 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBinWalker: Development and Field Evaluation of a Quadruped Manipulator Platform for Sustainable Litter Collection
Mar 11, 2026Litter pollution represents a growing environmental problem affecting natural and urban ecosystems worldwide. Waste discarded in public spaces often accumulates in areas that are difficult to access, such as uneven terrains, coastal environments, parks, and roadside vegetation. Over time, these materials degrade and release harmful substances, including toxic chemicals and microplastics, which can contaminate soil and water and pose serious threats to wildlife and human health. Despite increasing awareness of the problem, litter collection is still largely performed manually by human operators, making large-scale cleanup operations labor-intensive, time-consuming, and costly. Robotic solutions have the potential to support and partially automate environmental cleanup tasks. In this work, we present a quadruped robotic system designed for autonomous litter collection in challenging outdoor scenarios. The robot combines the mobility advantages of legged locomotion with a manipulation system consisting of a robotic arm and an onboard litter container. This configuration enables the robot to detect, grasp, and store litter items while navigating through uneven terrains. The proposed system aims to demonstrate the feasibility of integrating perception, locomotion, and manipulation on a legged robotic platform for environmental cleanup tasks. Experimental evaluations conducted in outdoor scenarios highlight the effectiveness of the approach and its potential for assisting large-scale litter removal operations in environments that are difficult to reach with traditional robotic platforms. The code associated with this work can be found at: https://github.com/iit-DLSLab/trash-collection-isaaclab.
SANDRO: a Robust Solver with a Splitting Strategy for Point Cloud Registration
Mar 10, 2025



Point cloud registration is a critical problem in computer vision and robotics, especially in the field of navigation. Current methods often fail when faced with high outlier rates or take a long time to converge to a suitable solution. In this work, we introduce a novel algorithm for point cloud registration called SANDRO (Splitting strategy for point cloud Alignment using Non-convex anD Robust Optimization), which combines an Iteratively Reweighted Least Squares (IRLS) framework with a robust loss function with graduated non-convexity. This approach is further enhanced by a splitting strategy designed to handle high outlier rates and skewed distributions of outliers. SANDRO is capable of addressing important limitations of existing methods, as in challenging scenarios where the presence of high outlier rates and point cloud symmetries significantly hinder convergence. SANDRO achieves superior performance in terms of success rate when compared to the state-of-the-art methods, demonstrating a 20% improvement from the current state of the art when tested on the Redwood real dataset and 60% improvement when tested on synthetic data.
Creating a Segmented Pointcloud of Grapevines by Combining Multiple Viewpoints Through Visual Odometry
Aug 29, 2024


Grapevine winter pruning is a labor-intensive and repetitive process that significantly influences the quality and quantity of the grape harvest and produced wine of the following season. It requires a careful and expert detection of the point to be cut. Because of its complexity, repetitive nature and time constraint, the task requires skilled labor that needs to be trained. This extended abstract presents the computer vision pipeline employed in project Vinum, using detectron2 as a segmentation network and keypoint visual odometry to merge different observation into a single pointcloud used to make informed pruning decisions.
Accelerating Model Predictive Control for Legged Robots through Distributed Optimization
Mar 27, 2024



This paper presents a novel approach to enhance Model Predictive Control (MPC) for legged robots through Distributed Optimization. Our method focuses on decomposing the robot dynamics into smaller, parallelizable subsystems, and utilizing the Alternating Direction Method of Multipliers (ADMM) to ensure consensus among them. Each subsystem is managed by its own Optimal Control Problem, with ADMM facilitating consistency between their optimizations. This approach not only decreases the computational time but also allows for effective scaling with more complex robot configurations, facilitating the integration of additional subsystems such as articulated arms on a quadruped robot. We demonstrate, through numerical evaluations, the convergence of our approach on two systems with increasing complexity. In addition, we showcase that our approach converges towards the same solution when compared to a state-of-the-art centralized whole-body MPC implementation. Moreover, we quantitatively compare the computational efficiency of our method to the centralized approach, revealing up to a 75\% reduction in computational time. Overall, our approach offers a promising avenue for accelerating MPC solutions for legged robots, paving the way for more effective utilization of the computational performance of modern hardware.
