 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Play with Intrinsically-Motivated Self-Aware Agents
Oct 30, 2018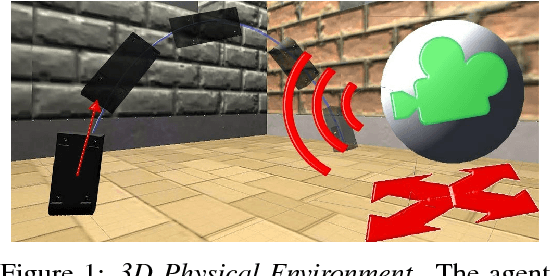
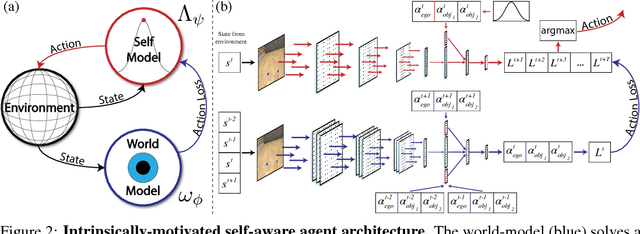
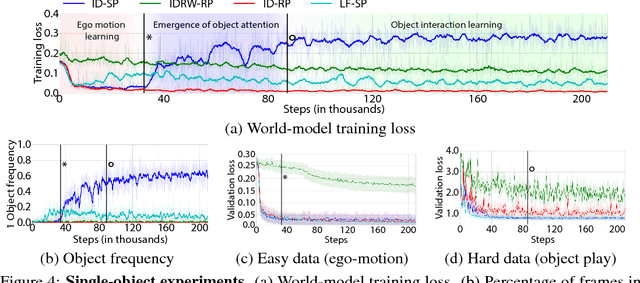
Infants are experts at playing, with an amazing ability to generate novel structured behaviors in unstructured environments that lack clear extrinsic reward signals. We seek to mathematically formalize these abilities using a neural network that implements curiosity-driven intrinsic motivation. Using a simple but ecologically naturalistic simulated environment in which an agent can move and interact with objects it sees, we propose a "world-model" network that learns to predict the dynamic consequences of the agent's actions. Simultaneously, we train a separate explicit "self-model" that allows the agent to track the error map of its own world-model, and then uses the self-model to adversarially challenge the developing world-model. We demonstrate that this policy causes the agent to explore novel and informative interactions with its environment, leading to the generation of a spectrum of complex behaviors, including ego-motion prediction, object attention, and object gathering. Moreover, the world-model that the agent learns supports improved performance on object dynamics prediction, detection, localization and recognition tasks. Taken together, our results are initial steps toward creating flexible autonomous agents that self-supervise in complex novel physical environments.
Flexible Neural Representation for Physics Prediction
Oct 27, 2018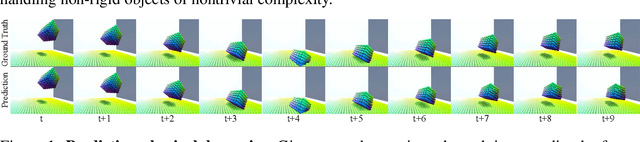
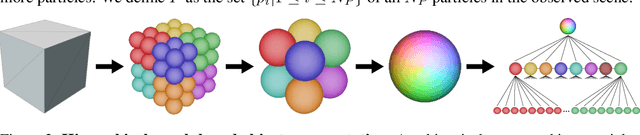
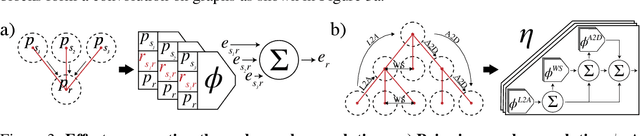
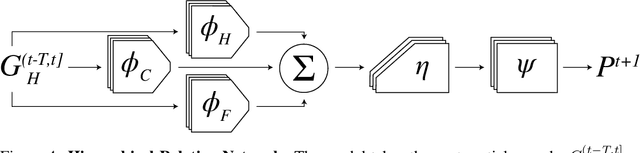
Humans have a remarkable capacity to understand the physical dynamics of objects in their environment, flexibly capturing complex structures and interactions at multiple levels of detail. Inspired by this ability, we propose a hierarchical particle-based object representation that covers a wide variety of types of three-dimensional objects, including both arbitrary rigid geometrical shapes and deformable materials. We then describe the Hierarchical Relation Network (HRN), an end-to-end differentiable neural network based on hierarchical graph convolution, that learns to predict physical dynamics in this representation. Compared to other neural network baselines, the HRN accurately handles complex collisions and nonrigid deformations, generating plausible dynamics predictions at long time scales in novel settings, and scaling to large scene configurations. These results demonstrate an architecture with the potential to form the basis of next-generation physics predictors for use in computer vision, robotics, and quantitative cognitive science.
