 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGuided Reinforcement Learning for Omnidirectional 3D Jumping in Quadruped Robots
Jul 22, 2025Jumping poses a significant challenge for quadruped robots, despite being crucial for many operational scenarios. While optimisation methods exist for controlling such motions, they are often time-consuming and demand extensive knowledge of robot and terrain parameters, making them less robust in real-world scenarios. Reinforcement learning (RL) is emerging as a viable alternative, yet conventional end-to-end approaches lack efficiency in terms of sample complexity, requiring extensive training in simulations, and predictability of the final motion, which makes it difficult to certify the safety of the final motion. To overcome these limitations, this paper introduces a novel guided reinforcement learning approach that leverages physical intuition for efficient and explainable jumping, by combining B\'ezier curves with a Uniformly Accelerated Rectilinear Motion (UARM) model. Extensive simulation and experimental results clearly demonstrate the advantages of our approach over existing alternatives.
Pseudo-kinematic trajectory control of tracked vehicles
Sep 27, 2024



Tracked vehicles are used in complex scenarios, where motion planning and navigation can be very complex. They have complex dynamics, with many parameters that are difficult to identify and that change significantly based on the operating conditions. We propose a simple pseudo-kinematic model, where the intricate dynamic effects underlying the vehicle's motion are captured in a small set of velocity-dependent parameters. This choice enables the development of a Lyapunov-based trajectory controller with guaranteed performance and small computation time. We demonstrate the correctness of our approach with both simulation and experimental data.
ALPINE: a climbing robot for operations in mountain environments
Mar 22, 2024



Mountain slopes are perfect examples of harsh environments in which humans are required to perform difficult and dangerous operations such as removing unstable boulders, dangerous vegetation or deploying safety nets. A good replacement for human intervention can be offered by climbing robots. The different solutions existing in the literature are not up to the task for the difficulty of the requirements (navigation, heavy payloads, flexibility in the execution of the tasks). In this paper, we propose a robotic platform that can fill this gap. Our solution is based on a robot that hangs on ropes, and uses a retractable leg to jump away from the mountain walls. Our package of mechanical solutions, along with the algorithms developed for motion planning and control, delivers swift navigation on irregular and steep slopes, the possibility to overcome or travel around significant natural barriers, and the ability to carry heavy payloads and execute complex tasks. In the paper, we give a full account of our main design and algorithmic choices and show the feasibility of the solution through a large number of physically simulated scenarios.
Efficient Reinforcement Learning for Jumping Monopods
Sep 22, 2023



In this work, we consider the complex control problem of making a monopod reach a target with a jump. The monopod can jump in any direction and the terrain underneath its foot can be uneven. This is a template of a much larger class of problems, which are extremely challenging and computationally expensive to solve using standard optimisation-based techniques. Reinforcement Learning (RL) could be an interesting alternative, but the application of an end-to-end approach in which the controller must learn everything from scratch, is impractical. The solution advocated in this paper is to guide the learning process within an RL framework by injecting physical knowledge. This expedient brings to widespread benefits, such as a drastic reduction of the learning time, and the ability to learn and compensate for possible errors in the low-level controller executing the motion. We demonstrate the advantage of our approach with respect to both optimization-based and end-to-end RL approaches.
Reactive Landing Controller for Quadruped Robots
May 12, 2023Quadruped robots are machines intended for challenging and harsh environments. Despite the progress in locomotion strategy, safely recovering from unexpected falls or planned drops is still an open problem. It is further made more difficult when high horizontal velocities are involved. In this work, we propose an optimization-based reactive Landing Controller that uses only proprioceptive measures for torque-controlled quadruped robots that free-fall on a flat horizontal ground, knowing neither the distance to the landing surface nor the flight time. Based on an estimate of the Center of Mass horizontal velocity, the method uses the Variable Height Springy Inverted Pendulum model for continuously recomputing the feet position while the robot is falling. In this way, the quadruped is ready to attain a successful landing in all directions, even in the presence of significant horizontal velocities. The method is demonstrated to dramatically enlarge the region of horizontal velocities that can be dealt with by a naive approach that keeps the feet still during the airborne stage. To the best of our knowledge, this is the first time that a quadruped robot can successfully recover from falls with horizontal velocities up to 3 m/s in simulation. Experiments prove that the used platform, Go1, can successfully attain a stable standing configuration from falls with various horizontal velocity and different angular perturbations.
Locosim: an Open-Source Cross-Platform Robotics Framework
May 03, 2023



The architecture of a robotics software framework tremendously influences the effort and time it takes for end users to test new concepts in a simulation environment and to control real hardware. Many years of activity in the field allowed us to sort out crucial requirements for a framework tailored for robotics: modularity and extensibility, source code reusability, feature richness, and user-friendliness. We implemented these requirements and collected best practices in Locosim, a cross-platform framework for simulation and real hardware. In this paper, we describe the architecture of Locosim and illustrate some use cases that show its potential.