ContactNet: Online Multi-Contact Planning for Acyclic Legged Robot Locomotion
Sep 30, 2022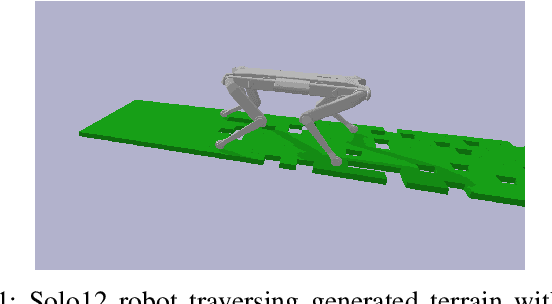
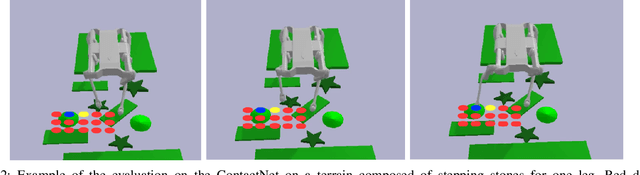
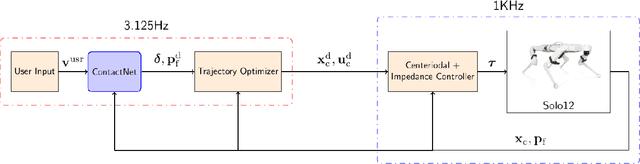
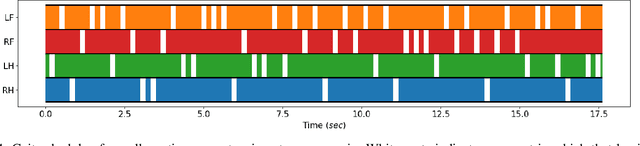
Online trajectory optimization techniques generally depend on heuristic-based contact planners in order to have low computation times and achieve high replanning frequencies. In this work, we propose ContactNet, a fast acyclic contact planner based on a multi-output regression neural network. ContactNet ranks discretized stepping regions, allowing to quickly choose the best feasible solution, even in complex environments. The low computation time, in the order of 1 ms, makes possible the execution of the contact planner concurrently with a trajectory optimizer in a Model Predictive Control (MPC) fashion. We demonstrate the effectiveness of the approach in simulation in different complex scenarios with the quadruped robot Solo12.
Governor: a Reference Generator for Nonlinear Model Predictive Control in Legged Robots
Jul 20, 2022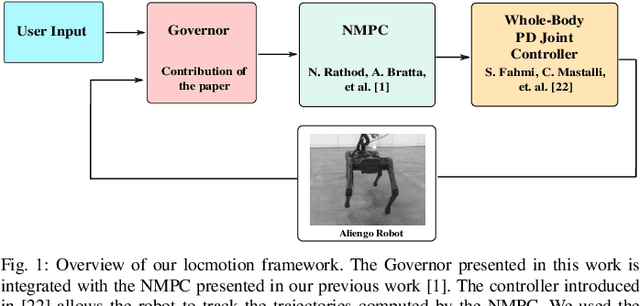
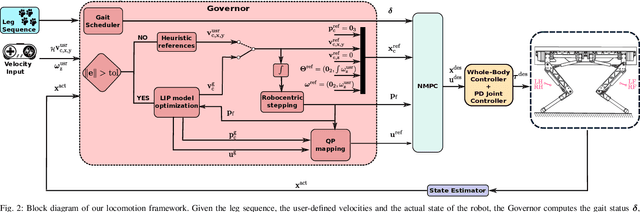
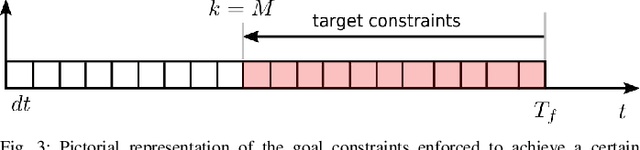
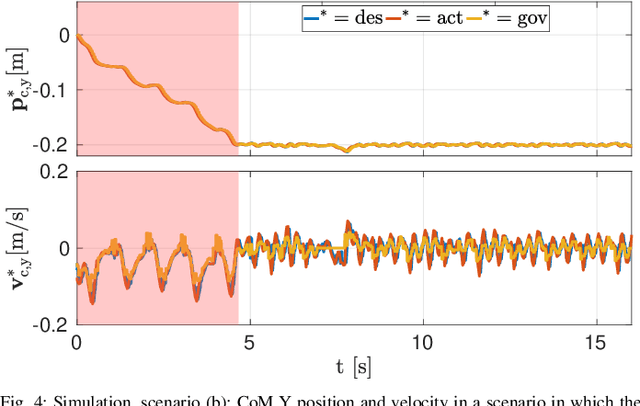
Model Predictive Control (MPC) approaches are widely used in robotics, since they allow to compute updated trajectories while the robot is moving. They generally require heuristic references for the tracking terms and proper tuning of parameters of the cost function in order to obtain good performance. When for example, a legged robot has to react to disturbances from the environment (e.g., recover after a push) or track a certain goal with statically unstable gaits, the effectiveness of the algorithm can degrade. In this work we propose a novel optimization-based Reference Generator, named Governor, which exploits a Linear Inverted Pendulum model to compute reference trajectories for the Center of Mass, while taking into account the possible under-actuation of a gait (e.g. in a trot). The obtained trajectories are used as references for the cost function of the Nonlinear MPC presented in our previous work [1]. We also present a formulation that can guarantee a certain response time to reach a goal, without the need to tune the weights of the cost terms. In addition, foothold locations are corrected to drive the robot towards the goal. We demonstrate the effectiveness of our approach both in simulations and experiments in different scenarios with the Aliengo robot.