Learning to Decompose and Disentangle Representations for Video Prediction
Oct 17, 2018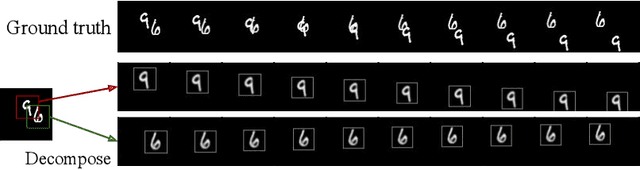
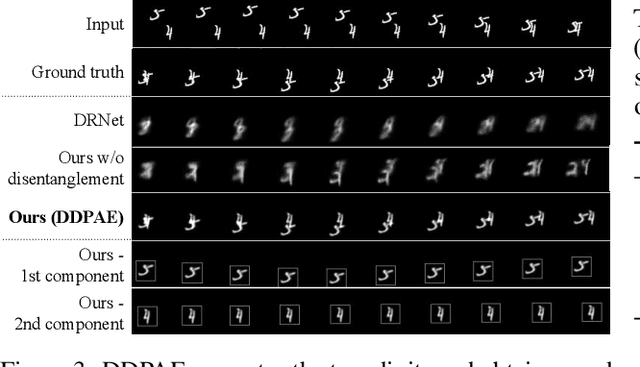
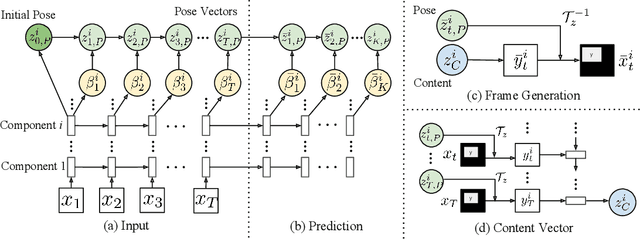
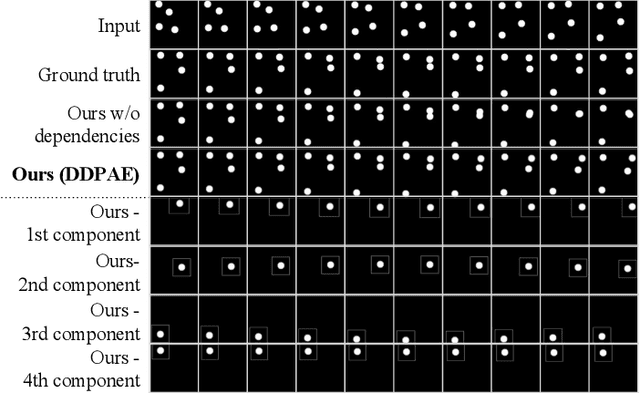
Our goal is to predict future video frames given a sequence of input frames. Despite large amounts of video data, this remains a challenging task because of the high-dimensionality of video frames. We address this challenge by proposing the Decompositional Disentangled Predictive Auto-Encoder (DDPAE), a framework that combines structured probabilistic models and deep networks to automatically (i) decompose the high-dimensional video that we aim to predict into components, and (ii) disentangle each component to have low-dimensional temporal dynamics that are easier to predict. Crucially, with an appropriately specified generative model of video frames, our DDPAE is able to learn both the latent decomposition and disentanglement without explicit supervision. For the Moving MNIST dataset, we show that DDPAE is able to recover the underlying components (individual digits) and disentanglement (appearance and location) as we would intuitively do. We further demonstrate that DDPAE can be applied to the Bouncing Balls dataset involving complex interactions between multiple objects to predict the video frame directly from the pixels and recover physical states without explicit supervision.
