 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast Inference and Transfer of Compositional Task Structures for Few-shot Task Generalization
May 25, 2022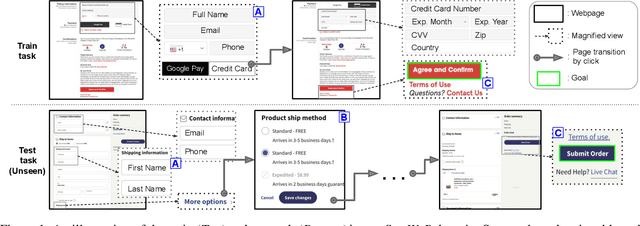
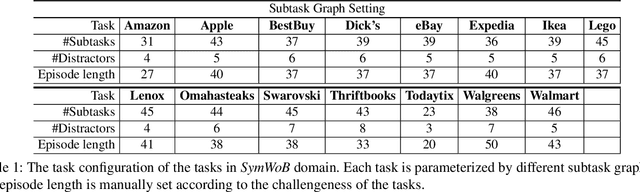
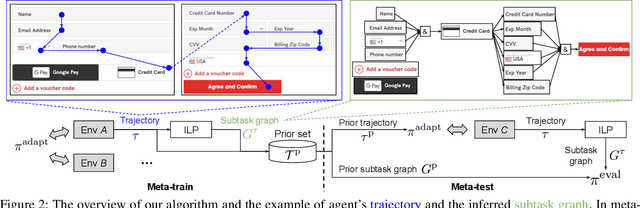

We tackle real-world problems with complex structures beyond the pixel-based game or simulator. We formulate it as a few-shot reinforcement learning problem where a task is characterized by a subtask graph that defines a set of subtasks and their dependencies that are unknown to the agent. Different from the previous meta-rl methods trying to directly infer the unstructured task embedding, our multi-task subtask graph inferencer (MTSGI) first infers the common high-level task structure in terms of the subtask graph from the training tasks, and use it as a prior to improve the task inference in testing. Our experiment results on 2D grid-world and complex web navigation domains show that the proposed method can learn and leverage the common underlying structure of the tasks for faster adaptation to the unseen tasks than various existing algorithms such as meta reinforcement learning, hierarchical reinforcement learning, and other heuristic agents.
RiCS: A 2D Self-Occlusion Map for Harmonizing Volumetric Objects
May 14, 2022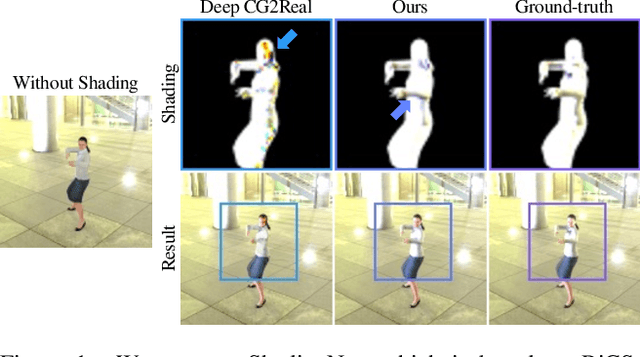
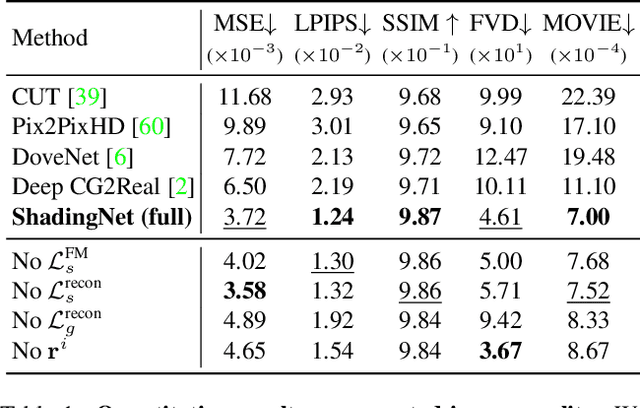
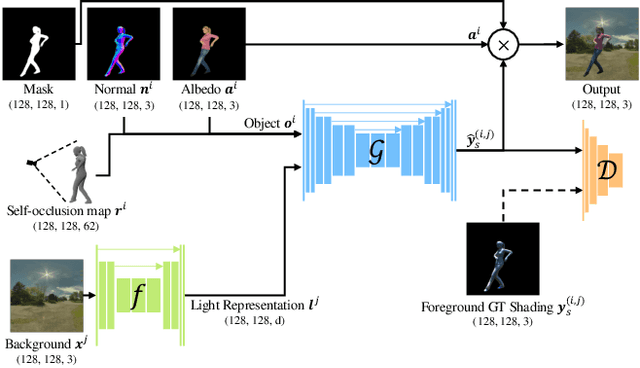
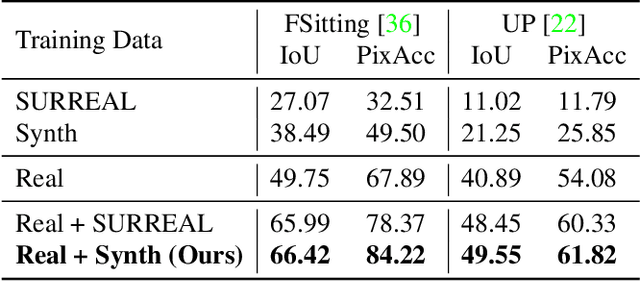
There have been remarkable successes in computer vision with deep learning. While such breakthroughs show robust performance, there have still been many challenges in learning in-depth knowledge, like occlusion or predicting physical interactions. Although some recent works show the potential of 3D data in serving such context, it is unclear how we efficiently provide 3D input to the 2D models due to the misalignment in dimensionality between 2D and 3D. To leverage the successes of 2D models in predicting self-occlusions, we design