 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStage-Aware and Roughness-Constrained Diffusion Policy for Multi-Stage Robotic Polishing
Jun 24, 2026Polishing is a critical finishing process in high-end manufacturing fields such as aerospace, where surface quality directly affects the service performance and reliability of components. Robotic imitation learning provides a flexible solution for such tasks, but current methods remain limited in industrial polishing because of long-horizon dependencies, uncertain stage transitions, and the difficulty of modeling and regulating coupled process parameters. To address these issues, this paper proposes a Stage-Aware and Roughness-Constrained Diffusion Policy (SRDP) for robotic polishing. SRDP infers the process-stage posterior from multimodal observation histories and uses it to condition the shared reverse denoising process, enabling stage-consistent action generation without external stage labels during execution. Furthermore, a roughness-oriented process-constrained diffusion sampling method is incorporated to generate constrained feed speed and normal contact force under stage-wise preset spindle speeds, thereby improving process consistency and physical feasibility. Systematic experiments are conducted on two representative scenarios, namely spacecraft cabin coating-surface polishing and inner-cavity structural surface finishing. Comparisons with advanced baselines, ablation studies, and real-robot validations comprehensively evaluate the proposed method. The results show that SRD improves stage-transition stability, process-parameter consistency, and final surface quality across different polishing scenarios.
DataShield: Safety-degrading Data Filtering for LLM Benign Instruction Fine-Tuning
May 29, 2026Large language models (LLMs) suffer from degraded safety capabilities even when fine-tuned with benign datasets. However, existing methods for identifying safety-degrading samples in benign datasets suffer from high computational costs and significant noise issues. In this paper, we propose DataShield to efficiently and effectively identify potential safety-degrading samples. Our key intuition is based on the observation that benign fine-tuning increases the overall response compliance of LLMs. DataShield's key technical insight is to quantify each sample's contribution to the model's compliance behavior as its safety degradation score. DataShield consists of three core components: (1) Compliance Vector Extraction, which captures the LLM's compliance behavior tendency; (2) a novel Compliance-Aware Score (CAS), which automatically identifies the optimal safety-critical layer; and (3) Safety-degrading Sample Filtering, which quantifies the projection shift of training data along the compliance direction. Extensive experimental evaluation on Llama3-8B, Llama3.1-8B, and Qwen2.5-7B using the Alpaca and Dolly benign datasets validates our method's effectiveness in identifying high-risk and low-risk data subsets. We also observe that open-ended question answering is more likely to trigger safety degradation, and corresponding responses tend to be longer. We hope this work can provide new insights into data-centric defense methods. The source code is available at: https://github.com/ZJunBo/DataShield.
Surface Constraint Policy for Learning Surface-Constrained and Dynamically Feasible Robot Skills
May 29, 2026Diffusion-based imitation learning methods have driven rapid progress in robot dexterous manipulation tasks. However, they have limitations when applied to tasks that involve complex free-form surface constraints because of their lack of explicit surface geometry constraint modeling and the dynamic feasibility issue, resulting in stochastic action generation that fails to achieve reliable surface alignment and maintain stable contact. To address these limitations, we propose a novel surface constraint policy (SCP) for generating robot actions that satisfy free-form surface constraints on the basis of human demonstrations and real-time visual observations. First, the surface geometry constraint is encoded using a two-dimensional weighted Gaussian kernel function that is derived from demonstrations. Building on the encoded surface geometry constraints, the diffusion-based policy is used to infer task-level action intentions from multimodal sensory inputs, including visual observations and robot state feedback. These intentions are further transformed into surface-constrained dynamic movement primitives (DMPs) through a similarity-based action mapping method, thereby enabling smooth and compliant motion execution. The SCP achieves generation of structured surface geometric intent and dynamically admissible actions. The proposed method is validated on multiple surface manipulation tasks and compared with existing techniques. The experimental results demonstrate superior task success rates and contact stability under surface constraints.
HCOMC: A Hierarchical Cooperative On-Ramp Merging Control Framework in Mixed Traffic Environment on Two-Lane Highways
Jul 15, 2025Highway on-ramp merging areas are common bottlenecks to traffic congestion and accidents. Currently, a cooperative control strategy based on connected and automated vehicles (CAVs) is a fundamental solution to this problem. While CAVs are not fully widespread, it is necessary to propose a hierarchical cooperative on-ramp merging control (HCOMC) framework for heterogeneous traffic flow on two-lane highways to address this gap. This paper extends longitudinal car-following models based on the intelligent driver model and lateral lane-changing models using the quintic polynomial curve to account for human-driven vehicles (HDVs) and CAVs, comprehensively considering human factors and cooperative adaptive cruise control. Besides, this paper proposes a HCOMC framework, consisting of a hierarchical cooperative planning model based on the modified virtual vehicle model, a discretionary lane-changing model based on game theory, and a multi-objective optimization model using the elitist non-dominated sorting genetic algorithm to ensure the safe, smooth, and efficient merging process. Then, the performance of our HCOMC is analyzed under different traffic densities and CAV penetration rates through simulation. The findings underscore our HCOMC's pronounced comprehensive advantages in enhancing the safety of group vehicles, stabilizing and expediting merging process, optimizing traffic efficiency, and economizing fuel consumption compared with benchmarks.