MentorNet: Learning Data-Driven Curriculum for Very Deep Neural Networks on Corrupted Labels
Aug 13, 2018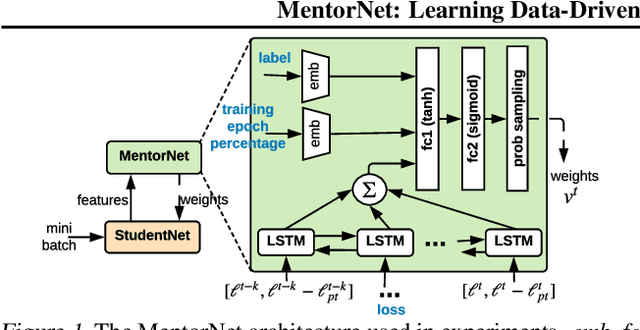
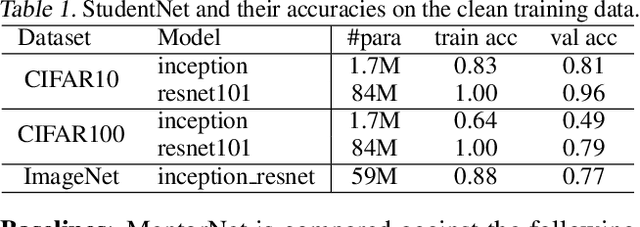

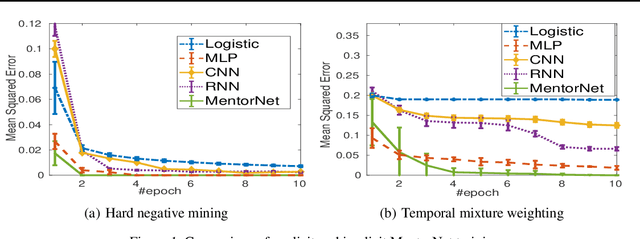
Recent deep networks are capable of memorizing the entire data even when the labels are completely random. To overcome the overfitting on corrupted labels, we propose a novel technique of learning another neural network, called MentorNet, to supervise the training of the base deep networks, namely, StudentNet. During training, MentorNet provides a curriculum (sample weighting scheme) for StudentNet to focus on the sample the label of which is probably correct. Unlike the existing curriculum that is usually predefined by human experts, MentorNet learns a data-driven curriculum dynamically with StudentNet. Experimental results demonstrate that our approach can significantly improve the generalization performance of deep networks trained on corrupted training data. Notably, to the best of our knowledge, we achieve the best-published result on WebVision, a large benchmark containing 2.2 million images of real-world noisy labels. The code are at https://github.com/google/mentornet
Graph Distillation for Action Detection with Privileged Modalities
Jul 27, 2018
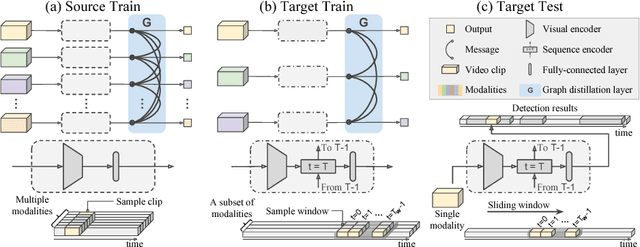
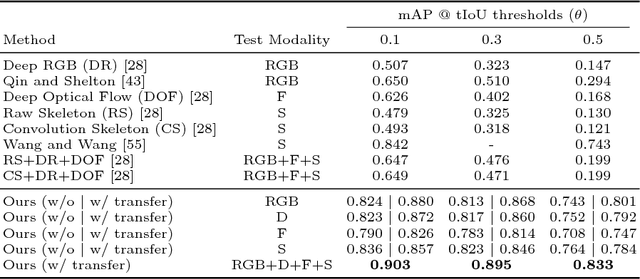
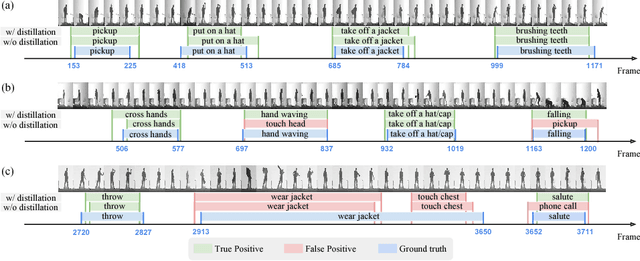
We propose a technique that tackles action detection in multimodal videos under a realistic and challenging condition in which only limited training data and partially observed modalities are available. Common methods in transfer learning do not take advantage of the extra modalities potentially available