 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMorphologically Equivariant Flow Matching for Bimanual Mobile Manipulation
May 12, 2026Mobile manipulation requires coordinated control of high-dimensional, bimanual robots. Imitation learning methods have been broadly used to solve these robotic tasks, yet typically ignore the bilateral morphological symmetry inherent in such systems. We argue that morphological symmetry is an underexplored but crucial inductive bias for learning in bimanual mobile manipulation: knowing how to solve a task in one configuration directly determines how to solve its mirrored counterpart. In this paper, we formalize this symmetry prior and show that it constrains optimal bimanual policies to be ambidextrous and equivariant under reflections across the robot's sagittal plane. We introduce a $\mathbb{C}_2$-equivariant flow matching policy that enforces reflective symmetry either via a regularized training loss or an equivariant velocity network. Across planar and 6-DoF mobile manipulation tasks, symmetry-informed policies consistently improve sample efficiency and achieve zero-shot generalization to mirrored configurations absent from the training distribution. We further validate this zero-shot generalization capability on a real-world manipulation task with a TIAGo++ robot. Together, our findings establish morphological symmetry as an effective, generalizable, and scalable inductive bias for ambidextrous generative policy learning.
BinWalker: Development and Field Evaluation of a Quadruped Manipulator Platform for Sustainable Litter Collection
Mar 11, 2026Litter pollution represents a growing environmental problem affecting natural and urban ecosystems worldwide. Waste discarded in public spaces often accumulates in areas that are difficult to access, such as uneven terrains, coastal environments, parks, and roadside vegetation. Over time, these materials degrade and release harmful substances, including toxic chemicals and microplastics, which can contaminate soil and water and pose serious threats to wildlife and human health. Despite increasing awareness of the problem, litter collection is still largely performed manually by human operators, making large-scale cleanup operations labor-intensive, time-consuming, and costly. Robotic solutions have the potential to support and partially automate environmental cleanup tasks. In this work, we present a quadruped robotic system designed for autonomous litter collection in challenging outdoor scenarios. The robot combines the mobility advantages of legged locomotion with a manipulation system consisting of a robotic arm and an onboard litter container. This configuration enables the robot to detect, grasp, and store litter items while navigating through uneven terrains. The proposed system aims to demonstrate the feasibility of integrating perception, locomotion, and manipulation on a legged robotic platform for environmental cleanup tasks. Experimental evaluations conducted in outdoor scenarios highlight the effectiveness of the approach and its potential for assisting large-scale litter removal operations in environments that are difficult to reach with traditional robotic platforms. The code associated with this work can be found at: https://github.com/iit-DLSLab/trash-collection-isaaclab.
CroSTAta: Cross-State Transition Attention Transformer for Robotic Manipulation
Oct 01, 2025Learning robotic manipulation policies through supervised learning from demonstrations remains challenging when policies encounter execution variations not explicitly covered during training. While incorporating historical context through attention mechanisms can improve robustness, standard approaches process all past states in a sequence without explicitly modeling the temporal structure that demonstrations may include, such as failure and recovery patterns. We propose a Cross-State Transition Attention Transformer that employs a novel State Transition Attention (STA) mechanism to modulate standard attention weights based on learned state evolution patterns, enabling policies to better adapt their behavior based on execution history. Our approach combines this structured attention with temporal masking during training, where visual information is randomly removed from recent timesteps to encourage temporal reasoning from historical context. Evaluation in simulation shows that STA consistently outperforms standard cross-attention and temporal modeling approaches like TCN and LSTM networks across all tasks, achieving more than 2x improvement over cross-attention on precision-critical tasks.
Guided Reinforcement Learning for Omnidirectional 3D Jumping in Quadruped Robots
Jul 22, 2025Jumping poses a significant challenge for quadruped robots, despite being crucial for many operational scenarios. While optimisation methods exist for controlling such motions, they are often time-consuming and demand extensive knowledge of robot and terrain parameters, making them less robust in real-world scenarios. Reinforcement learning (RL) is emerging as a viable alternative, yet conventional end-to-end approaches lack efficiency in terms of sample complexity, requiring extensive training in simulations, and predictability of the final motion, which makes it difficult to certify the safety of the final motion. To overcome these limitations, this paper introduces a novel guided reinforcement learning approach that leverages physical intuition for efficient and explainable jumping, by combining B\'ezier curves with a Uniformly Accelerated Rectilinear Motion (UARM) model. Extensive simulation and experimental results clearly demonstrate the advantages of our approach over existing alternatives.
Feedback-MPPI: Fast Sampling-Based MPC via Rollout Differentiation -- Adios low-level controllers
Jun 17, 2025