Ray-marching in Camera Space (RiCS), a new method to represent the self-occlusions of foreground objects in 3D into a 2D self-occlusion map. We test the effectiveness of our representation on the human image harmonization task by predicting shading that is coherent with a given background image. Our experiments demonstrate that our representation map not only allows us to enhance the image quality but also to model temporally coherent complex shadow effects compared with the simulation-to-real and harmonization methods, both quantitatively and qualitatively. We further show that we can significantly improve the performance of human parts segmentation networks trained on existing synthetic datasets by enhancing the harmonization quality with our method.
Simple and Effective Synthesis of Indoor 3D Scenes
Apr 06, 2022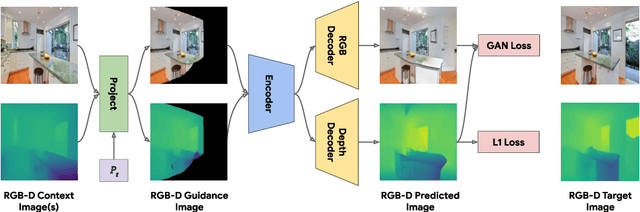
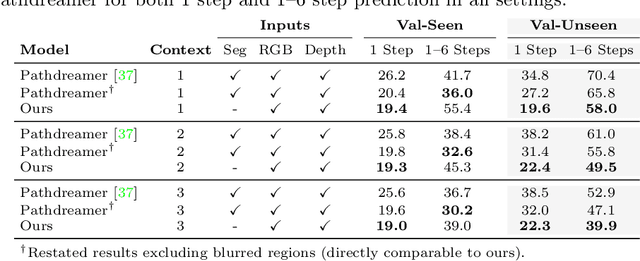

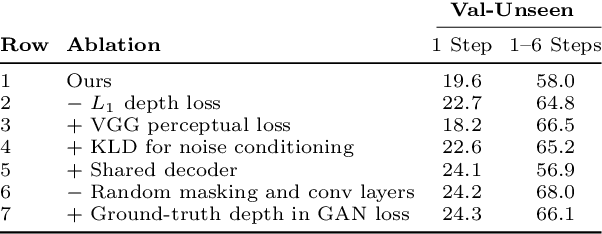
We study the problem of synthesizing immersive 3D indoor scenes from one or more images. Our aim is to generate high-resolution images and videos from novel viewpoints, including viewpoints that extrapolate far beyond the input images while maintaining 3D consistency. Existing approaches are highly complex, with many separately trained stages and components. We propose a simple alternative: an image-to-image GAN that maps directly from reprojections of incomplete point clouds to full high-resolution RGB-D images. On the Matterport3D and RealEstate10K datasets, our approach significantly outperforms prior work when evaluated by humans, as well as on FID scores. Further, we show that our model is useful for generative data augmentation. A vision-and-language navigation (VLN) agent trained with trajectories spatially-perturbed by our model improves success rate by up to 1.5% over a state of the art baseline on the R2R benchmark. Our code will be made available to facilitate generative data augmentation and applications to downstream robotics and embodied AI tasks.
