 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Llama 4 Herd: Architecture, Training, Evaluation, and Deployment Notes
Jan 15, 2026This document consolidates publicly reported technical details about Metas Llama 4 model family. It summarizes (i) released variants (Scout and Maverick) and the broader herd context including the previewed Behemoth teacher model, (ii) architectural characteristics beyond a high-level MoE description covering routed/shared-expert structure, early-fusion multimodality, and long-context design elements reported for Scout (iRoPE and length generalization strategies), (iii) training disclosures spanning pre-training, mid-training for long-context extension, and post-training methodology (lightweight SFT, online RL, and lightweight DPO) as described in release materials, (iv) developer-reported benchmark results for both base and instruction-tuned checkpoints, and (v) practical deployment constraints observed across major serving environments, including provider-specific context limits and quantization packaging. The manuscript also summarizes licensing obligations relevant to redistribution and derivative naming, and reviews publicly described safeguards and evaluation practices. The goal is to provide a compact technical reference for researchers and practitioners who need precise, source-backed facts about Llama 4.
SAM 2: Segment Anything in Images and Videos
Aug 01, 2024



We present Segment Anything Model 2 (SAM 2), a foundation model towards solving promptable visual segmentation in images and videos. We build a data engine, which improves model and data via user interaction, to collect the largest video segmentation dataset to date. Our model is a simple transformer architecture with streaming memory for real-time video processing. SAM 2 trained on our data provides strong performance across a wide range of tasks. In video segmentation, we observe better accuracy, using 3x fewer interactions than prior approaches. In image segmentation, our model is more accurate and 6x faster than the Segment Anything Model (SAM). We believe that our data, model, and insights will serve as a significant milestone for video segmentation and related perception tasks. We are releasing a version of our model, the dataset and an interactive demo.
ImageBind: One Embedding Space To Bind Them All
May 09, 2023We present ImageBind, an approach to learn a joint embedding across six different modalities - images, text, audio, depth, thermal, and IMU data. We show that all combinations of paired data are not necessary to train such a joint embedding, and only image-paired data is sufficient to bind the modalities together. ImageBind can leverage recent large scale vision-language models, and extends their zero-shot capabilities to new modalities just by using their natural pairing with images. It enables novel emergent applications 'out-of-the-box' including cross-modal retrieval, composing modalities with arithmetic, cross-modal detection and generation. The emergent capabilities improve with the strength of the image encoder and we set a new state-of-the-art on emergent zero-shot recognition tasks across modalities, outperforming specialist supervised models. Finally, we show strong few-shot recognition results outperforming prior work, and that ImageBind serves as a new way to evaluate vision models for visual and non-visual tasks.
The effectiveness of MAE pre-pretraining for billion-scale pretraining
Mar 23, 2023



This paper revisits the standard pretrain-then-finetune paradigm used in computer vision for visual recognition tasks. Typically, state-of-the-art foundation models are pretrained using large scale (weakly) supervised datasets with billions of images. We introduce an additional pre-pretraining stage that is simple and uses the self-supervised MAE technique to initialize the model. While MAE has only been shown to scale with the size of models, we find that it scales with the size of the training dataset as well. Thus, our MAE-based pre-pretraining scales with both model and data size making it applicable for training foundation models. Pre-pretraining consistently improves both the model convergence and the downstream transfer performance across a range of model scales (millions to billions of parameters), and dataset sizes (millions to billions of images). We measure the effectiveness of pre-pretraining on 10 different visual recognition tasks spanning image classification, video recognition, object detection, low-shot classification and zero-shot recognition. Our largest model achieves new state-of-the-art results on iNaturalist-18 (91.3%), 1-shot ImageNet-1k (62.1%), and zero-shot transfer on Food-101 (96.0%). Our study reveals that model initialization plays a significant role, even for web-scale pretraining with billions of images.