Model Predictive Path Integral control is a powerful sampling-based approach suitable for complex robotic tasks due to its flexibility in handling nonlinear dynamics and non-convex costs. However, its applicability in real-time, highfrequency robotic control scenarios is limited by computational demands. This paper introduces Feedback-MPPI (F-MPPI), a novel framework that augments standard MPPI by computing local linear feedback gains derived from sensitivity analysis inspired by Riccati-based feedback used in gradient-based MPC. These gains allow for rapid closed-loop corrections around the current state without requiring full re-optimization at each timestep. We demonstrate the effectiveness of F-MPPI through simulations and real-world experiments on two robotic platforms: a quadrupedal robot performing dynamic locomotion on uneven terrain and a quadrotor executing aggressive maneuvers with onboard computation. Results illustrate that incorporating local feedback significantly improves control performance and stability, enabling robust, high-frequency operation suitable for complex robotic systems.
Primal-Dual iLQR for GPU-Accelerated Learning and Control in Legged Robots
Jun 09, 2025This paper introduces a novel Model Predictive Control (MPC) implementation for legged robot locomotion that leverages GPU parallelization. Our approach enables both temporal and state-space parallelization by incorporating a parallel associative scan to solve the primal-dual Karush-Kuhn-Tucker (KKT) system. In this way, the optimal control problem is solved in $\mathcal{O}(n\log{N} + m)$ complexity, instead of $\mathcal{O}(N(n + m)^3)$, where $n$, $m$, and $N$ are the dimension of the system state, control vector, and the length of the prediction horizon. We demonstrate the advantages of this implementation over two state-of-the-art solvers (acados and crocoddyl), achieving up to a 60\% improvement in runtime for Whole Body Dynamics (WB)-MPC and a 700\% improvement for Single Rigid Body Dynamics (SRBD)-MPC when varying the prediction horizon length. The presented formulation scales efficiently with the problem state dimensions as well, enabling the definition of a centralized controller for up to 16 legged robots that can be computed in less than 25 ms. Furthermore, thanks to the JAX implementation, the solver supports large-scale parallelization across multiple environments, allowing the possibility of performing learning with the MPC in the loop directly in GPU.
On-Line Learning for Planning and Control of Underactuated Robots with Uncertain Dynamics
Jan 30, 2025

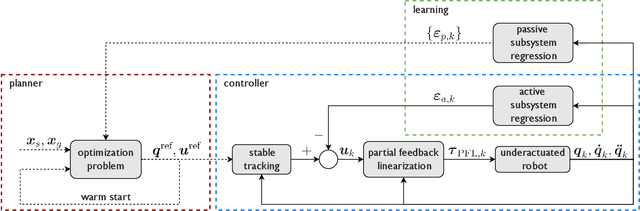

We present an iterative approach for planning and controlling motions of underactuated robots with uncertain dynamics. At its core, there is a learning process which estimates the perturbations induced by the model uncertainty on the active and passive degrees of freedom. The generic iteration of the algorithm makes use of the learned data in both the planning phase, which is based on optimization, and the control phase, where partial feedback linearization of the active dofs is performed on the model updated on-line. The performance of the proposed approach is shown by comparative simulations and experiments on a Pendubot executing various types of swing-up maneuvers. Very few iterations are typically needed to generate dynamically feasible trajectories and the tracking control that guarantees their accurate execution, even in the presence of large model uncertainties.
Online Non-linear Centroidal MPC with Stability Guarantees for Robust Locomotion of Legged Robots
Sep 02, 2024


Nonlinear model predictive locomotion controllers based on the reduced centroidal dynamics are nowadays ubiquitous in legged robots. These schemes, even if they assume an inherent simplification of the robot's dynamics, were shown to endow robots with a step-adjustment capability in reaction to small pushes, and, moreover, in the case of uncertain parameters - as unknown payloads - they were shown to be able to provide some practical, albeit limited, robustness. In this work, we provide rigorous certificates of their closed loop stability via a reformulation of the centroidal MPC controller. This is achieved thanks to a systematic procedure inspired by the machinery of adaptive control, together with ideas coming from Control Lyapunov functions. Our reformulation, in addition, provides robustness for a class of unmeasured constant disturbances. To demonstrate the generality of our approach, we validated our formulation on a new generation of humanoid robots - the 56.7 kg ergoCub, as well as on a commercially available 21 kg quadruped robot, Aliengo.
Non-Gaited Legged Locomotion with Monte-Carlo Tree Search and Supervised Learning
Aug 14, 2024



Legged robots are able to navigate complex terrains by continuously interacting with the environment through careful selection of contact sequences and timings. However, the combinatorial nature behind contact planning hinders the applicability of such optimization problems on hardware. In this work, we present a novel approach that optimizes gait sequences and respective timings for legged robots in the context of optimization-based controllers through the use of sampling-based methods and supervised learning techniques. We propose to bootstrap the search by learning an optimal value function in order to speed-up the gait planning procedure making it applicable in real-time. To validate our proposed method, we showcase its performance both in simulation and on hardware using a 22 kg electric quadruped robot. The method is assessed on different terrains, under external perturbations, and in comparison to a standard control approach where the gait sequence is fixed a priori.
PACC: A Passive-Arm Approach for High-Payload Collaborative Carrying with Quadruped Robots Using Model Predictive Control
Mar 28, 2024



In this paper, we introduce the concept of using passive arm structures with intrinsic impedance for robot-robot and human-robot collaborative carrying with quadruped robots. The concept is meant for a leader-follower task and takes a minimalist approach that focuses on exploiting the robots' payload capabilities and reducing energy consumption, without compromising the robot locomotion capabilities. We introduce a preliminary arm mechanical design and describe how to use its joint displacements to guide the robot's motion. To control the robot's locomotion, we propose a decentralized Model Predictive Controller that incorporates an approximation of the arm dynamics and the estimation of the external forces from the collaborative carrying. We validate the overall system experimentally by performing both robot-robot and human-robot collaborative carrying on a stair-like obstacle and on rough terrain.