Learning Parameterized Task Structure for Generalization to Unseen Entities
Mar 28, 2022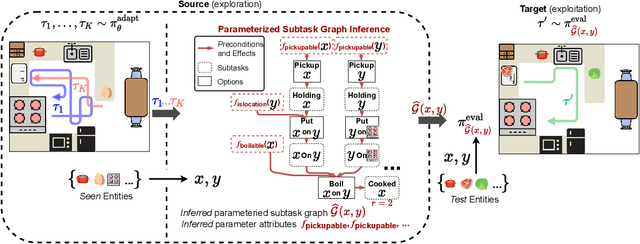
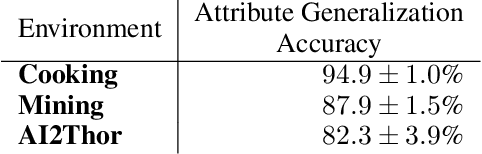

Real world tasks are hierarchical and compositional. Tasks can be composed of multiple subtasks (or sub-goals) that are dependent on each other. These subtasks are defined in terms of entities (e.g., "apple", "pear") that can be recombined to form new subtasks (e.g., "pickup apple", and "pickup pear"). To solve these tasks efficiently, an agent must infer subtask dependencies (e.g. an agent must execute "pickup apple" before "place apple in pot"), and generalize the inferred dependencies to new subtasks (e.g. "place apple in pot" is similar to "place apple in pan"). Moreover, an agent may also need to solve unseen tasks, which can involve unseen entities. To this end, we formulate parameterized subtask graph inference (PSGI), a method for modeling subtask dependencies using first-order logic with subtask entities. To facilitate this, we learn entity attributes in a zero-shot manner, which are used as quantifiers (e.g. "is_pickable(X)") for the parameterized subtask graph. We show this approach accurately learns the latent structure on hierarchical and compositional tasks more efficiently than prior work, and show PSGI can generalize by modelling structure on subtasks unseen during adaptation.
SURF: Semi-supervised Reward Learning with Data Augmentation for Feedback-efficient Preference-based Reinforcement Learning
Mar 18, 2022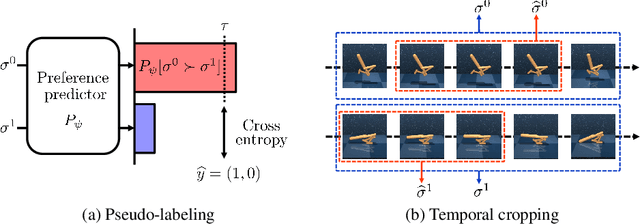
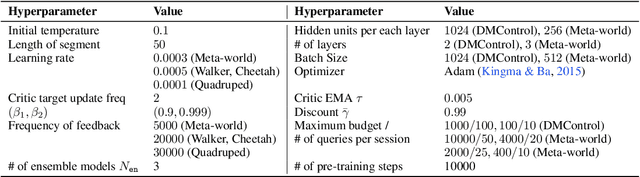
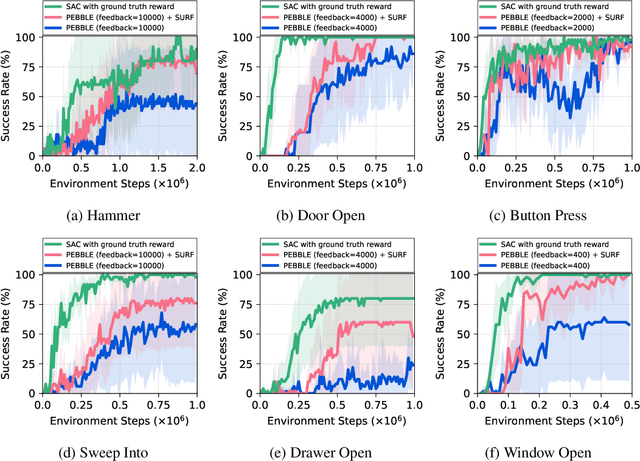
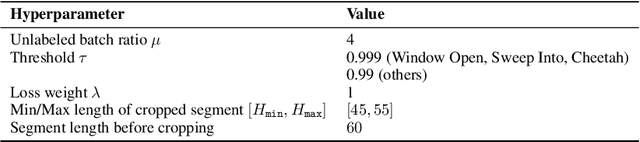