ContactNet: Online Multi-Contact Planning for Acyclic Legged Robot Locomotion
Sep 30, 2022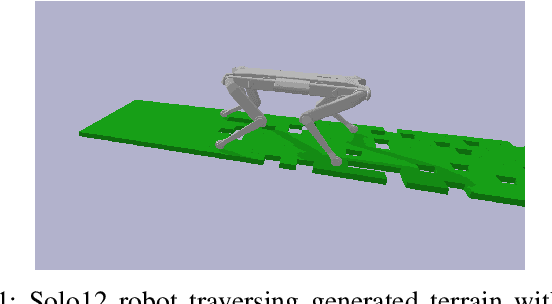
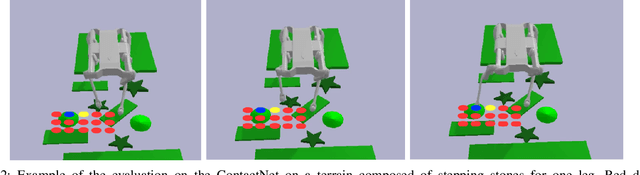
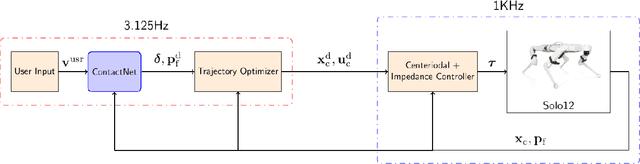
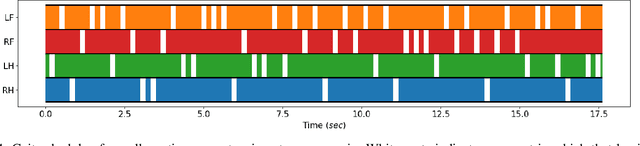
Online trajectory optimization techniques generally depend on heuristic-based contact planners in order to have low computation times and achieve high replanning frequencies. In this work, we propose ContactNet, a fast acyclic contact planner based on a multi-output regression neural network. ContactNet ranks discretized stepping regions, allowing to quickly choose the best feasible solution, even in complex environments. The low computation time, in the order of 1 ms, makes possible the execution of the contact planner concurrently with a trajectory optimizer in a Model Predictive Control (MPC) fashion. We demonstrate the effectiveness of the approach in simulation in different complex scenarios with the quadruped robot Solo12.
CLIO: a Novel Robotic Solution for Exploration and Rescue Missions in Hostile Mountain Environments
Sep 20, 2022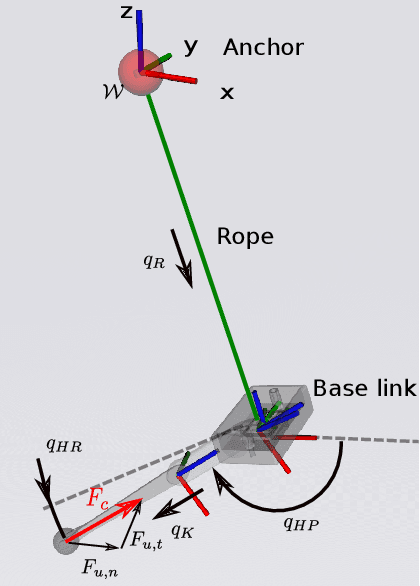
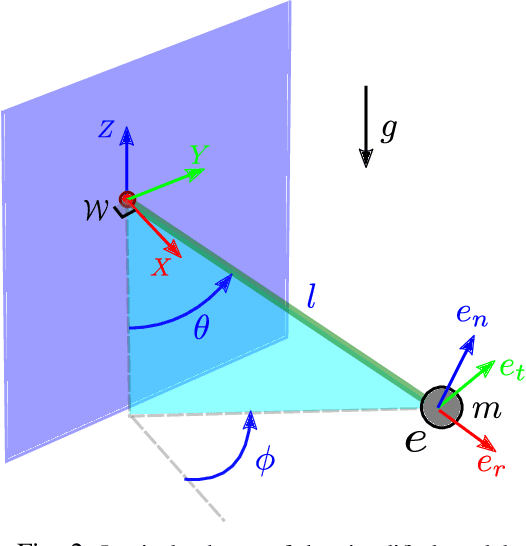
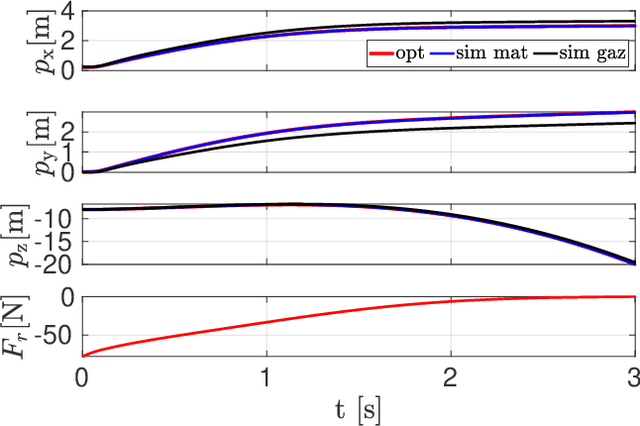
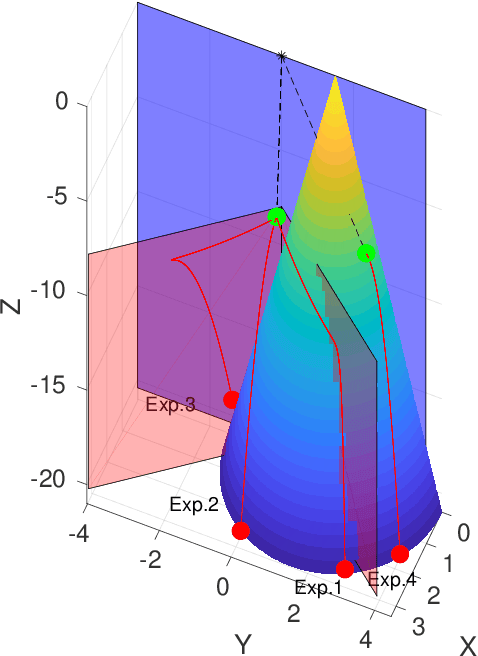
Rescue missions in mountain environments are hardly achievable by standard legged robots - because of the high slopes - or by flying robots - because of limited payload capacity. We present a novel concept for a rope-aided climbing robot, which can negotiate up-to-vertical slopes and carry heavy payloads. The robot is attached to the mountain through a rope, and is equipped with a leg to push against the mountain and initiate jumping maneuvers. Between jumps, a hoist is used to wind/unwind the rope to move vertically and affect the lateral motion. This simple (yet effective) two-fold actuation allows the system to achieve high safety and energy efficiency. Indeed, the rope prevents the