 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeREWIND: Real-Time Egocentric Whole-Body Motion Diffusion with Exemplar-Based Identity Conditioning
Apr 08, 2025We present REWIND (Real-Time Egocentric Whole-Body Motion Diffusion), a one-step diffusion model for real-time, high-fidelity human motion estimation from egocentric image inputs. While an existing method for egocentric whole-body (i.e., body and hands) motion estimation is non-real-time and acausal due to diffusion-based iterative motion refinement to capture correlations between body and hand poses, REWIND operates in a fully causal and real-time manner. To enable real-time inference, we introduce (1) cascaded body-hand denoising diffusion, which effectively models the correlation between egocentric body and hand motions in a fast, feed-forward manner, and (2) diffusion distillation, which enables high-quality motion estimation with a single denoising step. Our denoising diffusion model is based on a modified Transformer architecture, designed to causally model output motions while enhancing generalizability to unseen motion lengths. Additionally, REWIND optionally supports identity-conditioned motion estimation when identity prior is available. To this end, we propose a novel identity conditioning method based on a small set of pose exemplars of the target identity, which further enhances motion estimation quality. Through extensive experiments, we demonstrate that REWIND significantly outperforms the existing baselines both with and without exemplar-based identity conditioning.
Grasping Diverse Objects with Simulated Humanoids
Jul 16, 2024We present a method for controlling a simulated humanoid to grasp an object and move it to follow an object trajectory. Due to the challenges in controlling a humanoid with dexterous hands, prior methods often use a disembodied hand and only consider vertical lifts or short trajectories. This limited scope hampers their applicability for object manipulation required for animation and simulation. To close this gap, we learn a controller that can pick up a large number (>1200) of objects and carry them to follow randomly generated trajectories. Our key insight is to leverage a humanoid motion representation that provides human-like motor skills and significantly speeds up training. Using only simplistic reward, state, and object representations, our method shows favorable scalability on diverse object and trajectories. For training, we do not need dataset of paired full-body motion and object trajectories. At test time, we only require the object mesh and desired trajectories for grasping and transporting. To demonstrate the capabilities of our method, we show state-of-the-art success rates in following object trajectories and generalizing to unseen objects. Code and models will be released.
Authentic Hand Avatar from a Phone Scan via Universal Hand Model
May 13, 2024



The authentic 3D hand avatar with every identifiable information, such as hand shapes and textures, is necessary for immersive experiences in AR/VR. In this paper, we present a universal hand model (UHM), which 1) can universally represent high-fidelity 3D hand meshes of arbitrary identities (IDs) and 2) can be adapted to each person with a short phone scan for the authentic hand avatar. For effective universal hand modeling, we perform tracking and modeling at the same time, while previous 3D hand models perform them separately. The conventional separate pipeline suffers from the accumulated errors from the tracking stage, which cannot be recovered in the modeling stage. On the other hand, ours does not suffer from the accumulated errors while having a much more concise overall pipeline. We additionally introduce a novel image matching loss function to address a skin sliding during the tracking and modeling, while existing works have not focused on it much. Finally, using learned priors from our UHM, we effectively adapt our UHM to each person's short phone scan for the authentic hand avatar.
Real-Time Simulated Avatar from Head-Mounted Sensors
Mar 11, 2024



We present SimXR, a method for controlling a simulated avatar from information (headset pose and cameras) obtained from AR / VR headsets. Due to the challenging viewpoint of head-mounted cameras, the human body is often clipped out of view, making traditional image-based egocentric pose estimation challenging. On the other hand, headset poses provide valuable information about overall body motion, but lack fine-grained details about the hands and feet. To synergize headset poses with cameras, we control a humanoid to track headset movement while analyzing input images to decide body movement. When body parts are seen, the movements of hands and feet will be guided by the images; when unseen, the laws of physics guide the controller to generate plausible motion. We design an end-to-end method that does not rely on any intermediate representations and learns to directly map from images and headset poses to humanoid control signals. To train our method, we also propose a large-scale synthetic dataset created using camera configurations compatible with a commercially available VR headset (Quest 2) and show promising results on real-world captures. To demonstrate the applicability of our framework, we also test it on an AR headset with a forward-facing camera.
A Dataset of Relighted 3D Interacting Hands
Oct 26, 2023



The two-hand interaction is one of the most challenging signals to analyze due to the self-similarity, complicated articulations, and occlusions of hands. Although several datasets have been proposed for the two-hand interaction analysis, all of them do not achieve 1) diverse and realistic image appearances and 2) diverse and large-scale groundtruth (GT) 3D poses at the same time. In this work, we propose Re:InterHand, a dataset of relighted 3D interacting hands that achieve the two goals. To this end, we employ a state-of-the-art hand relighting network with our accurately tracked two-hand 3D poses. We compare our Re:InterHand with existing 3D interacting hands datasets and show the benefit of it. Our Re:InterHand is available in https://mks0601.github.io/ReInterHand/.
Universal Humanoid Motion Representations for Physics-Based Control
Oct 06, 2023