OmniMAE: Single Model Masked Pretraining on Images and Videos
Jun 16, 2022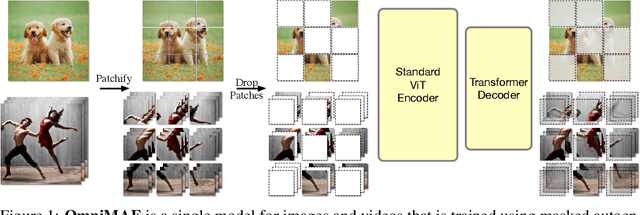
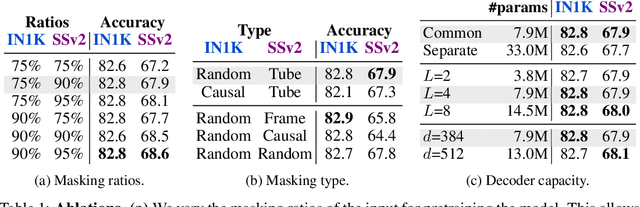
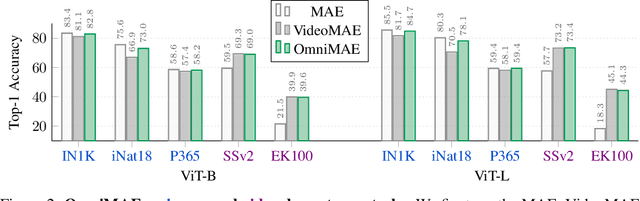
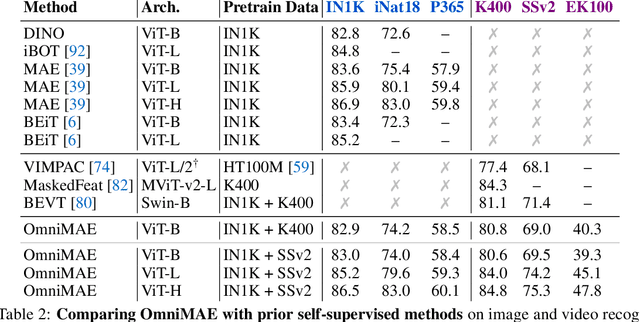
Transformer-based architectures have become competitive across a variety of visual domains, most notably images and videos. While prior work has studied these modalities in isolation, having a common architecture suggests that one can train a single unified model for multiple visual modalities. Prior attempts at unified modeling typically use architectures tailored for vision tasks, or obtain worse performance compared to single modality models. In this work, we show that masked autoencoding can be used to train a simple Vision Transformer on images and videos, without requiring any labeled data. This single model learns visual representations that are comparable to or better than single-modality representations on both image and video benchmarks, while using a much simpler architecture. In particular, our single pretrained model can be finetuned to achieve 86.5% on ImageNet and 75.3% on the challenging Something Something-v2 video benchmark. Furthermore, this model can be learned by dropping 90% of the image and 95% of the video patches, enabling extremely fast training.
Pre-train, Self-train, Distill: A simple recipe for Supersizing 3D Reconstruction
Apr 07, 2022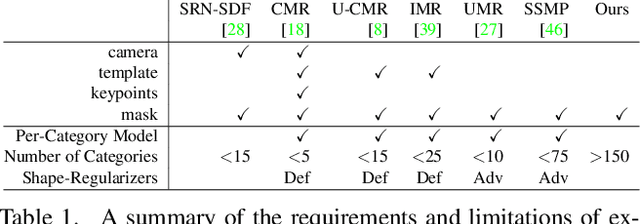

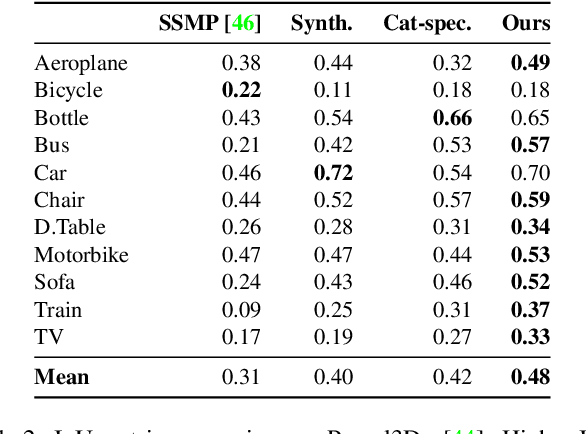
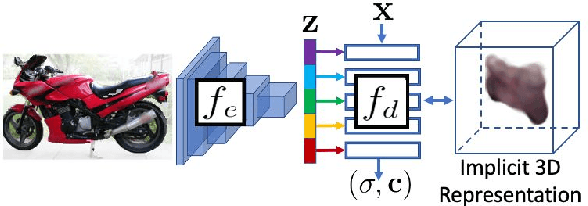
