 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Shared Embodied Intelligence in Humanoid Robots through Optimization Development and Testing of the Human Aware ergoCub Robot
May 26, 2026Collaboration is central to human behavior, enabling tasks beyond individual capability. This ability arises from coordinating actions through internal representations of others, a concept known as shared intelligence. Additionally, humans are characterized by physical bodies and cognitive abilities that are optimized in response to their environment, a phenomenon referred to as embodied cognition. Designing humanoid robots that collaborate safely and effectively with people requires unifying these principles. Here we propose an architecture that integrates shared intelligence and embodied cognition to enable robots to physically collaborate with humans, where robot hardware and control are optimized for human metrics, using representations of the human body and motion intelligence. The ultimate goal is to achieve a form of shared embodied intelligence. Specifically, our architecture optimizes robot hardware and physical intelligence parameters with respect to human ergonomic metrics. This is accomplished by modeling human-robot interaction as a function of hardware configurations and embedding human models into the robot's physical intelligence. As a concrete implementation, we present the humanoid robot ergoCub, whose morphology and control have been optimized for collaborative tasks with humans. Our approach provides a framework for designing humanoid robots that prioritize human ergonomics at both the hardware and physical intelligence levels, with applications in industrial and assistive robotics.
Online Non-linear Centroidal MPC with Stability Guarantees for Robust Locomotion of Legged Robots
Sep 02, 2024


Nonlinear model predictive locomotion controllers based on the reduced centroidal dynamics are nowadays ubiquitous in legged robots. These schemes, even if they assume an inherent simplification of the robot's dynamics, were shown to endow robots with a step-adjustment capability in reaction to small pushes, and, moreover, in the case of uncertain parameters - as unknown payloads - they were shown to be able to provide some practical, albeit limited, robustness. In this work, we provide rigorous certificates of their closed loop stability via a reformulation of the centroidal MPC controller. This is achieved thanks to a systematic procedure inspired by the machinery of adaptive control, together with ideas coming from Control Lyapunov functions. Our reformulation, in addition, provides robustness for a class of unmeasured constant disturbances. To demonstrate the generality of our approach, we validated our formulation on a new generation of humanoid robots - the 56.7 kg ergoCub, as well as on a commercially available 21 kg quadruped robot, Aliengo.
Codesign of Humanoid Robots for Ergonomy Collaboration with Multiple Humans via Genetic Algorithms and Nonlinear Optimization
Dec 12, 2023



Ergonomics is a key factor to consider when designing control architectures for effective physical collaborations between humans and humanoid robots. In contrast, ergonomic indexes are often overlooked in the robot design phase, which leads to suboptimal performance in physical human-robot interaction tasks. This paper proposes a novel methodology for optimizing the design of humanoid robots with respect to ergonomic indicators associated with the interaction of multiple agents. Our approach leverages a dynamic and kinematic parameterization of the robot link and motor specifications to seek for optimal robot designs using a bilevel optimization approach. Specifically, a genetic algorithm first generates robot designs by selecting the link and motor characteristics. Then, we use nonlinear optimization to evaluate interaction ergonomy indexes during collaborative payload lifting with different humans and weights. To assess the effectiveness of our approach, we compare the optimal design obtained using bilevel optimization against the design obtained using nonlinear optimization. Our results show that the proposed approach significantly improves ergonomics in terms of energy expenditure calculated in two reference scenarios involving static and dynamic robot motions. We plan to apply our methodology to drive the design of the ergoCub2 robot, a humanoid intended for optimal physical collaboration with humans in diverse environments
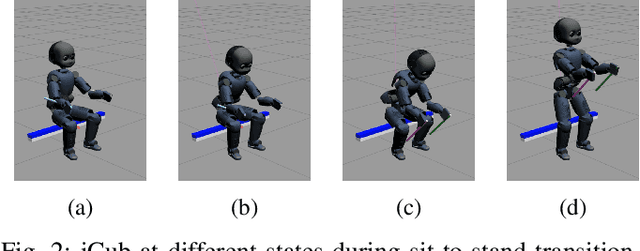
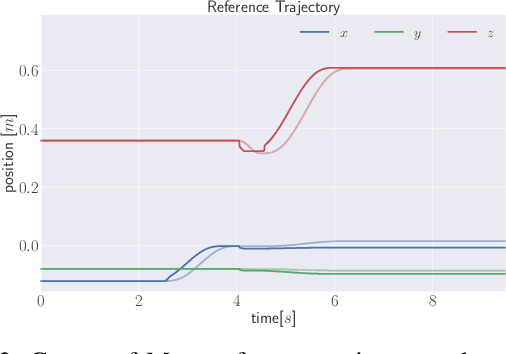
Online Non-linear Centroidal MPC for Humanoid Robots Payload Carrying with Contact-Stable Force Parametrization
May 18, 2023



In this paper we consider the problem of allowing a humanoid robot that is subject to a persistent disturbance, in the form of a payload-carrying task, to follow given planned footsteps. To solve this problem, we combine an online nonlinear centroidal Model Predictive Controller - MPC with a contact stable force parametrization. The cost function of the MPC is augmented with terms handling the disturbance and regularizing the parameter. The performance of the resulting controller is validated both in simulations and on the humanoid robot iCub. Finally, the effect of using the parametrization on the computational time of the controller is briefly studied.
