 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFourier Controller Networks for Real-Time Decision-Making in Embodied Learning
May 30, 2024Reinforcement learning is able to obtain generalized low-level robot policies on diverse robotics datasets in embodied learning scenarios, and Transformer has been widely used to model time-varying features. However, it still suffers from the issues of low data efficiency and high inference latency. In this paper, we propose to investigate the task from a new perspective of the frequency domain. We first observe that the energy density in the frequency domain of a robot's trajectory is mainly concentrated in the low-frequency part. Then, we present the Fourier Controller Network (FCNet), a new network that utilizes the Short-Time Fourier Transform (STFT) to extract and encode time-varying features through frequency domain interpolation. We further achieve parallel training and efficient recurrent inference by using FFT and Sliding DFT methods in the model architecture for real-time decision-making. Comprehensive analyses in both simulated (e.g., D4RL) and real-world environments (e.g., robot locomotion) demonstrate FCNet's substantial efficiency and effectiveness over existing methods such as Transformer, e.g., FCNet outperforms Transformer on multi-environmental robotics datasets of all types of sizes (from 1.9M to 120M). The project page and code can be found https://thkkk.github.io/fcnet.
Accurate and Reliable Predictions with Mutual-Transport Ensemble
May 30, 2024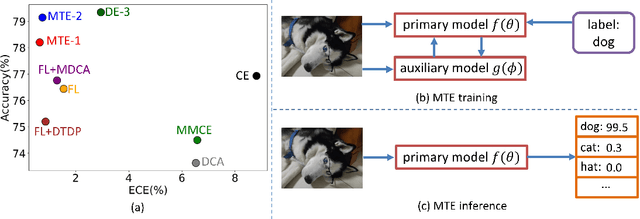
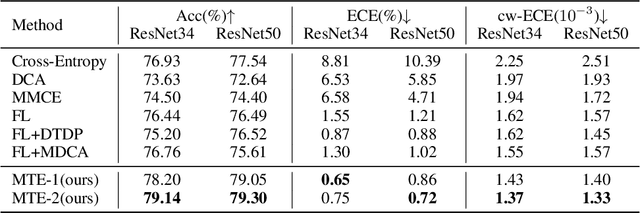
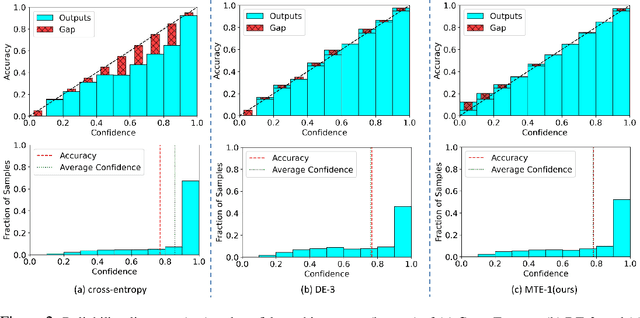
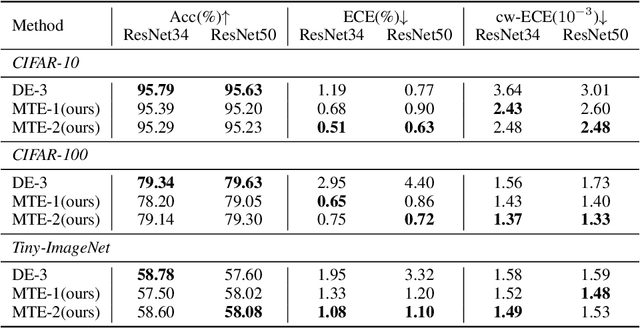
Deep Neural Networks (DNNs) have achieved remarkable success in a variety of tasks, especially when it comes to prediction accuracy. However, in complex real-world scenarios, particularly in safety-critical applications, high accuracy alone is not enough. Reliable uncertainty estimates are crucial. Modern DNNs, often trained with cross-entropy loss, tend to be overconfident, especially with ambiguous samples. To improve uncertainty calibration, many techniques have been developed, but they often compromise prediction accuracy. To tackle this challenge, we propose the ``mutual-transport ensemble'' (MTE). This approach introduces a co-trained auxiliary model and adaptively regularizes the cross-entropy loss using Kullback-Leibler (KL) divergence between the prediction distributions of the primary and auxiliary models. We conducted extensive studies on various benchmarks to validate the effectiveness of our method. The results show that MTE can simultaneously enhance both accuracy and uncertainty calibration. For example, on the CIFAR-100 dataset, our MTE method on ResNet34/50 achieved significant improvements compared to previous state-of-the-art method, with absolute accuracy increases of 2.4%/3.7%, relative reductions in ECE of $42.3%/29.4%, and relative reductions in classwise-ECE of 11.6%/15.3%.
Efficient Black-box Adversarial Attacks via Bayesian Optimization Guided by a Function Prior
May 29, 2024This paper studies the challenging black-box adversarial attack that aims to generate adversarial examples against a black-box model by only using output feedback of the model to input queries. Some previous methods improve the query efficiency by incorporating the gradient of a surrogate white-box model into query-based attacks due to the adversarial transferability. However, the localized gradient is not informative enough, making these methods still query-intensive. In this paper, we propose a Prior-guided Bayesian Optimization (P-BO) algorithm that leverages the surrogate model as a global function prior in black-box adversarial attacks. As the surrogate model contains rich prior information of the black-box one, P-BO models the attack objective with a Gaussian process whose mean function is initialized as the surrogate model's loss. Our theoretical analysis on the regret bound indicates that the performance of P-BO may be affected by a bad prior. Therefore, we further propose an adaptive integration strategy to automatically adjust a coefficient on the function prior by minimizing the regret bound. Extensive experiments on image classifiers and large vision-language models demonstrate the superiority of the proposed algorithm in reducing queries and improving attack success rates compared with the state-of-the-art black-box attacks. Code is available at https://github.com/yibo-miao/PBO-Attack.
Vidu4D: Single Generated Video to High-Fidelity 4D Reconstruction with Dynamic Gaussian Surfels
May 27, 2024Video generative models are receiving particular attention given their ability to generate realistic and imaginative frames. Besides, these models are also observed to exhibit strong 3D consistency, significantly enhancing their potential to act as world simulators. In this work, we present Vidu4D, a novel reconstruction model that excels in accurately reconstructing 4D (i.e., sequential 3D) representations from single generated videos, addressing challenges associated with non-rigidity and frame distortion. This capability is pivotal for creating high-fidelity virtual contents that maintain both spatial and temporal coherence. At the core of Vidu4D is our proposed Dynamic Gaussian Surfels (DGS) technique. DGS optimizes time-varying warping functions to transform Gaussian surfels (surface elements) from a static state to a dynamically warped state. This transformation enables a precise depiction of motion and deformation over time. To preserve the structural integrity of surface-aligned Gaussian surfels, we design the warped-state geometric regularization based on continuous warping fields for estimating normals. Additionally, we learn refinements on rotation and scaling parameters of Gaussian surfels, which greatly alleviates texture flickering during the warping process and enhances the capture of fine-grained appearance details. Vidu4D also contains a novel initialization state that provides a proper start for the warping fields in DGS. Equipping Vidu4D with an existing video generative model, the overall framework demonstrates high-fidelity text-to-4D generation in both appearance and geometry.
On Mesa-Optimization in Autoregressively Trained Transformers: Emergence and Capability
May 27, 2024