Preference-based reinforcement learning (RL) has shown potential for teaching agents to perform the target tasks without a costly, pre-defined reward function by learning the reward with a supervisor's preference between the two agent behaviors. However, preference-based learning often requires a large amount of human feedback, making it difficult to apply this approach to various applications. This data-efficiency problem, on the other hand, has been typically addressed by using unlabeled samples or data augmentation techniques in the context of supervised learning. Motivated by the recent success of these approaches, we present SURF, a semi-supervised reward learning framework that utilizes a large amount of unlabeled samples with data augmentation. In order to leverage unlabeled samples for reward learning, we infer pseudo-labels of the unlabeled samples based on the confidence of the preference predictor. To further improve the label-efficiency of reward learning, we introduce a new data augmentation that temporally crops consecutive subsequences from the original behaviors. Our experiments demonstrate that our approach significantly improves the feedback-efficiency of the state-of-the-art preference-based method on a variety of locomotion and robotic manipulation tasks.
Rich CNN-Transformer Feature Aggregation Networks for Super-Resolution
Mar 16, 2022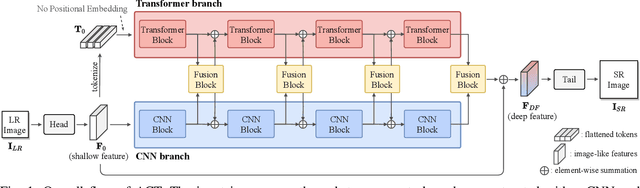
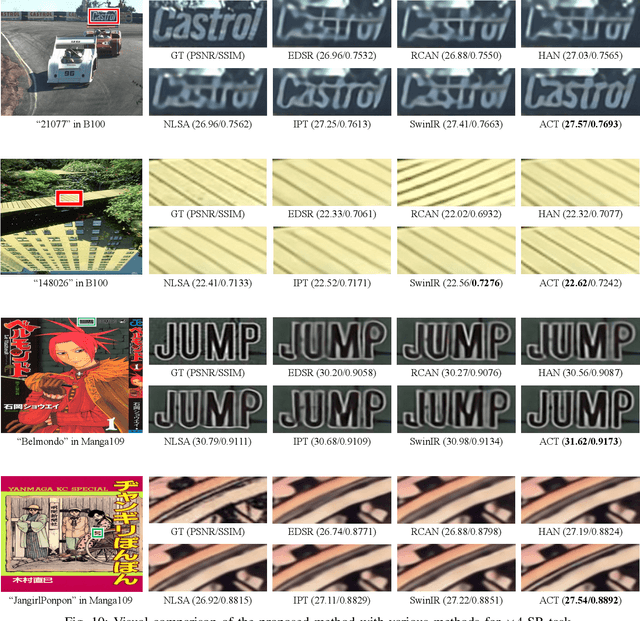
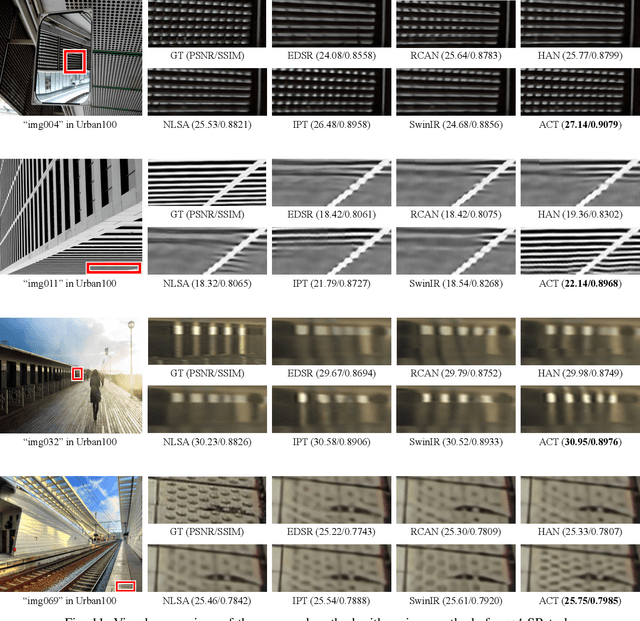
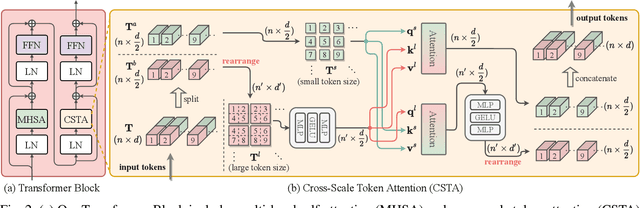
Recent vision transformers along with self-attention have achieved promising results on various computer vision tasks. In particular, a pure transformer-based image restoration architecture surpasses the existing CNN-based methods using multi-task pre-training with a large number of trainable parameters. In this paper, we introduce an effective hybrid architecture for super-resolution (SR) tasks, which leverages local features from CNNs and long-range dependencies captured by