Our work learns a unified model for single-view 3D reconstruction of objects from hundreds of semantic categories. As a scalable alternative to direct 3D supervision, our work relies on segmented image collections for learning 3D of generic categories. Unlike prior works that use similar supervision but learn independent category-specific models from scratch, our approach of learning a unified model simplifies the training process while also allowing the model to benefit from the common structure across categories. Using image collections from standard recognition datasets, we show that our approach allows learning 3D inference for over 150 object categories. We evaluate using two datasets and qualitatively and quantitatively show that our unified reconstruction approach improves over prior category-specific reconstruction baselines. Our final 3D reconstruction model is also capable of zero-shot inference on images from unseen object categories and we empirically show that increasing the number of training categories improves the reconstruction quality.
PyTorchVideo: A Deep Learning Library for Video Understanding
Nov 18, 2021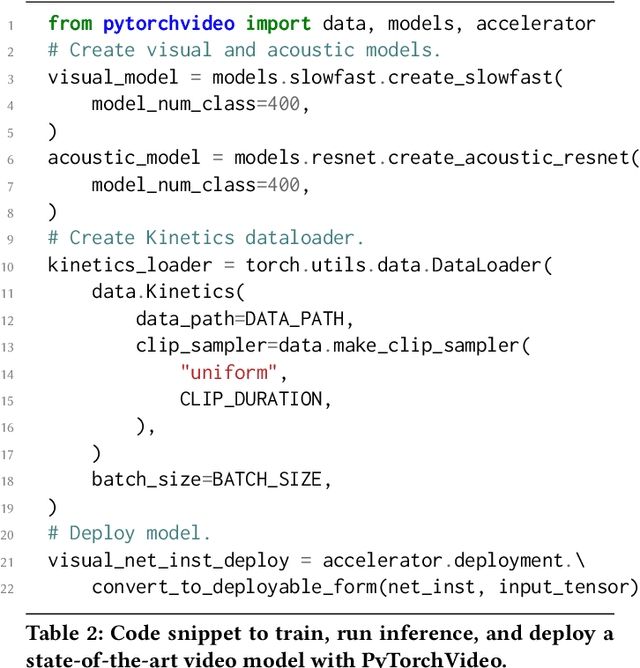
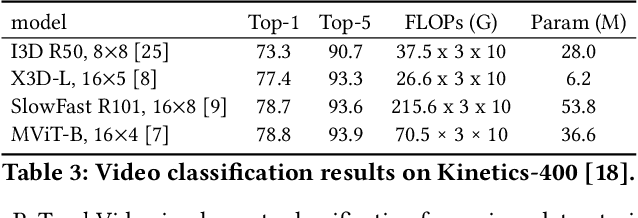
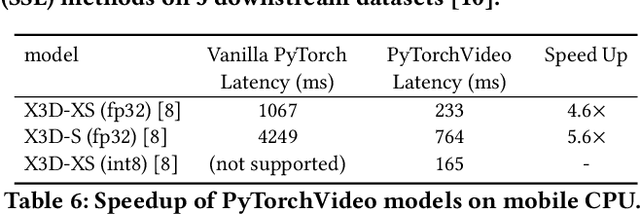
We introduce PyTorchVideo, an open-source deep-learning library that provides a rich set of modular, efficient, and reproducible components for a variety of video understanding tasks, including classification, detection, self-supervised learning, and low-level processing. The library covers a full stack of video understanding tools including multimodal data loading, transformations, and models