in the source domain. On the other hand, previous work on multimodal learning only focuses on a single domain or task and does not handle the modality discrepancy between training and testing. In this work, we propose a method termed graph distillation that incorporates rich privileged information from a large-scale multimodal dataset in the source domain, and improves the learning in the target domain where training data and modalities are scarce. We evaluate our approach on action classification and detection tasks in multimodal videos, and show that our model outperforms the state-of-the-art by a large margin on the NTU RGB+D and PKU-MMD benchmarks. The code is released at http://alan.vision/eccv18_graph/.
Progressive Neural Architecture Search
Jul 26, 2018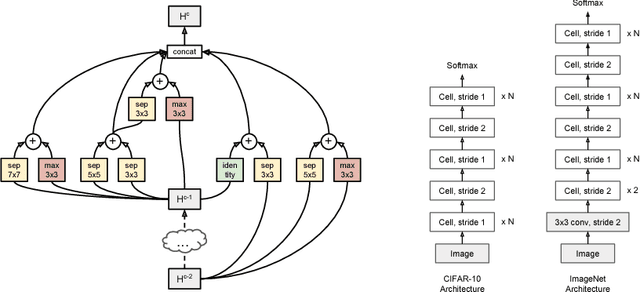
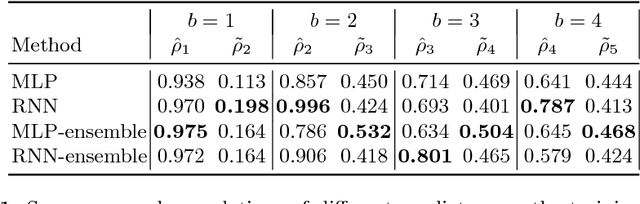
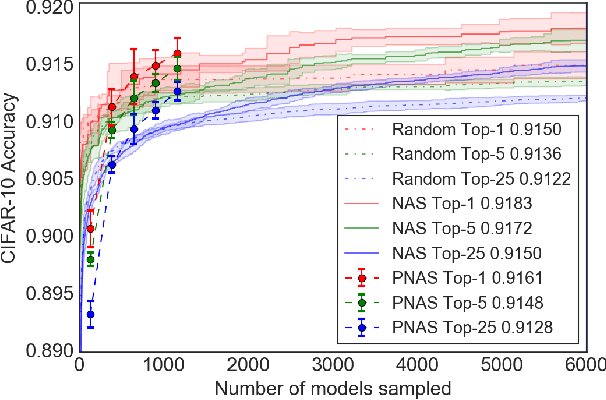
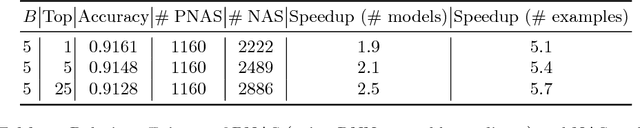
We propose a new method for learning the structure of convolutional neural networks (CNNs) that is more efficient than recent state-of-the-art methods based on reinforcement learning and evolutionary algorithms. Our approach uses a sequential model-based optimization (SMBO) strategy, in which we search for structures in order of increasing complexity, while simultaneously learning a surrogate model to guide the search through structure space. Direct comparison under the same search space shows that our method is up to 5 times more efficient than the RL method of Zoph et al. (2018) in terms of number of models evaluated, and 8 times faster in terms of total compute. The structures we discover in this way achieve state of the art classification accuracies on CIFAR-10 and ImageNet.