robot from falling, while compensating for most of its weight, drastically reducing the effort required by the leg actuator. We also present an optimal control strategy to generate point-to-point trajectories overcoming an obstacle. We achieve fast computation time ($<$1 s) thanks to the use of a custom simplified robot model. We validated the generated optimal movements in Gazebo simulations with a complete robot model, showing the effectiveness of the proposed approach, and confirming the interest of our concept. Finally, we performed a reachability analysis showing that the region of achievable targets is strongly affected by the friction properties of the foot-wall contact.
Orientation Control System: Enhancing Aerial Maneuvers for Quadruped Robots
Aug 25, 2022
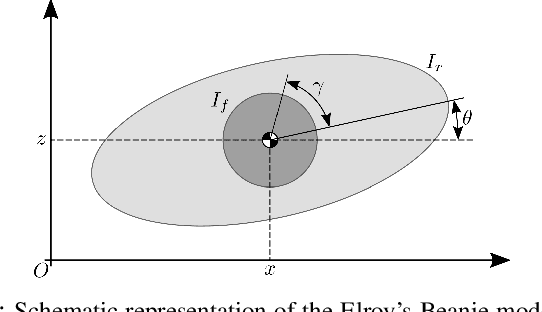
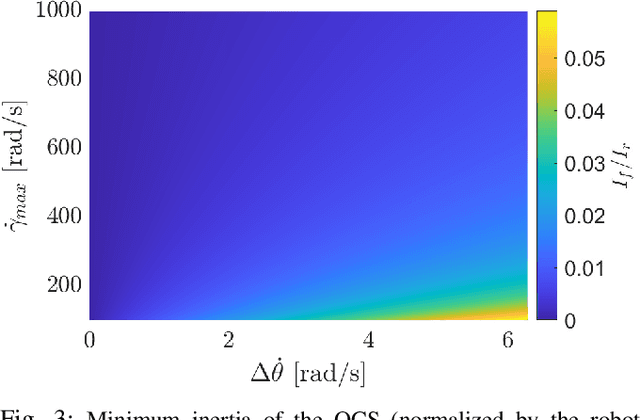
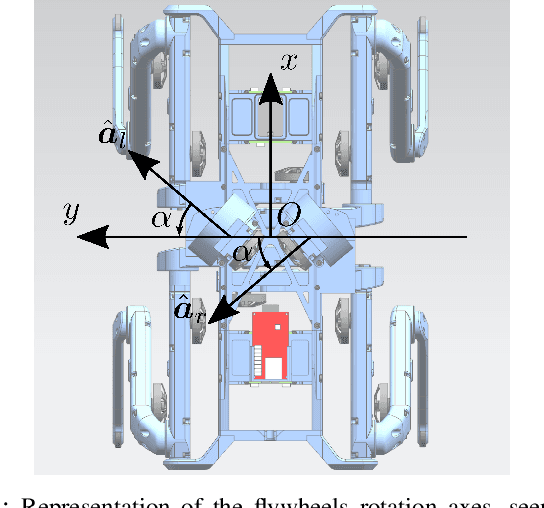
For legged robots, aerial motions are the only option to overpass obstacles that cannot be circumvent with standard locomotion gaits. In these cases, the robot must perform a leap to either jump onto the obstacle or fly over it. However, these movements represent a challenge because during the flight phase the \gls{com} cannot be controlled, and the robot orientation has limited controllability. This paper focuses on the latter issue and proposes an \gls{ocs} consisting of two rotating and actuated masses (flywheels or reaction wheels) to gain control authority on the robot orientation. Because of the conservation of angular momentum, their rotational velocity can be adjusted to steer the robot orientation even when there are no contacts with the ground. The axes of rotation of the flywheels are designed to be incident, leading to a compact orientation control system that is capable of controlling both roll and pitch angles, considering the different moment of inertia in the two directions. We tested the concept with simulations on the robot Solo12.