that reproduce state-of-the-art performance. PyTorchVideo further supports hardware acceleration that enables real-time inference on mobile devices. The library is based on PyTorch and can be used by any training framework; for example, PyTorchLightning, PySlowFast, or Classy Vision. PyTorchVideo is available at https://pytorchvideo.org/
Revitalizing Optimization for 3D Human Pose and Shape Estimation: A Sparse Constrained Formulation
May 28, 2021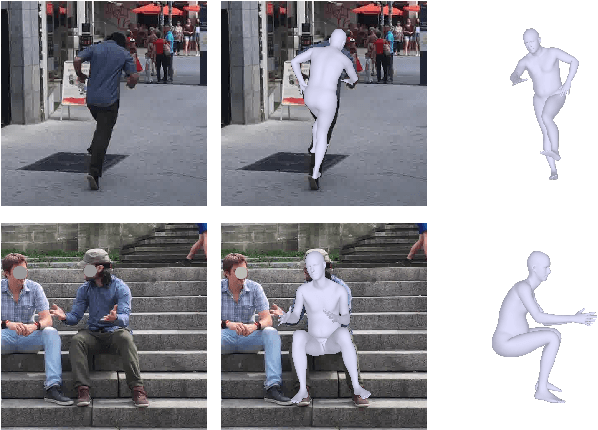
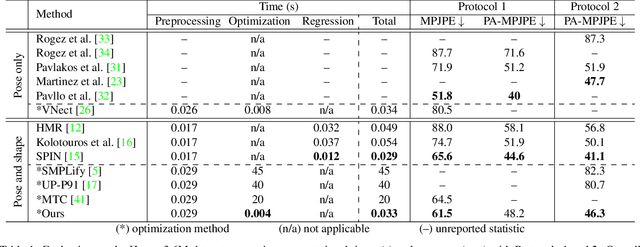

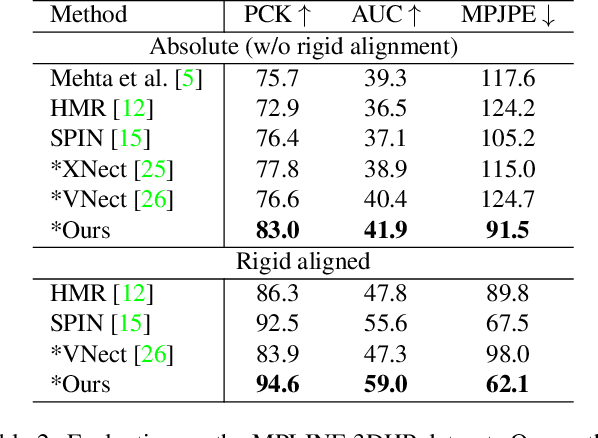
We propose a novel sparse constrained formulation and from it derive a real-time optimization method for 3D human pose and shape estimation. Our optimization method is orders of magnitude faster (avg. 4 ms convergence) than existing optimization methods, while being mathematically equivalent to their dense unconstrained formulation. We achieve this by exploiting the underlying sparsity and constraints of our formulation to efficiently compute the Gauss-Newton direction. We show that this computation scales linearly with the number of joints of a complex 3D human model, in contrast to prior work where it scales cubically due to their dense unconstrained formulation. Based on our optimization method, we present a real-time motion capture framework that estimates 3D human poses and shapes from a single image at over 30 FPS. In benchmarks against state-of-the-art methods on multiple public datasets, our frame-work outperforms other optimization methods and achieves competitive accuracy against regression methods.