We present a universal motion representation that encompasses a comprehensive range of motor skills for physics-based humanoid control. Due to the high-dimensionality of humanoid control as well as the inherent difficulties in reinforcement learning, prior methods have focused on learning skill embeddings for a narrow range of movement styles (e.g. locomotion, game characters) from specialized motion datasets. This limited scope hampers its applicability in complex tasks. Our work closes this gap, significantly increasing the coverage of motion representation space. To achieve this, we first learn a motion imitator that can imitate all of human motion from a large, unstructured motion dataset. We then create our motion representation by distilling skills directly from the imitator. This is achieved using an encoder-decoder structure with a variational information bottleneck. Additionally, we jointly learn a prior conditioned on proprioception (humanoid's own pose and velocities) to improve model expressiveness and sampling efficiency for downstream tasks. Sampling from the prior, we can generate long, stable, and diverse human motions. Using this latent space for hierarchical RL, we show that our policies solve tasks using natural and realistic human behavior. We demonstrate the effectiveness of our motion representation by solving generative tasks (e.g. strike, terrain traversal) and motion tracking using VR controllers.
Perpetual Humanoid Control for Real-time Simulated Avatars
May 24, 2023



We present a physics-based humanoid controller that achieves high-fidelity motion imitation and fault-tolerant behavior in the presence of noisy input (e.g. pose estimates from video or generated from language) and unexpected falls. Our controller scales up to learning ten thousand motion clips without using any external stabilizing forces and learns to naturally recover from fail-state. Given reference motion, our controller can perpetually control simulated avatars without requiring resets. At its core, we propose the progressive multiplicative control policy (PMCP), which dynamically allocates new network capacity to learn harder and harder motion sequences. PMCP allows efficient scaling for learning from large-scale motion databases and adding new tasks, such as fail-state recovery, without catastrophic forgetting. We demonstrate the effectiveness of our controller by using it to imitate noisy poses from video-based pose estimators and language-based motion generators in a live and real-time multi-person avatar use case.
Scene-aware Egocentric 3D Human Pose Estimation
Dec 20, 2022