A Control Approach for Human-Robot Ergonomic Payload Lifting
May 15, 2023



Collaborative robots can relief human operators from excessive efforts during payload lifting activities. Modelling the human partner allows the design of safe and efficient collaborative strategies. In this paper, we present a control approach for human-robot collaboration based on human monitoring through whole-body wearable sensors, and interaction modelling through coupled rigid-body dynamics. Moreover, a trajectory advancement strategy is proposed, allowing for online adaptation of the robot trajectory depending on the human motion. The resulting framework allows us to perform payload lifting tasks, taking into account the ergonomic requirements of the agents. Validation has been performed in an experimental scenario using the iCub3 humanoid robot and a human subject sensorized with the iFeel wearable system.
Optimization of Humanoid Robot Designs for Human-Robot Ergonomic Payload Lifting
Nov 24, 2022



When a human and a humanoid robot collaborate physically, ergonomics is a key factor to consider. Assuming a given humanoid robot, several control architectures exist nowadays to address ergonomic physical human-robot collaboration. This paper takes one step further by considering robot hardware parameters as optimization variables in the problem of collaborative payload lifting. The variables that parametrize robot's kinematics and dynamics ensure their physical consistency, and the human model is considered in the optimization problem. By leveraging the proposed modelling framework, the ergonomy of the interaction is maximized, here given by the agents' energy expenditure. Robot kinematic, dynamics, hardware constraints and human geometries are considered when solving the associated optimization problem. The proposed methodology is used to identify optimum hardware parameters for the design of the ergoCub robot, a humanoid possessing a degree of embodied intelligence for ergonomic interaction with humans. For the optimization problem, the starting point is the iCub humanoid robot. The obtained robot design reaches loads at heights in the range of 0.8-1.5 m with respect to the iCub robot whose range is limited to 0.8-1.2 m. The robot energy expenditure is decreased by about 33%, meanwhile, the human ergonomy is preserved, leading overall to an improved interaction.
Whole-Body Human Kinematics Estimation using Dynamical Inverse Kinematics and Contact-Aided Lie Group Kalman Filter
May 16, 2022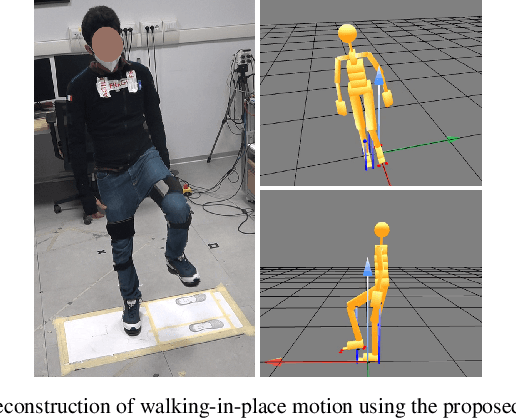
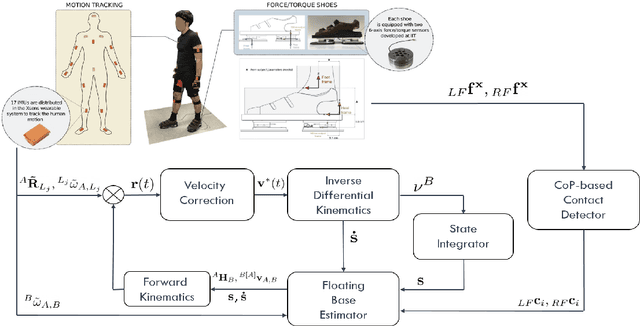
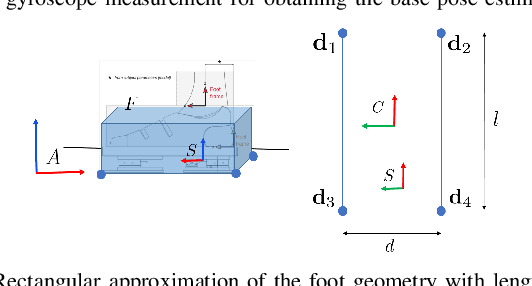
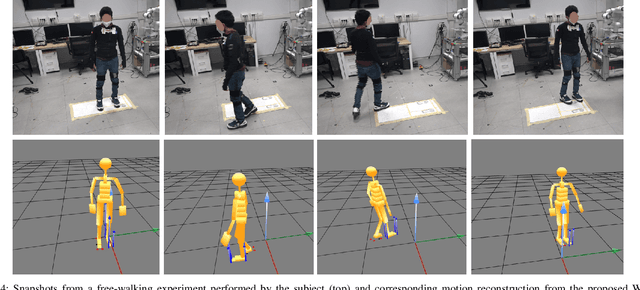
Full-body motion estimation of a human through wearable sensing technologies is challenging in the absence of position sensors. This paper contributes to the development of a model-based whole-body kinematics estimation algorithm using wearable distributed inertial and force-torque sensing. This is done by extending the existing dynamical optimization-based Inverse Kinematics (IK) approach for joint state estimation, in cascade, to include a center of pressure-based contact detector and a contact-aided Kalman filter on Lie groups for floating base pose estimation. The proposed method is tested in an experimental scenario where a human equipped with a sensorized suit and shoes performs walking motions. The proposed method is demonstrated to obtain a reliable reconstruction of the whole-body human motion.