Joint Sampling and Trajectory Optimization over Graphs for Online Motion Planning
Nov 13, 2020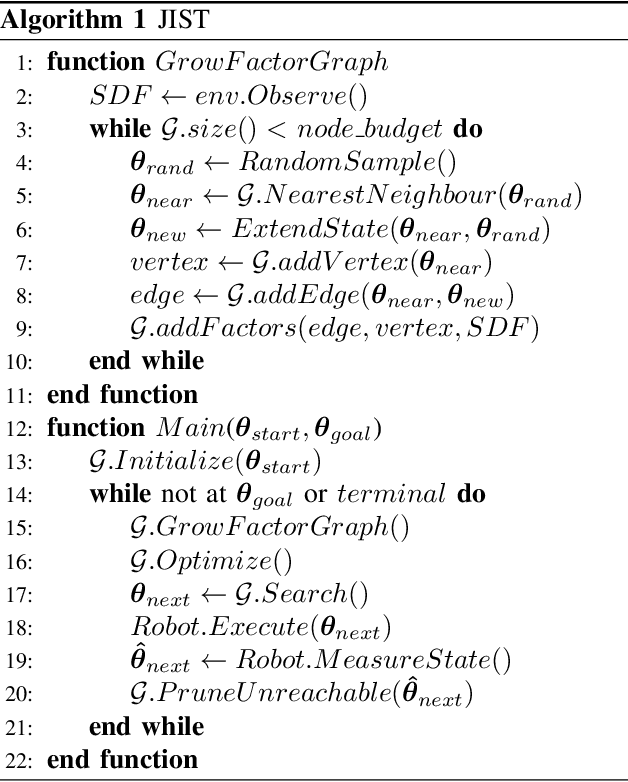
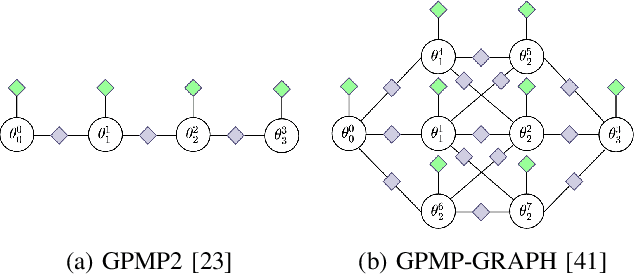
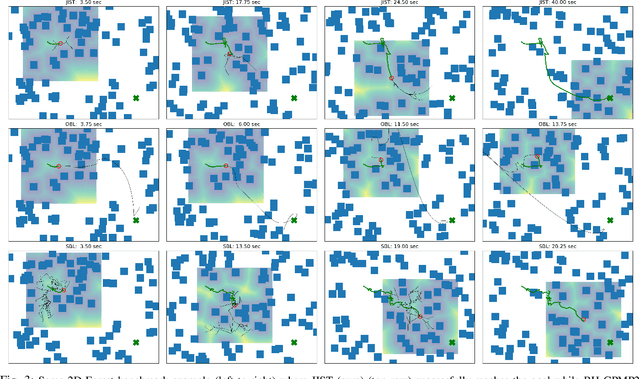
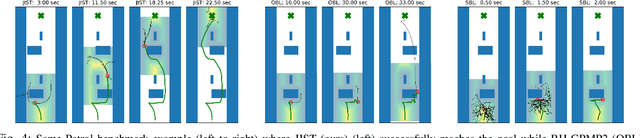
Among the most prevailing motion planning techniques, sampling and trajectory optimization have emerged successful due to their ability to handle tight constraints and high-dimensional systems respectively. However, limitations in sampling in higher dimensions and local minima issues in optimization have hindered their ability to excel beyond static scenes in offline settings. Here we consider highly dynamic environments with long horizons that necessitate a fast online solution. We present a unified approach that leverages the complementary strengths of sampling and optimization, and interleaves them both in a manner that is well suited to this challenging problem. With benchmarks in multiple synthetic and realistic simulated environments, we show our approach is significantly better in performance on various metrics against baselines that only either employ sampling or optimization. Supplementary video: https://youtu.be/lfzZ6Vfzjvg