HiDDeN: Hiding Data With Deep Networks
Jul 26, 2018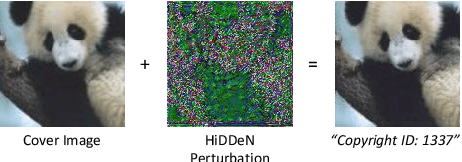
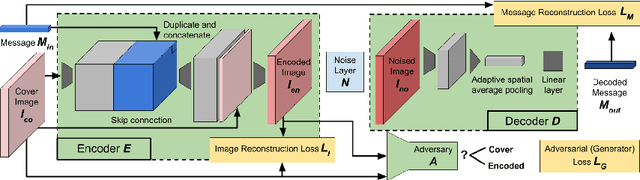
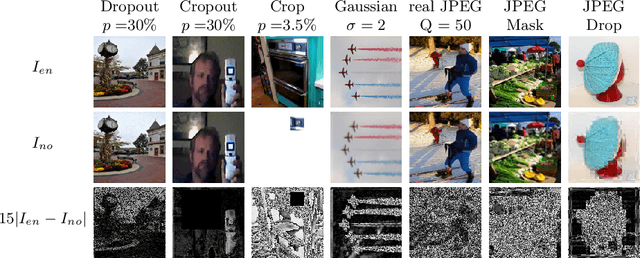
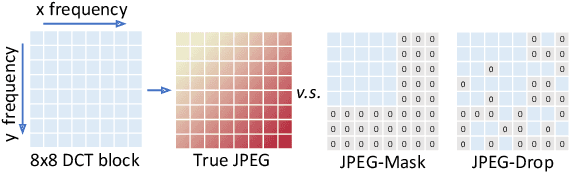
Recent work has shown that deep neural networks are highly sensitive to tiny perturbations of input images, giving rise to adversarial examples. Though this property is usually considered a weakness of learned models, we explore whether it can be beneficial. We find that neural networks can learn to use invisible perturbations to encode a rich amount of useful information. In fact, one can exploit this capability for the task of data hiding. We jointly train encoder and decoder networks, where given an input message and cover image, the encoder produces a visually indistinguishable encoded image, from which the decoder can recover the original message. We show that these encodings are competitive with existing data hiding algorithms, and further that they can be made robust to noise: our models learn to reconstruct hidden information in an encoded image despite the presence of Gaussian blurring, pixel-wise dropout, cropping, and JPEG compression. Even though JPEG is non-differentiable, we show that a robust model can be trained using differentiable approximations. Finally, we demonstrate that adversarial training improves the visual quality of encoded images.