iCub3 Avatar System
Mar 14, 2022
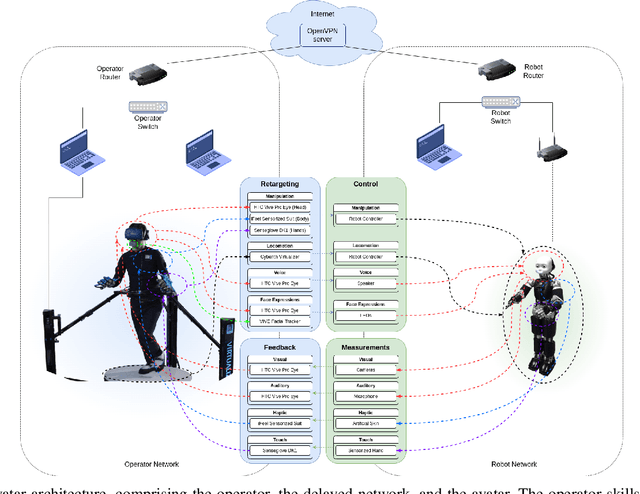
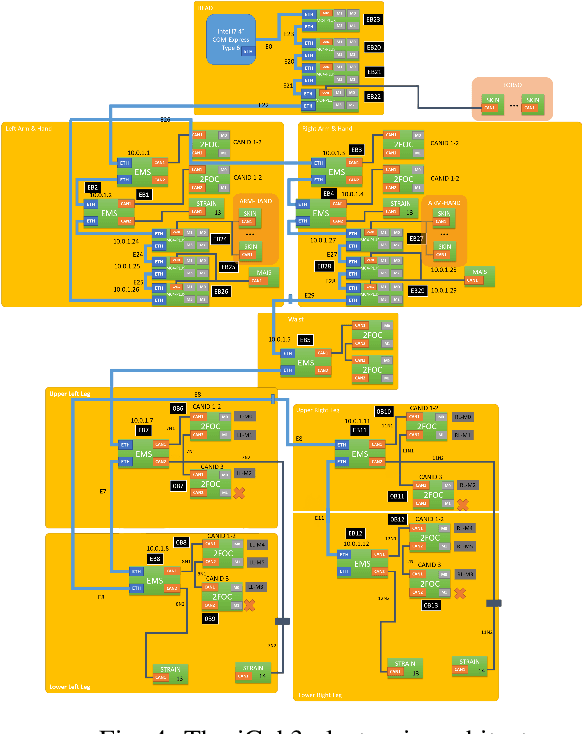
We present an avatar system that enables a human operator to visit a remote location via iCub3, a new humanoid robot developed at the Italian Institute of Technology (IIT) paving the way for the next generation of the iCub platforms. On the one hand, we present the humanoid iCub3 that plays the role of the robotic avatar. Particular attention is paid to the differences between iCub3 and the classical iCub humanoid robot. On the other hand, we present the set of technologies of the avatar system at the operator side. They are mainly composed of iFeel, namely, IIT lightweight non-invasive wearable devices for motion tracking and haptic feedback, and of non-IIT technologies designed for virtual reality ecosystems. Finally, we show the effectiveness of the avatar system by describing a demonstration involving a realtime teleoperation of the iCub3. The robot is located in Venice, Biennale di Venezia, while the human operator is at more than 290km distance and located in Genoa, IIT. Using a standard fiber optic internet connection, the avatar system transports the operator locomotion, manipulation, voice, and face expressions to the iCub3 with visual, auditory, haptic and touch feedback.