Autoregressively trained transformers have brought a profound revolution to the world, especially with their in-context learning (ICL) ability to address downstream tasks. Recently, several studies suggest that transformers learn a mesa-optimizer during autoregressive (AR) pretraining to implement ICL. Namely, the forward pass of the trained transformer is equivalent to optimizing an inner objective function in-context. However, whether the practical non-convex training dynamics will converge to the ideal mesa-optimizer is still unclear. Towards filling this gap, we investigate the non-convex dynamics of a one-layer linear causal self-attention model autoregressively trained by gradient flow, where the sequences are generated by an AR process $x_{t+1} = W x_t$. First, under a certain condition of data distribution, we prove that an autoregressively trained transformer learns $W$ by implementing one step of gradient descent to minimize an ordinary least squares (OLS) problem in-context. It then applies the learned $\widehat{W}$ for next-token prediction, thereby verifying the mesa-optimization hypothesis. Next, under the same data conditions, we explore the capability limitations of the obtained mesa-optimizer. We show that a stronger assumption related to the moments of data is the sufficient and necessary condition that the learned mesa-optimizer recovers the distribution. Besides, we conduct exploratory analyses beyond the first data condition and prove that generally, the trained transformer will not perform vanilla gradient descent for the OLS problem. Finally, our simulation results verify the theoretical results.
PivotMesh: Generic 3D Mesh Generation via Pivot Vertices Guidance
May 27, 2024



Generating compact and sharply detailed 3D meshes poses a significant challenge for current 3D generative models. Different from extracting dense meshes from neural representation, some recent works try to model the native mesh distribution (i.e., a set of triangles), which generates more compact results as humans crafted. However, due to the complexity and variety of mesh topology, these methods are typically limited to small datasets with specific categories and are hard to extend. In this paper, we introduce a generic and scalable mesh generation framework PivotMesh, which makes an initial attempt to extend the native mesh generation to large-scale datasets. We employ a transformer-based auto-encoder to encode meshes into discrete tokens and decode them from face level to vertex level hierarchically. Subsequently, to model the complex typology, we first learn to generate pivot vertices as coarse mesh representation and then generate the complete mesh tokens with the same auto-regressive Transformer. This reduces the difficulty compared with directly modeling the mesh distribution and further improves the model controllability. PivotMesh demonstrates its versatility by effectively learning from both small datasets like Shapenet, and large-scale datasets like Objaverse and Objaverse-xl. Extensive experiments indicate that PivotMesh can generate compact and sharp 3D meshes across various categories, highlighting its great potential for native mesh modeling.
Diffusion Bridge Implicit Models
May 24, 2024