transformers to further improve the SR results. Specifically, our architecture comprises of transformer and convolution branches, and we substantially elevate the performance by mutually fusing two branches to complement each representation. Furthermore, we propose a cross-scale token attention module, which allows the transformer to efficiently exploit the informative relationships among tokens across different scales. Our proposed method achieves state-of-the-art SR results on numerous benchmark datasets.
Lipschitz-constrained Unsupervised Skill Discovery
Feb 08, 2022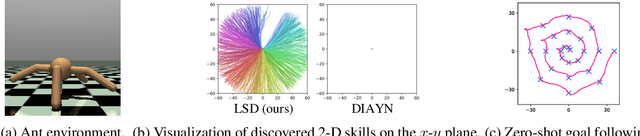
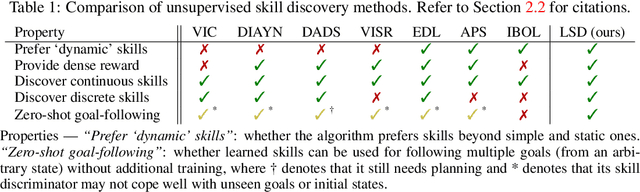
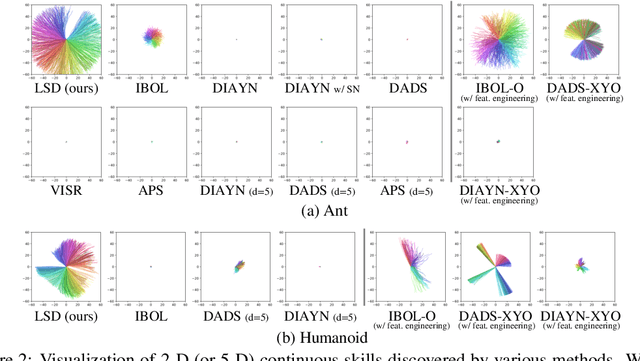
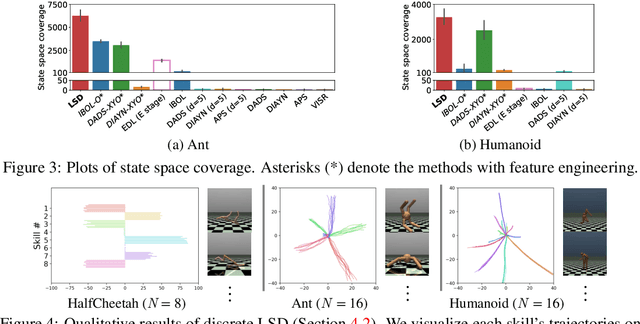
We study the problem of unsupervised skill discovery, whose goal is to learn a set of diverse and useful skills with no external reward. There have been a number of skill discovery methods based on maximizing the mutual information (MI) between skills and states. However, we point out that their MI objectives usually prefer static skills to dynamic ones, which may hinder the application for downstream tasks. To address this issue, we propose Lipschitz-constrained Skill Discovery (LSD), which encourages the agent to discover more diverse, dynamic, and far-reaching skills. Another benefit of LSD is that its learned representation function can be utilized for solving goal-following downstream tasks even in a zero-shot manner - i.e., without further training or complex planning. Through experiments on various MuJoCo robotic locomotion and manipulation environments, we demonstrate that LSD outperforms previous approaches in terms of skill diversity, state space coverage, and performance on seven downstream tasks including the challenging task of following multiple goals on Humanoid. Our code and videos are available at https://shpark.me/projects/lsd/.