Trust-MARL: Trust-Based Multi-Agent Reinforcement Learning Framework for Cooperative On-Ramp Merging Control in Heterogeneous Traffic Flow
Jun 14, 2025



Intelligent transportation systems require connected and automated vehicles (CAVs) to conduct safe and efficient cooperation with human-driven vehicles (HVs) in complex real-world traffic environments. However, the inherent unpredictability of human behaviour, especially at bottlenecks such as highway on-ramp merging areas, often disrupts traffic flow and compromises system performance. To address the challenge of cooperative on-ramp merging in heterogeneous traffic environments, this study proposes a trust-based multi-agent reinforcement learning (Trust-MARL) framework. At the macro level, Trust-MARL enhances global traffic efficiency by leveraging inter-agent trust to improve bottleneck throughput and mitigate traffic shockwave through emergent group-level coordination. At the micro level, a dynamic trust mechanism is designed to enable CAVs to adjust their cooperative strategies in response to real-time behaviors and historical interactions with both HVs and other CAVs. Furthermore, a trust-triggered game-theoretic decision-making module is integrated to guide each CAV in adapting its cooperation factor and executing context-aware lane-changing decisions under safety, comfort, and efficiency constraints. An extensive set of ablation studies and comparative experiments validates the effectiveness of the proposed Trust-MARL approach, demonstrating significant improvements in safety, efficiency, comfort, and adaptability across varying CAV penetration rates and traffic densities.
Integrating Large Language Models with Human Expertise for Disease Detection in Electronic Health Records
Mar 31, 2025Objective: Electronic health records (EHR) are widely available to complement administrative data-based disease surveillance and healthcare performance evaluation. Defining conditions from EHR is labour-intensive and requires extensive manual labelling of disease outcomes. This study developed an efficient strategy based on advanced large language models to identify multiple conditions from EHR clinical notes. Methods: We linked a cardiac registry cohort in 2015 with an EHR system in Alberta, Canada. We developed a pipeline that leveraged a generative large language model (LLM) to analyze, understand, and interpret EHR notes by prompts based on specific diagnosis, treatment management, and clinical guidelines. The pipeline was applied to detect acute myocardial infarction (AMI), diabetes, and hypertension. The performance was compared against clinician-validated diagnoses as the reference standard and widely adopted International Classification of Diseases (ICD) codes-based methods. Results: The study cohort accounted for 3,088 patients and 551,095 clinical notes. The prevalence was 55.4%, 27.7%, 65.9% and for AMI, diabetes, and hypertension, respectively. The performance of the LLM-based pipeline for detecting conditions varied: AMI had 88% sensitivity, 63% specificity, and 77% positive predictive value (PPV); diabetes had 91% sensitivity, 86% specificity, and 71% PPV; and hypertension had 94% sensitivity, 32% specificity, and 72% PPV. Compared with ICD codes, the LLM-based method demonstrated improved sensitivity and negative predictive value across all conditions. The monthly percentage trends from the detected cases by LLM and reference standard showed consistent patterns.