Tool Detection and Operative Skill Assessment in Surgical Videos Using Region-Based Convolutional Neural Networks
Jul 22, 2018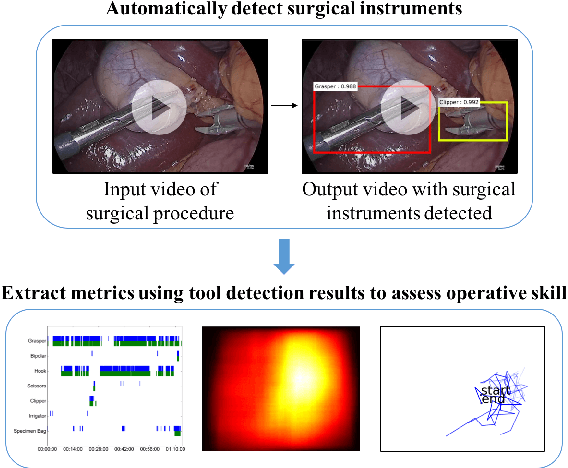
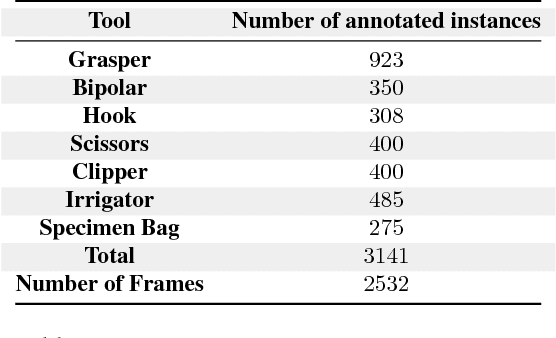
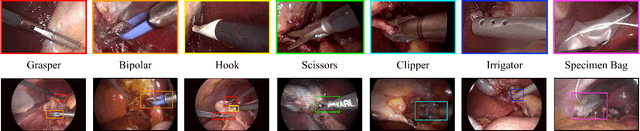
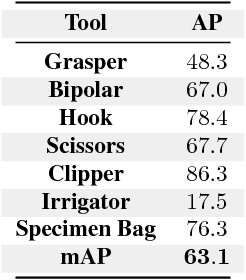
Five billion people in the world lack access to quality surgical care. Surgeon skill varies dramatically, and many surgical patients suffer complications and avoidable harm. Improving surgical training and feedback would help to reduce the rate of complications, half of which have been shown to be preventable. To do this, it is essential to assess operative skill, a process that currently requires experts and is manual, time consuming, and subjective. In this work, we introduce an approach to automatically assess surgeon performance by tracking and analyzing tool movements in surgical videos, leveraging region-based convolutional neural networks. In order to study this problem, we also introduce a new dataset, m2cai16-tool-locations, which extends the m2cai16-tool dataset with spatial bounds of tools. While previous methods have addressed tool presence detection, ours is the first to not only detect presence but also spatially localize surgical tools in real-world laparoscopic surgical videos. We show that our method both effectively detects the spatial bounds of tools as well as significantly outperforms existing methods on tool presence detection. We further demonstrate the ability of our method to assess surgical quality through analysis of tool usage patterns, movement range, and economy of motion.
Learning Task-Oriented Grasping for Tool Manipulation from Simulated Self-Supervision
Jun 25, 2018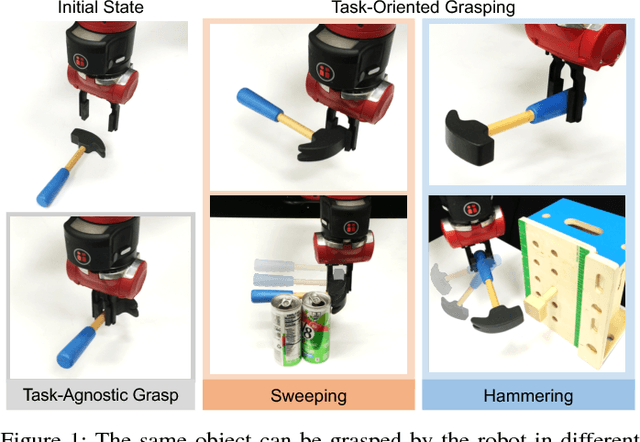
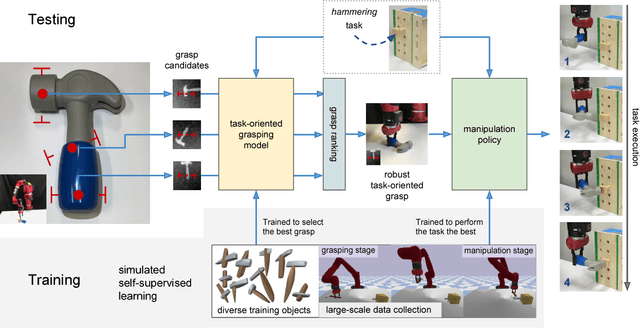
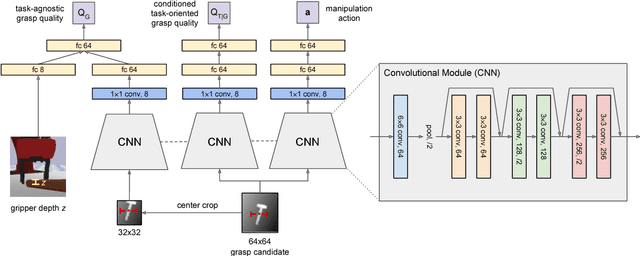
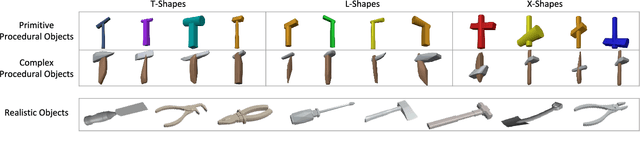