Foothold Evaluation Criterion for Dynamic Transition Feasibility for Quadruped Robots
Mar 08, 2022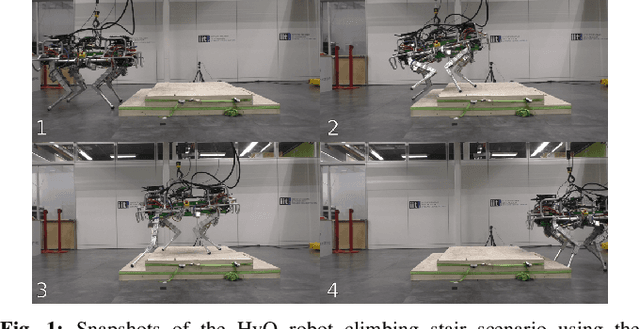

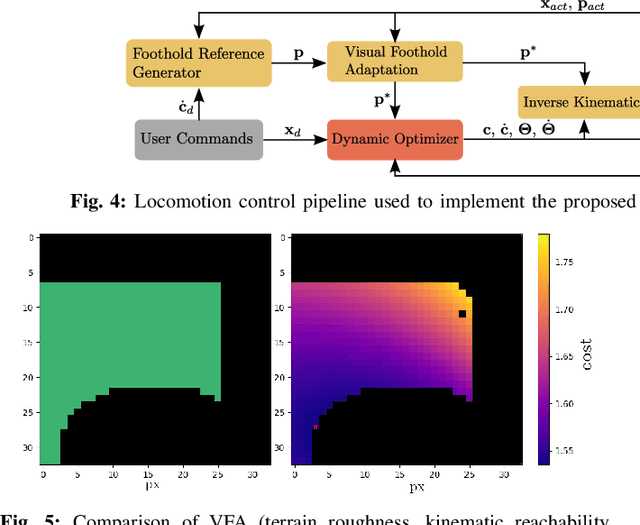
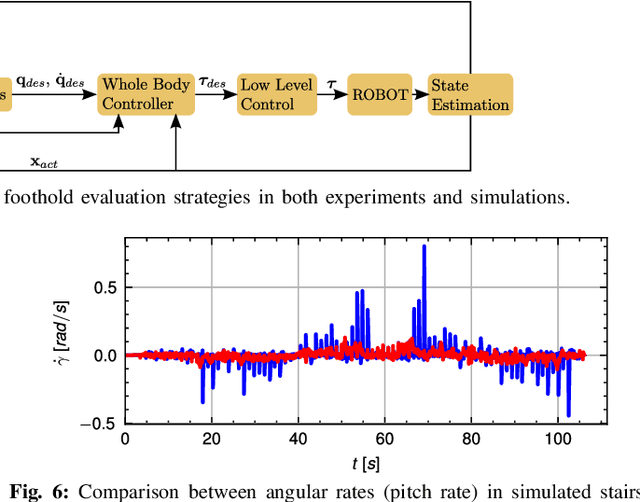
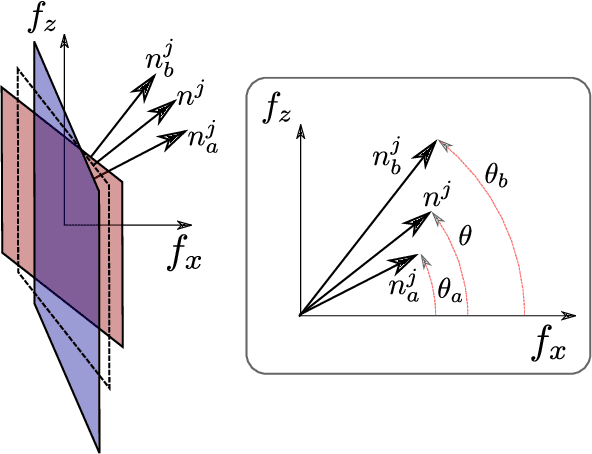
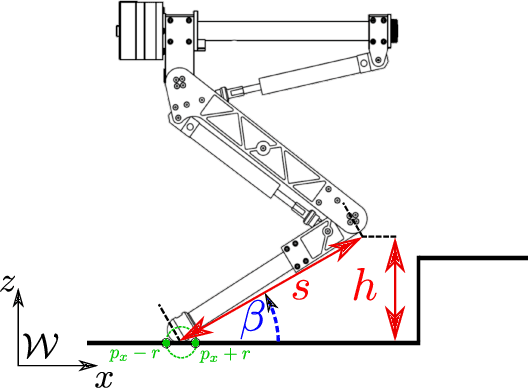
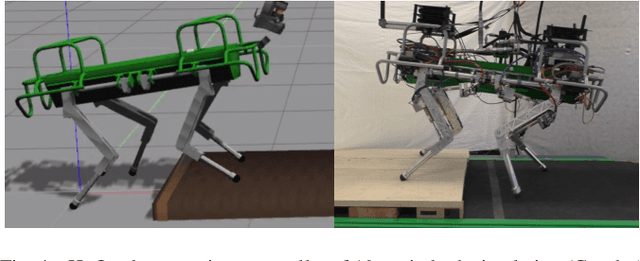
To traverse complex scenarios reliably a legged robot needs to move its base aided by the ground reaction forces, which can only be generated by the legs that are momentarily in contact with the ground. A proper selection of footholds is crucial for maintaining balance. In this paper, we propose a foothold evaluation criterion that considers the transition feasibility for both linear and angular dynamics to overcome complex scenarios. We devise convex and nonlinear formulations as a direct extension of the Continuous Convex Resolution of Centroidal Dynamic Trajectories (C-CROC) in a receding-horizon fashion to grant dynamic feasibility for future behaviours. The criterion is integrated with a Vision-based Foothold Adaptation (VFA) strategy that takes into account the robot kinematics, leg collisions and terrain morphology. We verify the validity of the selected footholds and the generated trajectories in simulation and experiments with the 90kg quadruped robot HyQ.