Machine learning for modelling unstructured grid data in computational physics: a review
Feb 13, 2025
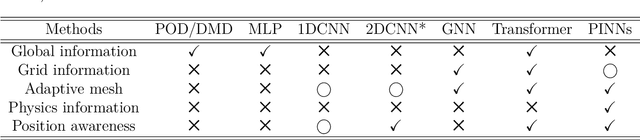
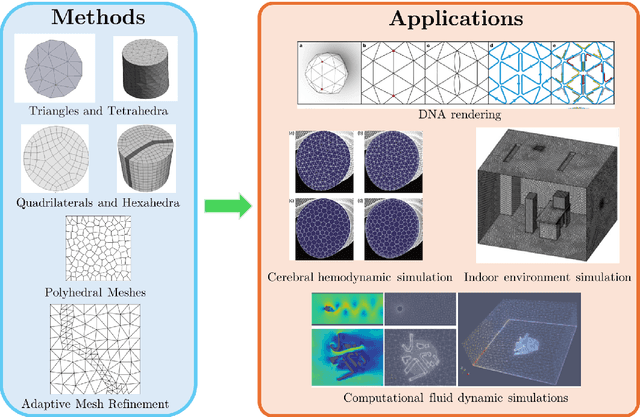
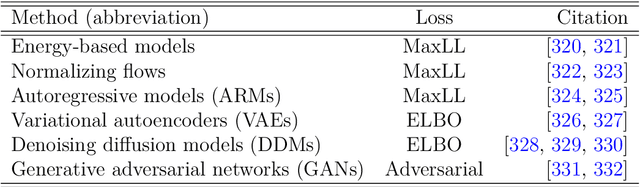
Unstructured grid data are essential for modelling complex geometries and dynamics in computational physics. Yet, their inherent irregularity presents significant challenges for conventional machine learning (ML) techniques. This paper provides a comprehensive review of advanced ML methodologies designed to handle unstructured grid data in high-dimensional dynamical systems. Key approaches discussed include graph neural networks, transformer models with spatial attention mechanisms, interpolation-integrated ML methods, and meshless techniques such as physics-informed neural networks. These methodologies have proven effective across diverse fields, including fluid dynamics and environmental simulations. This review is intended as a guidebook for computational scientists seeking to apply ML approaches to unstructured grid data in their domains, as well as for ML researchers looking to address challenges in computational physics. It places special focus on how ML methods can overcome the inherent limitations of traditional numerical techniques and, conversely, how insights from computational physics can inform ML development. To support benchmarking, this review also provides a summary of open-access datasets of unstructured grid data in computational physics. Finally, emerging directions such as generative models with unstructured data, reinforcement learning for mesh generation, and hybrid physics-data-driven paradigms are discussed to inspire future advancements in this evolving field.
Graph Structure Learning for Tumor Microenvironment with Cell Type Annotation from non-spatial scRNA-seq data
Feb 04, 2025The exploration of cellular heterogeneity within the tumor microenvironment (TME) via single-cell RNA sequencing (scRNA-seq) is essential for understanding cancer progression and response to therapy. Current scRNA-seq approaches, however, lack spatial context and rely on incomplete datasets of ligand-receptor interactions (LRIs), limiting accurate cell type annotation and cell-cell communication (CCC) inference. This study addresses these challenges using a novel graph neural network (GNN) model that enhances cell type prediction and cell interaction analysis. Our study utilized a dataset consisting of 49,020 cells from 19 patients across three cancer types: Leukemia, Breast Invasive Carcinoma, and Colorectal Cancer. The proposed scGSL model demonstrated robust performance, achieving an average accuracy of 84.83%, precision of 86.23%, recall of 81.51%, and an F1 score of 80.92% across all datasets. These metrics represent a significant enhancement over existing methods, which typically exhibit lower performance metrics. Additionally, by reviewing existing literature on gene interactions within the TME, the scGSL model proves to robustly identify biologically meaningful gene interactions in an unsupervised manner, validated by significant expression differences in key gene pairs across various cancers. The source code and data used in this paper can be found in https://github.com/LiYuechao1998/scGSL.
Reinforcement learning for automatic quadrilateral mesh generation: a soft actor-critic approach
Mar 19, 2022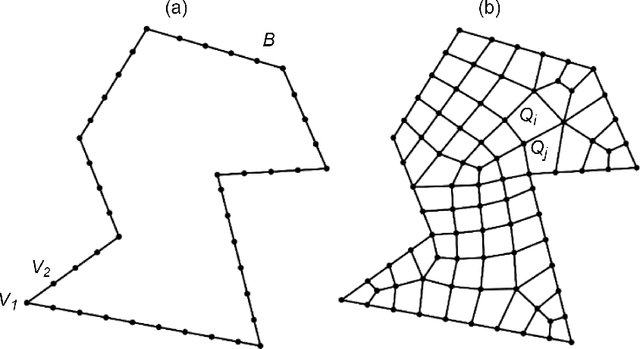
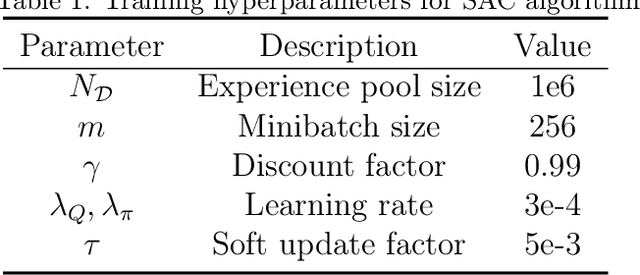
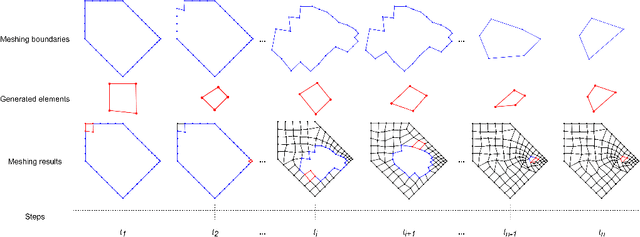
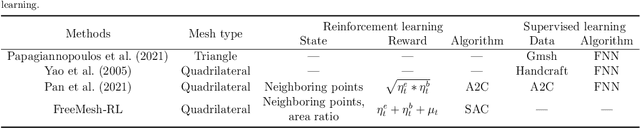
This paper proposes, implements, and evaluates a Reinforcement Learning (RL) based computational framework for automatic mesh generation. Mesh generation, as one of six basic research directions identified in NASA Vision 2030, is an important area in computational geometry and plays a fundamental role in numerical simulations in the area of finite element analysis (FEA) and computational fluid dynamics (CFD). Existing mesh generation methods suffer from high computational complexity, low mesh quality in complex geometries, and speed limitations. By formulating the mesh generation as a Markov decision process (MDP) problem, we are able to use soft actor-critic, a state-of-the-art RL algorithm, to learn the meshing agent's policy from trials automatically, and achieve a fully automatic mesh generation system without human intervention and any extra clean-up operations, which are typically needed in current commercial software. In our experiments and comparison with a number of representative commercial software, our system demonstrates promising performance with respect to generalizability, robustness, and effectiveness.