Tool manipulation is vital for facilitating robots to complete challenging task goals. It requires reasoning about the desired effect of the task and thus properly grasping and manipulating the tool to achieve the task. Task-agnostic grasping optimizes for grasp robustness while ignoring crucial task-specific constraints. In this paper, we propose the Task-Oriented Grasping Network (TOG-Net) to jointly optimize both task-oriented grasping of a tool and the manipulation policy for that tool. The training process of the model is based on large-scale simulated self-supervision with procedurally generated tool objects. We perform both simulated and real-world experiments on two tool-based manipulation tasks: sweeping and hammering. Our model achieves overall 71.1% task success rate for sweeping and 80.0% task success rate for hammering. Supplementary material is available at: bit.ly/task-oriented-grasp
Thoracic Disease Identification and Localization with Limited Supervision
Jun 20, 2018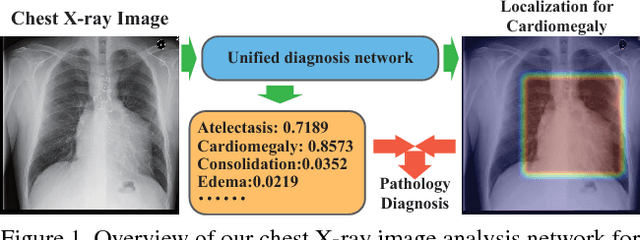

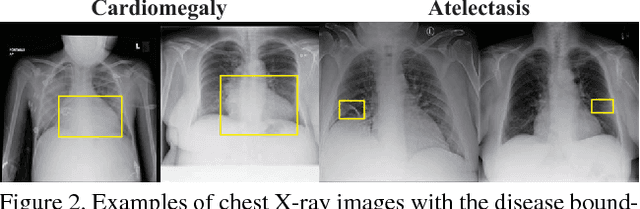
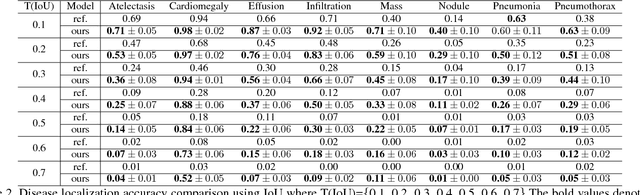
Accurate identification and localization of abnormalities from radiology images play an integral part in clinical diagnosis and treatment planning. Building a highly accurate prediction model for these tasks usually requires a large number of images manually annotated with labels and finding sites of abnormalities. In reality, however, such annotated data are expensive to acquire, especially the ones with location annotations. We need methods that can work well with only a small amount of location annotations. To address this challenge, we present a unified approach that simultaneously performs disease identification and localization through the same underlying model for all images. We demonstrate that our approach can effectively leverage both class information as well as limited location annotation, and significantly outperforms the comparative reference baseline in both classification and localization tasks.