Environment Generation for Zero-Shot Compositional Reinforcement Learning
Jan 21, 2022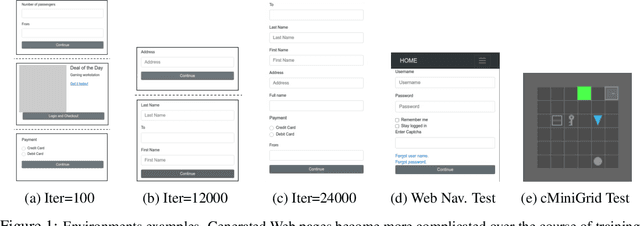
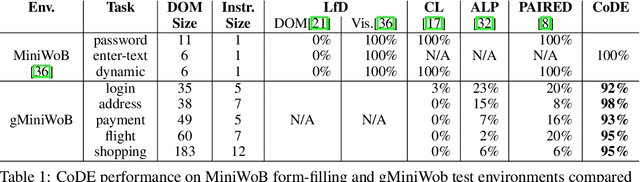

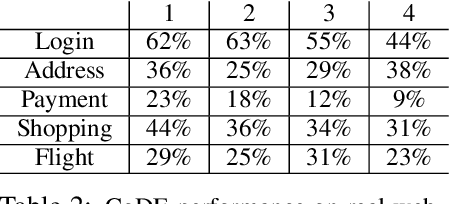
Many real-world problems are compositional - solving them requires completing interdependent sub-tasks, either in series or in parallel, that can be represented as a dependency graph. Deep reinforcement learning (RL) agents often struggle to learn such complex tasks due to the long time horizons and sparse rewards. To address this problem, we present Compositional Design of Environments (CoDE), which trains a Generator agent to automatically build a series of compositional tasks tailored to the RL agent's current skill level. This automatic curriculum not only enables the agent to learn more complex tasks than it could have otherwise, but also selects tasks where the agent's performance is weak, enhancing its robustness and ability to generalize zero-shot to unseen tasks at test-time. We analyze why current environment generation techniques are insufficient for the problem of generating compositional tasks, and propose a new algorithm that addresses these issues. Our results assess learning and generalization across multiple compositional tasks, including the real-world problem of learning to navigate and interact with web pages. We learn to generate environments composed of multiple pages or rooms, and train RL agents capable of completing wide-range of complex tasks in those environments. We contribute two new benchmark frameworks for generating compositional tasks, compositional MiniGrid and gMiniWoB for web navigation.CoDE yields 4x higher success rate than the strongest baseline, and demonstrates strong performance of real websites learned on 3500 primitive tasks.