RAPTOR: Robust and Perception-aware Trajectory Replanning for Quadrotor Fast Flight
Jul 06, 2020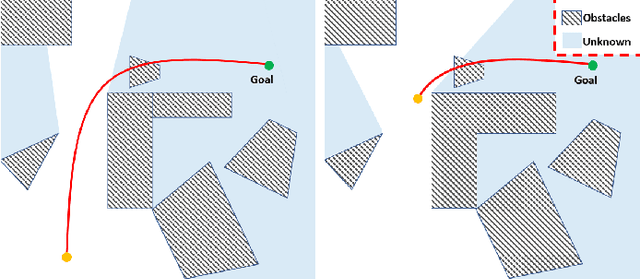
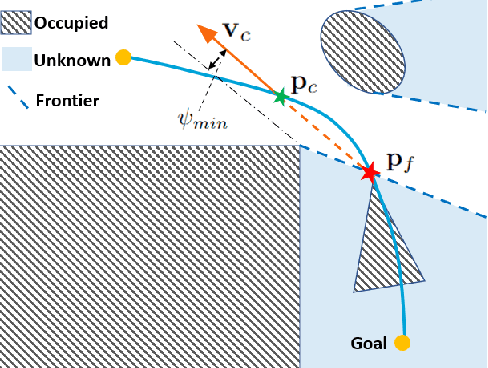
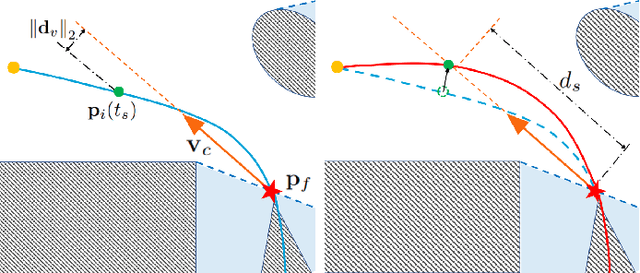
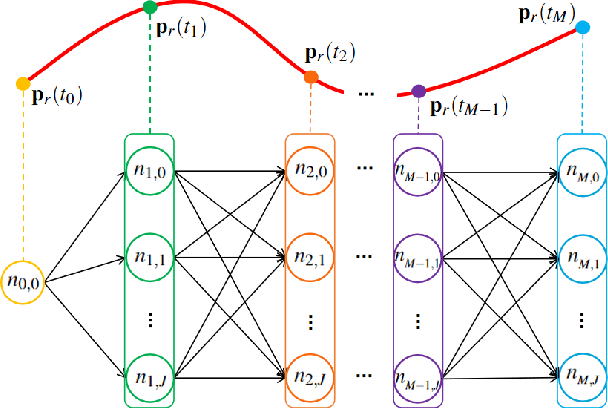
Recent advances in trajectory replanning have enabled quadrotor to navigate autonomously in unknown environments. However, high-speed navigation still remains a significant challenge. Given very limited time, existing methods have no strong guarantee on the feasibility or quality of the solutions. Moreover, most methods do not consider environment perception, which is the key bottleneck to fast flight. In this paper, we present RAPTOR, a robust and perception-aware replanning framework to support fast and safe flight. A path-guided optimization (PGO) approach that incorporates multiple topological paths is devised, to ensure finding feasible and high-quality trajectories in very limited time. We also introduce a perception-aware planning strategy to actively observe and avoid unknown obstacles. A risk-aware trajectory refinement ensures that unknown obstacles which may endanger the quadrotor can be observed earlier and avoid in time. The motion of yaw angle is planned to actively explore the surrounding space that is relevant for safe navigation. The proposed methods are tested extensively. We will release our implementation as an open-source package for the community.