Egocentric 3D human pose estimation with a single head-mounted fisheye camera has recently attracted attention due to its numerous applications in virtual and augmented reality. Existing methods still struggle in challenging poses where the human body is highly occluded or is closely interacting with the scene. To address this issue, we propose a scene-aware egocentric pose estimation method that guides the prediction of the egocentric pose with scene constraints. To this end, we propose an egocentric depth estimation network to predict the scene depth map from a wide-view egocentric fisheye camera while mitigating the occlusion of the human body with a depth-inpainting network. Next, we propose a scene-aware pose estimation network that projects the 2D image features and estimated depth map of the scene into a voxel space and regresses the 3D pose with a V2V network. The voxel-based feature representation provides the direct geometric connection between 2D image features and scene geometry, and further facilitates the V2V network to constrain the predicted pose based on the estimated scene geometry. To enable the training of the aforementioned networks, we also generated a synthetic dataset, called EgoGTA, and an in-the-wild dataset based on EgoPW, called EgoPW-Scene. The experimental results of our new evaluation sequences show that the predicted 3D egocentric poses are accurate and physically plausible in terms of human-scene interaction, demonstrating that our method outperforms the state-of-the-art methods both quantitatively and qualitatively.
Dressing Avatars: Deep Photorealistic Appearance for Physically Simulated Clothing
Jun 30, 2022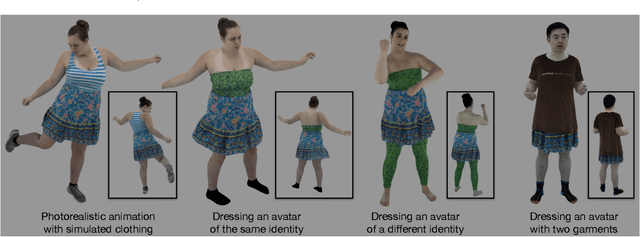
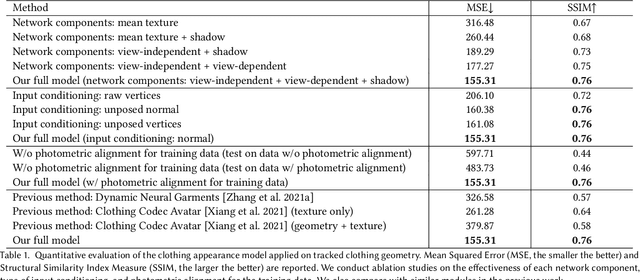
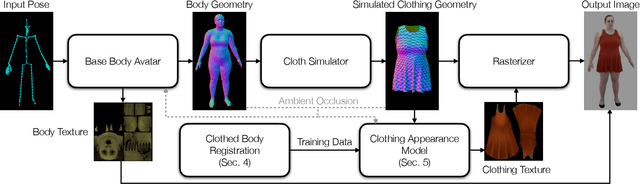
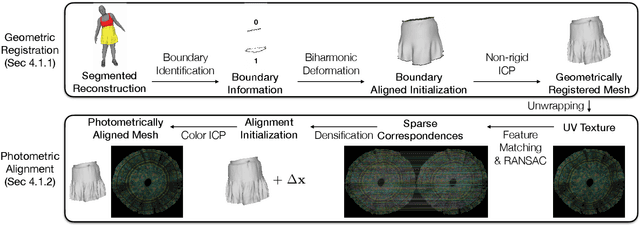
Despite recent progress in developing animatable full-body avatars, realistic modeling of clothing - one of the core aspects of human self-expression - remains an open challenge. State-of-the-art physical simulation methods can generate realistically behaving clothing geometry at interactive rate. Modeling photorealistic appearance, however, usually requires physically-based rendering which is too expensive for interactive applications. On the other hand, data-driven deep appearance models are capable of efficiently producing realistic appearance, but struggle at synthesizing geometry of highly dynamic clothing and handling challenging body-clothing configurations. To this end, we introduce pose-driven avatars with explicit modeling of clothing that exhibit both realistic clothing dynamics and photorealistic appearance learned from real-world data. The key idea is to introduce a neural clothing appearance model that operates on top of explicit geometry: at train time we use high-fidelity tracking, whereas at animation time we rely on physically simulated geometry. Our key contribution is a physically-inspired appearance network, capable of generating photorealistic appearance with view-dependent and dynamic shadowing effects even for unseen body-clothing configurations. We conduct a thorough evaluation of our model and demonstrate diverse animation results on several subjects and different types of clothing. Unlike previous work on photorealistic full-body avatars, our approach can produce much richer dynamics and more realistic deformations even for loose clothing. We also demonstrate that our formulation naturally allows clothing to be used with avatars of different people while staying fully animatable, thus enabling, for the first time, photorealistic avatars with novel clothing.
HULC: 3D Human Motion Capture with Pose Manifold Sampling and Dense Contact Guidance
May 24, 2022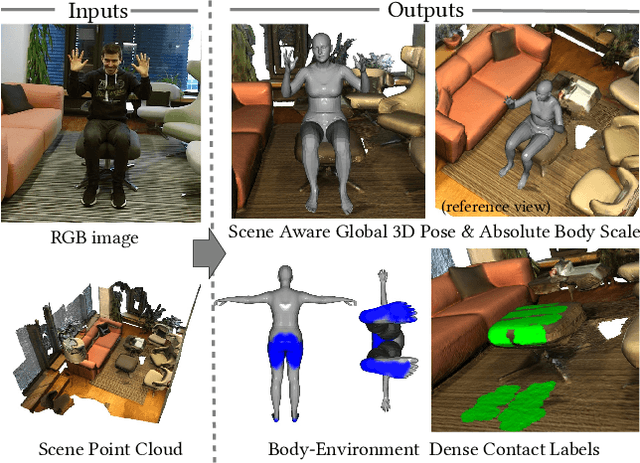
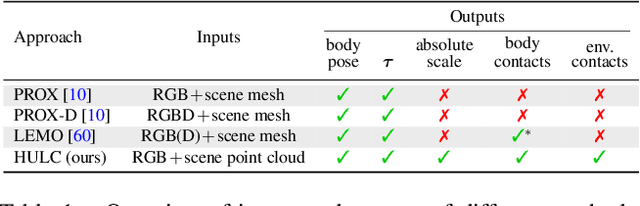
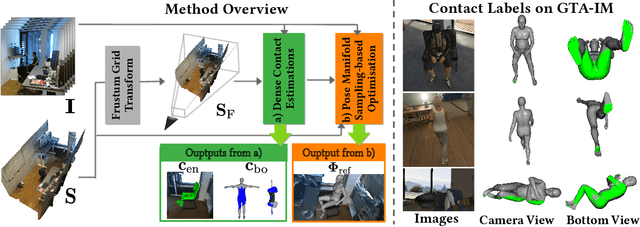
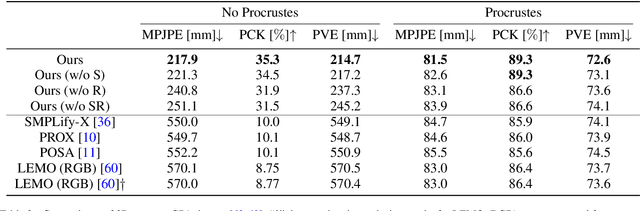
Marker-less monocular 3D human motion capture (MoCap) with scene interactions is a challenging research topic relevant for extended reality, robotics and virtual avatar generation. Due to the inherent depth ambiguity of monocular settings, 3D motions captured with existing methods often contain severe artefacts such as incorrect body-scene inter-penetrations, jitter and body floating. To tackle these issues, we propose HULC, a new approach for 3D human MoCap which is aware of the scene geometry. HULC estimates 3D poses and dense body-environment surface contacts for improved 3D localisations, as well as the absolute scale of the subject. Furthermore, we introduce a 3D pose trajectory optimisation based on a novel pose manifold sampling that resolves erroneous body-environment inter-penetrations. Although the proposed method requires less structured inputs compared to existing scene-aware monocular MoCap algorithms, it produces more physically-plausible poses: HULC significantly and consistently outperforms the existing approaches in various experiments and on different metrics.