Mobility-enhanced MPC for Legged Locomotion on Rough Terrain
May 12, 2021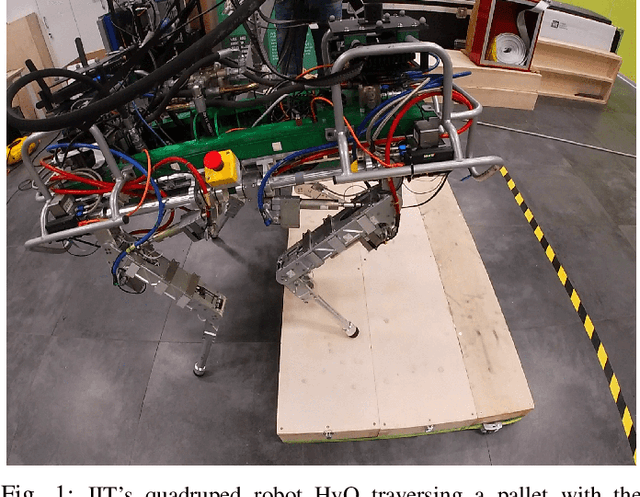
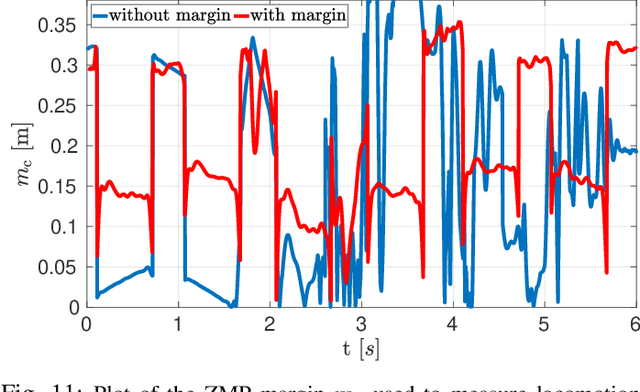
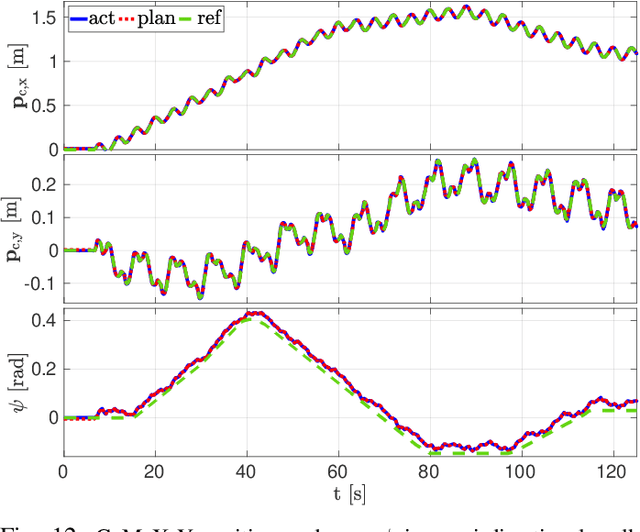
Re-planning in legged locomotion is crucial to track a given set-point while adapting to the terrain and rejecting external disturbances. In this work, we propose a real-time Nonlinear Model Predictive Control (NMPC) tailored to a legged robot for achieving dynamic locomotion on a wide variety of terrains. We introduce a mobility-based criterion to define an NMPC cost that enhances the locomotion of quadruped robots while maximizing leg mobility and staying far from kinematic limits. Our NMPC is based on the real-time iteration scheme that allows us to re-plan online at $25 \, \mathrm{Hz}$ with a time horizon of $2$ seconds. We use the single rigid body dynamic model defined in the center of mass frame that allows to increase the computational efficiency. In simulations, the NMPC is tested to traverse a set of pallets of different sizes, to walk into a V-shaped chimney, and to