L-Verse: Bidirectional Generation Between Image and Text
Dec 03, 2021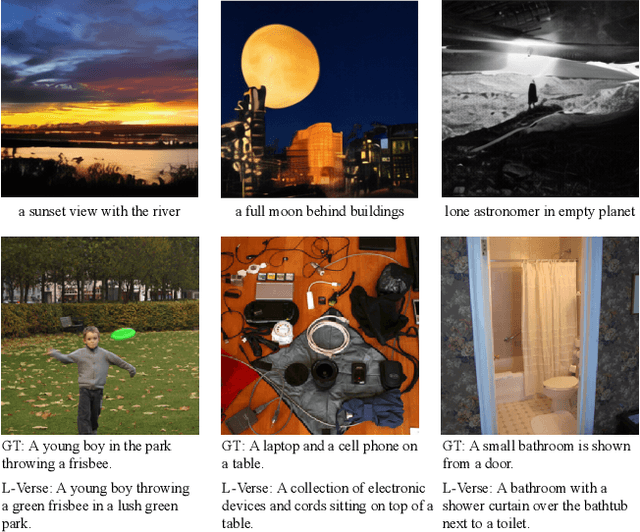
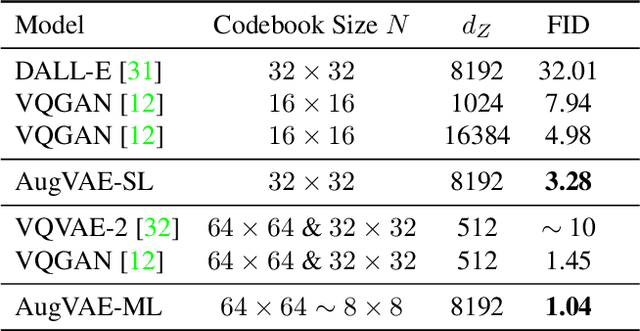
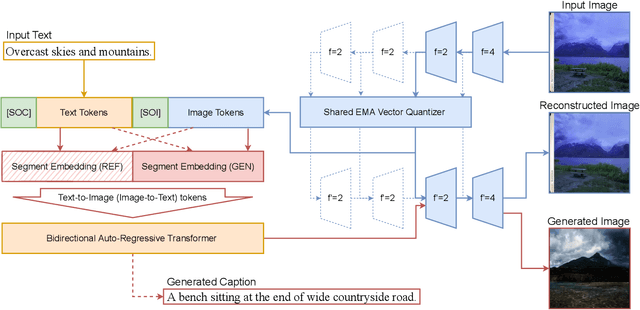
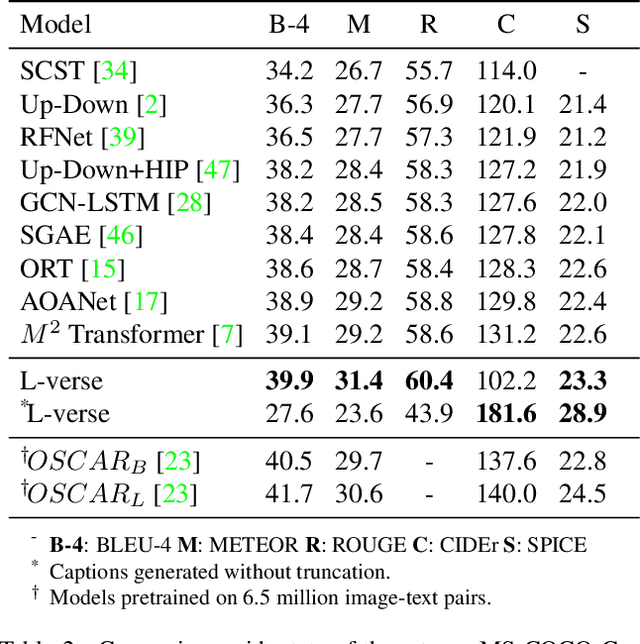
Far beyond learning long-range interactions of natural language, transformers are becoming the de-facto standard for many vision tasks with their power and scalabilty. Especially with cross-modal tasks between image and text, vector quantized variational autoencoders (VQ-VAEs) are widely used to make a raw RGB image into a sequence of feature vectors. To better leverage the correlation between image and text, we propose L-Verse, a novel architecture consisting of feature-augmented variational autoencoder (AugVAE) and bidirectional auto-regressive transformer (BiART) for text-to-image and image-to-text generation. Our AugVAE shows the state-of-the-art reconstruction performance on ImageNet1K validation set, along with the robustness to unseen images in the wild. Unlike other models, BiART can distinguish between image (or text) as a conditional reference and a generation target. L-Verse can be directly used for image-to-text or text-to-image generation tasks without any finetuning or extra object detection frameworks. In quantitative and qualitative experiments, L-Verse shows impressive results against previous methods in both image-to-text and text-to-image generation on MS-COCO Captions. We furthermore assess the scalability of L-Verse architecture on Conceptual Captions and present the initial results of bidirectional vision-language representation learning on general domain.
