 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMIPI 2024 Challenge on Demosaic for HybridEVS Camera: Methods and Results
May 08, 2024



The increasing demand for computational photography and imaging on mobile platforms has led to the widespread development and integration of advanced image sensors with novel algorithms in camera systems. However, the scarcity of high-quality data for research and the rare opportunity for in-depth exchange of views from industry and academia constrain the development of mobile intelligent photography and imaging (MIPI). Building on the achievements of the previous MIPI Workshops held at ECCV 2022 and CVPR 2023, we introduce our third MIPI challenge including three tracks focusing on novel image sensors and imaging algorithms. In this paper, we summarize and review the Nighttime Flare Removal track on MIPI 2024. In total, 170 participants were successfully registered, and 14 teams submitted results in the final testing phase. The developed solutions in this challenge achieved state-of-the-art performance on Nighttime Flare Removal. More details of this challenge and the link to the dataset can be found at https://mipi-challenge.org/MIPI2024/.
Deep RAW Image Super-Resolution. A NTIRE 2024 Challenge Survey
Apr 24, 2024



This paper reviews the NTIRE 2024 RAW Image Super-Resolution Challenge, highlighting the proposed solutions and results. New methods for RAW Super-Resolution could be essential in modern Image Signal Processing (ISP) pipelines, however, this problem is not as explored as in the RGB domain. Th goal of this challenge is to upscale RAW Bayer images by 2x, considering unknown degradations such as noise and blur. In the challenge, a total of 230 participants registered, and 45 submitted results during thee challenge period. The performance of the top-5 submissions is reviewed and provided here as a gauge for the current state-of-the-art in RAW Image Super-Resolution.
NTIRE 2024 Challenge on Image Super-Resolution ($\times$4): Methods and Results
Apr 15, 2024



This paper reviews the NTIRE 2024 challenge on image super-resolution ($\times$4), highlighting the solutions proposed and the outcomes obtained. The challenge involves generating corresponding high-resolution (HR) images, magnified by a factor of four, from low-resolution (LR) inputs using prior information. The LR images originate from bicubic downsampling degradation. The aim of the challenge is to obtain designs/solutions with the most advanced SR performance, with no constraints on computational resources (e.g., model size and FLOPs) or training data. The track of this challenge assesses performance with the PSNR metric on the DIV2K testing dataset. The competition attracted 199 registrants, with 20 teams submitting valid entries. This collective endeavour not only pushes the boundaries of performance in single-image SR but also offers a comprehensive overview of current trends in this field.
Immersive 3D Simulator for Drone-as-a-Service
Oct 29, 2023



We propose a 3D simulator tailored for the Drone-as-a-Service framework. The simulator enables employing dynamic algorithms for addressing realistic delivery scenarios. We present the simulator's architectural design and its use of an energy consumption model for drone deliveries. We introduce two primary operational modes within the simulator: the edit mode and the runtime mode. Beyond its simulation capabilities, our simulator serves as a valuable data collection resource, facilitating the creation of datasets through simulated scenarios. Our simulator empowers researchers by providing an intuitive platform to visualize and interact with delivery environments. Moreover, it enables rigorous algorithm testing in a safe simulation setting, thus obviating the need for real-world drone deployments. Demo: https://youtu.be/HOLfo1JiFJ0
AIM 2020 Challenge on Rendering Realistic Bokeh
Nov 10, 2020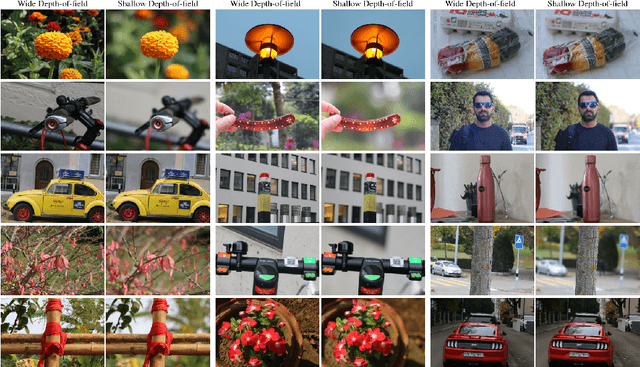
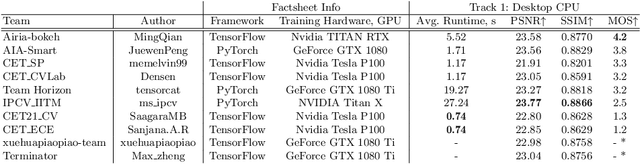