locomote over rough terrain. We demonstrate the effectiveness of our NMPC with the mobility feature that allowed IIT's $87.4 \,\mathrm{kg}$ quadruped robot HyQ to achieve an omni-directional walk on flat terrain, to traverse a static pallet, and to adapt to a repositioned pallet during a walk in real experiments.
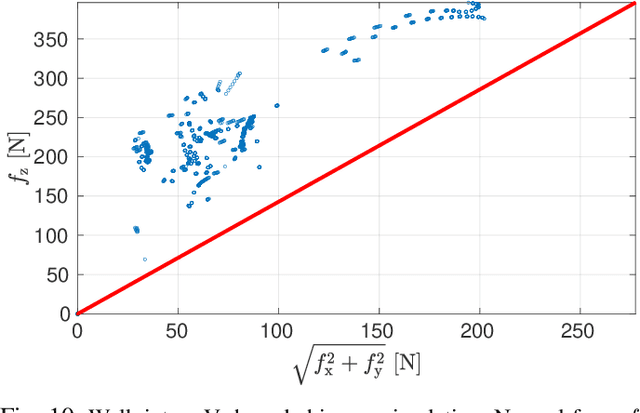
On the Hardware Feasibility of Nonlinear Trajectory Optimization for Legged Locomotion based on a Simplified Dynamics
Oct 15, 2019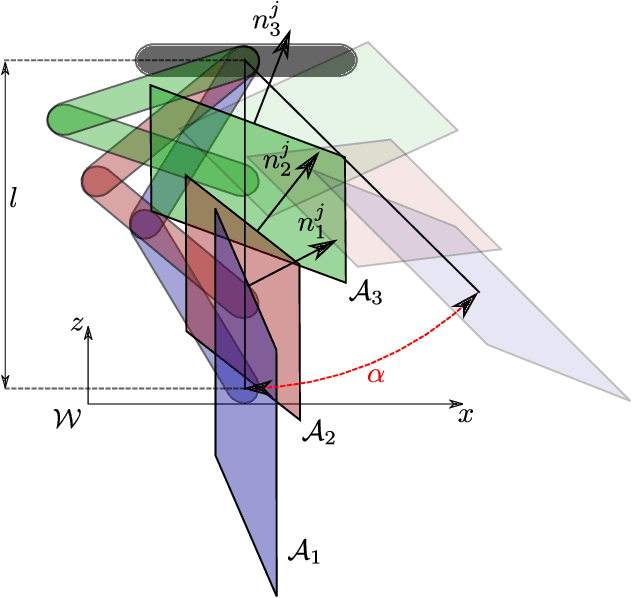
We propose two feasibility constraints to be included in a Single Rigid Body Dynamics-based trajectory optimizer in order to obtain robust motions for quadruped robots in challenging terrain. The former finds an approximate relationship between joint-torque limits and admissible contact forces without requiring the knowledge of the joints' configuration. The latter proposes a model of the leg to guarantee the avoidance of the collision with the environment. Such constraints have been included in a nonlinear non-convex optimization problem. We validate the feasibility of the trajectories both in simulation and on the HyQ robot, including experiments with non flat terrain.