PyRobot: An Open-source Robotics Framework for Research and Benchmarking
Jun 19, 2019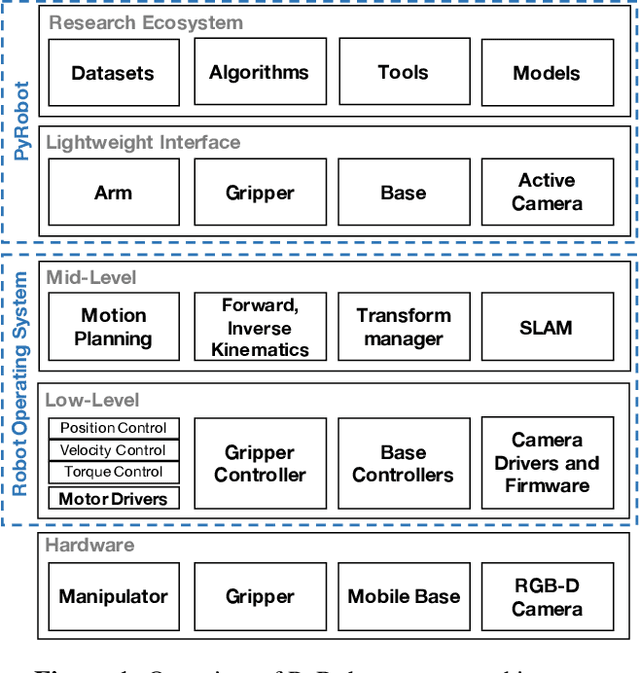
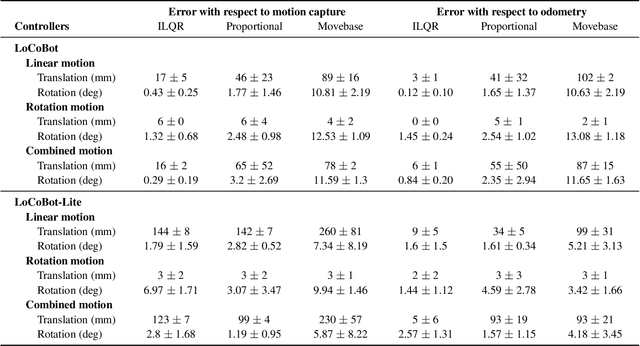
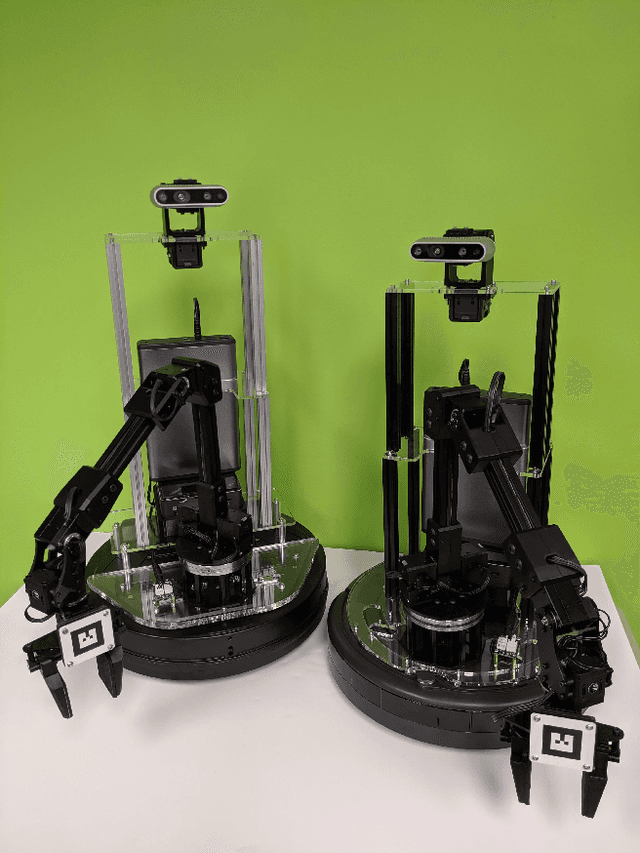
This paper introduces PyRobot, an open-source robotics framework for research and benchmarking. PyRobot is a light-weight, high-level interface on top of ROS that provides a consistent set of hardware independent mid-level APIs to control different robots. PyRobot abstracts away details about low-level controllers and inter-process communication, and allows non-robotics researchers (ML, CV researchers) to focus on building high-level AI applications. PyRobot aims to provide a research ecosystem with convenient access to robotics datasets, algorithm implementations and models that can be used to quickly create a state-of-the-art baseline. We believe PyRobot, when paired up with low-cost robot platforms such as LoCoBot, will reduce the entry barrier into robotics, and democratize robotics. PyRobot is open-source, and can be accessed via https://pyrobot.org.