This paper reviews the second AIM realistic bokeh effect rendering challenge and provides the description of the proposed solutions and results. The participating teams were solving a real-world bokeh simulation problem, where the goal was to learn a realistic shallow focus technique using a large-scale EBB! bokeh dataset consisting of 5K shallow / wide depth-of-field image pairs captured using the Canon 7D DSLR camera. The participants had to render bokeh effect based on only one single frame without any additional data from other cameras or sensors. The target metric used in this challenge combined the runtime and the perceptual quality of the solutions measured in the user study. To ensure the efficiency of the submitted models, we measured their runtime on standard desktop CPUs as well as were running the models on smartphone GPUs. The proposed solutions significantly improved the baseline results, defining the state-of-the-art for practical bokeh effect rendering problem.
BGGAN: Bokeh-Glass Generative Adversarial Network for Rendering Realistic Bokeh
Nov 04, 2020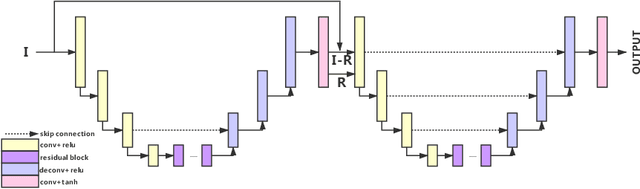
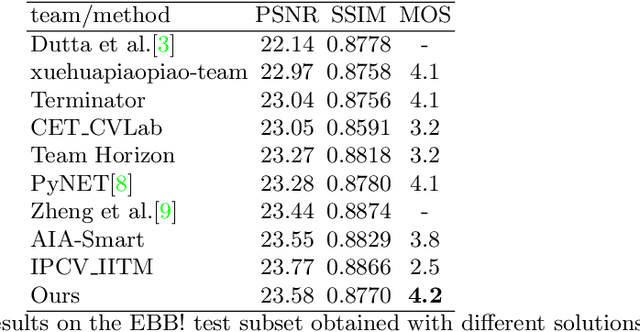
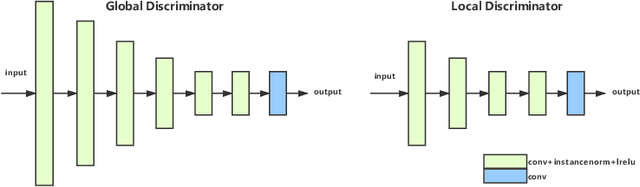
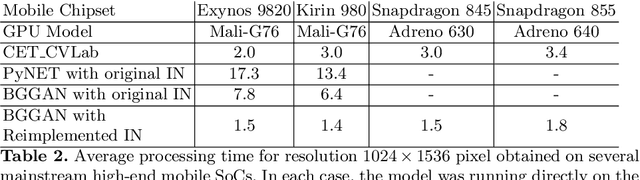
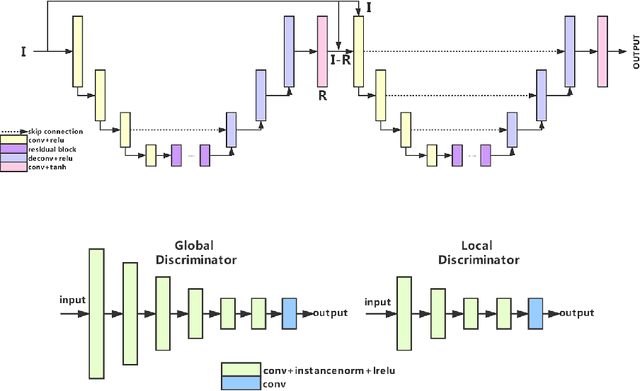
A photo captured with bokeh effect often means objects in focus are sharp while the out-of-focus areas are all blurred. DSLR can easily render this kind of effect naturally. However, due to the limitation of sensors, smartphones cannot capture images with depth-of-field effects directly. In this paper, we propose a novel generator called Glass-Net, which generates bokeh images not relying on complex hardware. Meanwhile, the GAN-based method and perceptual loss are combined for rendering a realistic bokeh effect in the stage of finetuning the model. Moreover, Instance Normalization(IN) is reimplemented in our network, which ensures our tflite model with IN can be accelerated on smartphone GPU. Experiments show that our method is able to render a high-quality bokeh effect and process one $1024 \times 1536$ pixel image in 1.9 seconds on all smartphone chipsets. This approach ranked First in AIM 2020 Rendering Realistic Bokeh Challenge Track 1 \& Track 2.