Shared Control of Robot-Robot Collaborative Lifting with Agent Postural and Force Ergonomic Optimization
Apr 28, 2021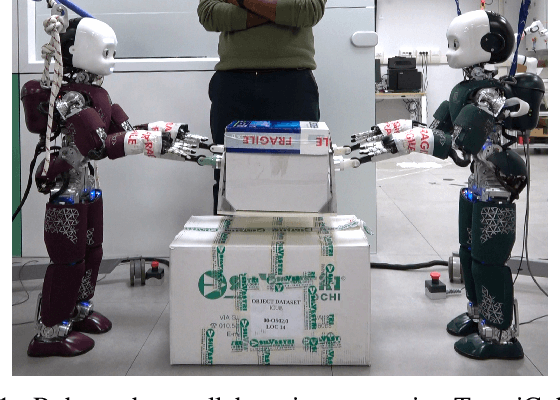
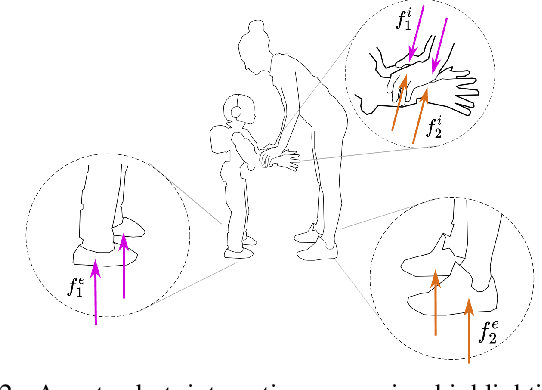
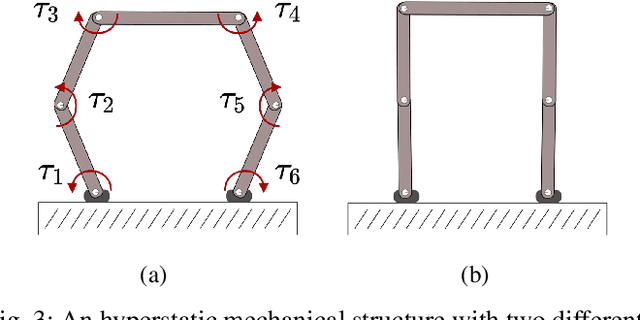
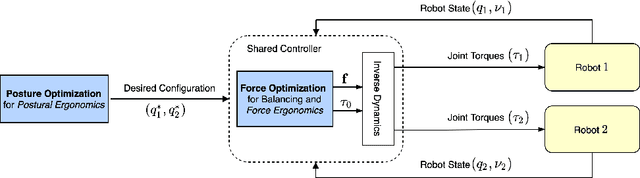
Humans show specialized strategies for efficient collaboration. Transferring similar strategies to humanoid robots can improve their capability to interact with other agents, leading the way to complex collaborative scenarios with multiple agents acting on a shared environment. In this paper we present a control framework for robot-robot collaborative lifting. The proposed shared controller takes into account the joint action of both the robots thanks to a centralized controller that communicates with them, and solves the whole-system optimization. Efficient collaboration is ensured by taking into account the ergonomic requirements of the robots through the optimization of posture and contact forces. The framework is validated in an experimental scenario with two iCub humanoid robots performing different payload lifting sequences.
Recent Advances in Human-Robot Collaboration Towards Joint Action
Jan 02, 2020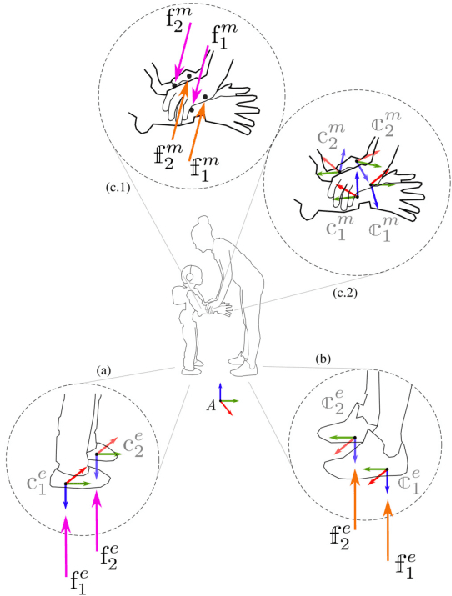

Robots existed as separate entities till now, but the horizons of a symbiotic human-robot partnership are impending. Despite all the recent technical advances in terms of hardware, robots are still not endowed with desirable relational skills that ensure a social component in their existence. This article draws from our experience as roboticists in Human-Robot Collaboration (HRC) with humanoid robots and presents some of the recent advances made towards realizing intuitive robot behaviors and partner-aware control involving physical interactions.