Governor: a Reference Generator for Nonlinear Model Predictive Control in Legged Robots
Jul 20, 2022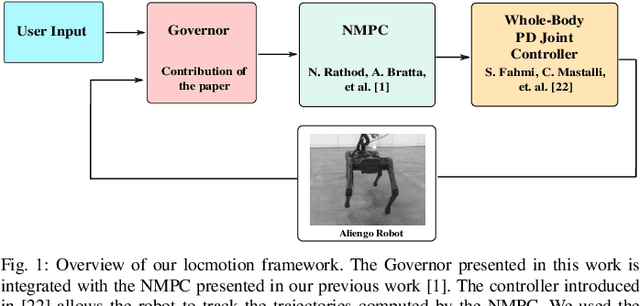
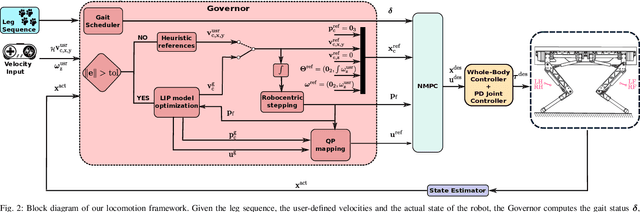
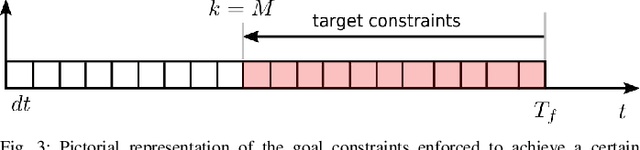
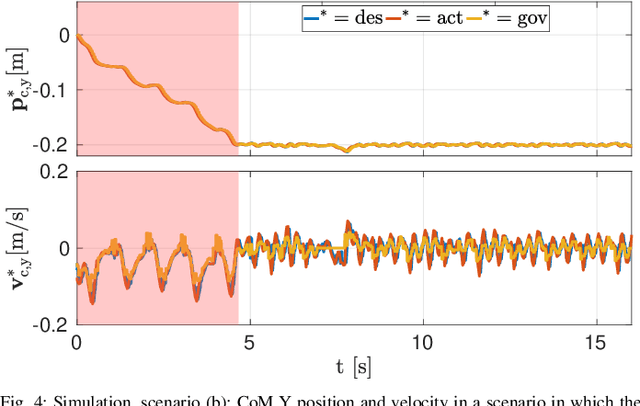
Model Predictive Control (MPC) approaches are widely used in robotics, since they allow to compute updated trajectories while the robot is moving. They generally require heuristic references for the tracking terms and proper tuning of parameters of the cost function in order to obtain good performance. When for example, a legged robot has to react to disturbances from the environment (e.g., recover after a push) or track a certain goal with statically unstable gaits, the effectiveness of the algorithm can degrade. In this work we propose a novel optimization-based Reference Generator, named Governor, which exploits a Linear Inverted Pendulum model to compute reference trajectories for the Center of Mass, while taking into account the possible under-actuation of a gait (e.g. in a trot). The obtained trajectories are used as references for the cost function of the Nonlinear MPC presented in our previous work [1]. We also present a formulation that can guarantee a certain response time to reach a goal, without the need to tune the weights of the cost terms. In addition, foothold locations are corrected to drive the robot towards the goal. We demonstrate the effectiveness of our approach both in simulations and experiments in different scenarios with the Aliengo robot.