Denoising diffusion bridge models (DDBMs) are a powerful variant of diffusion models for interpolating between two arbitrary paired distributions given as endpoints. Despite their promising performance in tasks like image translation, DDBMs require a computationally intensive sampling process that involves the simulation of a (stochastic) differential equation through hundreds of network evaluations. In this work, we present diffusion bridge implicit models (DBIMs) for accelerated sampling of diffusion bridges without extra training. We generalize DDBMs via a class of non-Markovian diffusion bridges defined on the discretized timesteps concerning sampling, which share the same training objective as DDBMs. These generalized diffusion bridges give rise to generative processes ranging from stochastic to deterministic (i.e., an implicit probabilistic model) while being up to 25$\times$ faster than the vanilla sampler of DDBMs. Moreover, the deterministic sampling procedure yielded by DBIMs enables faithful encoding and reconstruction by a booting noise used in the initial sampling step, and allows us to perform semantically meaningful interpolation in image translation tasks by regarding the booting noise as the latent variable.
PEAC: Unsupervised Pre-training for Cross-Embodiment Reinforcement Learning
May 23, 2024Designing generalizable agents capable of adapting to diverse embodiments has achieved significant attention in Reinforcement Learning (RL), which is critical for deploying RL agents in various real-world applications. Previous Cross-Embodiment RL approaches have focused on transferring knowledge across embodiments within specific tasks. These methods often result in knowledge tightly coupled with those tasks and fail to adequately capture the distinct characteristics of different embodiments. To address this limitation, we introduce the notion of Cross-Embodiment Unsupervised RL (CEURL), which leverages unsupervised learning to enable agents to acquire embodiment-aware and task-agnostic knowledge through online interactions within reward-free environments. We formulate CEURL as a novel Controlled Embodiment Markov Decision Process (CE-MDP) and systematically analyze CEURL's pre-training objectives under CE-MDP. Based on these analyses, we develop a novel algorithm Pre-trained Embodiment-Aware Control (PEAC) for handling CEURL, incorporating an intrinsic reward function specifically designed for cross-embodiment pre-training. PEAC not only provides an intuitive optimization strategy for cross-embodiment pre-training but also can integrate flexibly with existing unsupervised RL methods, facilitating cross-embodiment exploration and skill discovery. Extensive experiments in both simulated (e.g., DMC and Robosuite) and real-world environments (e.g., legged locomotion) demonstrate that PEAC significantly improves adaptation performance and cross-embodiment generalization, demonstrating its effectiveness in overcoming the unique challenges of CEURL.
Vidu: a Highly Consistent, Dynamic and Skilled Text-to-Video Generator with Diffusion Models
May 07, 2024



We introduce Vidu, a high-performance text-to-video generator that is capable of producing 1080p videos up to 16 seconds in a single generation. Vidu is a diffusion model with U-ViT as its backbone, which unlocks the scalability and the capability for handling long videos. Vidu exhibits strong coherence and dynamism, and is capable of generating both realistic and imaginative videos, as well as understanding some professional photography techniques, on par with Sora -- the most powerful reported text-to-video generator. Finally, we perform initial experiments on other controllable video generation, including canny-to-video generation, video prediction and subject-driven generation, which demonstrate promising results.
MicroDreamer: Zero-shot 3D Generation in $\sim$20 Seconds by Score-based Iterative Reconstruction
Apr 30, 2024



Optimization-based approaches, such as score distillation sampling (SDS), show promise in zero-shot 3D generation but suffer from low efficiency, primarily due to the high number of function evaluations (NFEs) required for each sample. In this paper, we introduce score-based iterative reconstruction (SIR), an efficient and general algorithm for 3D generation with a multi-view score-based diffusion model. Given the images produced by the diffusion model, SIR reduces NFEs by repeatedly optimizing 3D parameters, unlike the single optimization in SDS, mimicking the 3D reconstruction process. With other improvements including optimization in the pixel space, we present an efficient approach called MicroDreamer that generally applies to various 3D representations and 3D generation tasks. In particular, retaining a comparable performance, MicroDreamer is 5-20 times faster than SDS in generating neural radiance field and takes about 20 seconds to generate meshes from 3D Gaussian splitting on a single A100 GPU, halving the time of the fastest zero-shot baseline, DreamGaussian. Our code is available at https://github.com/ML-GSAI/MicroDreamer.