Successor Feature Landmarks for Long-Horizon Goal-Conditioned Reinforcement Learning
Nov 18, 2021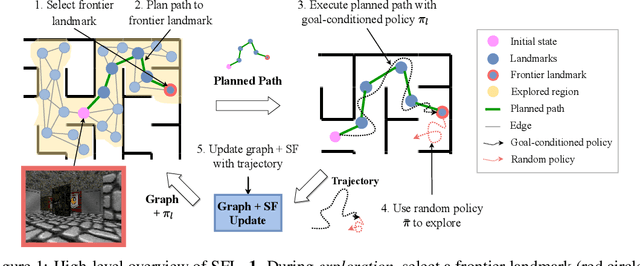
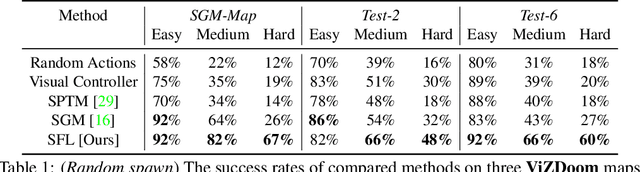
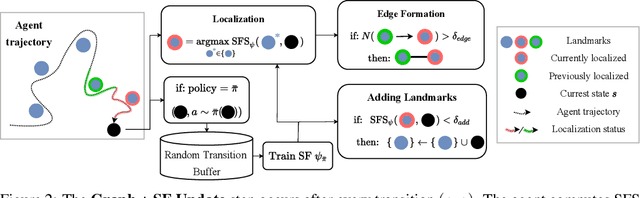
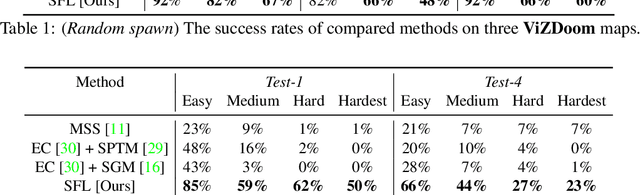
Operating in the real-world often requires agents to learn about a complex environment and apply this understanding to achieve a breadth of goals. This problem, known as goal-conditioned reinforcement learning (GCRL), becomes especially challenging for long-horizon goals. Current methods have tackled this problem by augmenting goal-conditioned policies with graph-based planning algorithms. However, they struggle to scale to large, high-dimensional state spaces and assume access to exploration mechanisms for efficiently collecting training data. In this work, we introduce Successor Feature Landmarks (SFL), a framework for exploring large, high-dimensional environments so as to obtain a policy that is proficient for any goal. SFL leverages the ability of successor features (SF) to capture transition dynamics, using it to drive exploration by estimating state-novelty and to enable high-level planning by abstracting the state-space as a non-parametric landmark-based graph. We further exploit SF to directly compute a goal-conditioned policy for inter-landmark traversal, which we use to execute plans to "frontier" landmarks at the edge of the explored state space. We show in our experiments on MiniGrid and ViZDoom that SFL enables efficient exploration of large, high-dimensional state spaces and outperforms state-of-the-art baselines on long-horizon GCRL tasks.