 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLeveraging Phytolith Research using Artificial Intelligence
Mar 12, 2026Phytolith analysis is a crucial tool for reconstructing past vegetation and human activities, but traditional methods are severely limited by labour-intensive, time-consuming manual microscopy. To address this bottleneck, we present Sorometry: a comprehensive end-to-end artificial intelligence pipeline for the high-throughput digitisation, inference, and interpretation of phytoliths. Our workflow processes z-stacked optical microscope scans to automatically generate synchronised 2D orthoimages and 3D point clouds of individual microscopic particles. We developed a multimodal fusion model that combines ConvNeXt for 2D image analysis and PointNet++ for 3D point cloud analysis, supported by a graphical user interface for expert annotation and review. Tested on reference collections and archaeological samples from the Bolivian Amazon, our fusion model achieved a global classification accuracy of 77.9\% across 24 diagnostic morphotypes and 84.5% for segmentation quality. Crucially, the integration of 3D data proved essential for distinguishing complex morphotypes (such as grass silica short cell phytoliths) whose diagnostic features are often obscured by their orientation in 2D projections. Beyond individual object classification, Sorometry incorporates Bayesian finite mixture modelling to predict overall plant source contributions at the assemblage level, successfully identifying specific plants like maize and palms in complex mixed samples. This integrated platform transforms phytolith research into an "omics"-scale discipline, dramatically expanding analytical capacity, standardising expert judgements, and enabling reproducible, population-level characterisations of archaeological and paleoecological assemblages.
Autonomous Robotic Tissue Palpation and Abnormalities Characterisation via Ergodic Exploration
Feb 15, 2026We propose a novel autonomous robotic palpation framework for real-time elastic mapping during tissue exploration using a viscoelastic tissue model. The method combines force-based parameter estimation using a commercial force/torque sensor with an ergodic control strategy driven by a tailored Expected Information Density, which explicitly biases exploration toward diagnostically relevant regions by jointly considering model uncertainty, stiffness magnitude, and spatial gradients. An Extended Kalman Filter is employed to estimate viscoelastic model parameters online, while Gaussian Process Regression provides spatial modelling of the estimated elasticity, and a Heat Equation Driven Area Coverage controller enables adaptive, continuous trajectory planning. Simulations on synthetic stiffness maps demonstrate that the proposed approach achieves better reconstruction accuracy, enhanced segmentation capability, and improved robustness in detecting stiff inclusions compared to Bayesian Optimisation-based techniques. Experimental validation on a silicone phantom with embedded inclusions emulating pathological tissue regions further corroborates the potential of the method for autonomous tissue characterisation in diagnostic and screening applications.
Guided Reinforcement Learning for Omnidirectional 3D Jumping in Quadruped Robots
Jul 22, 2025Jumping poses a significant challenge for quadruped robots, despite being crucial for many operational scenarios. While optimisation methods exist for controlling such motions, they are often time-consuming and demand extensive knowledge of robot and terrain parameters, making them less robust in real-world scenarios. Reinforcement learning (RL) is emerging as a viable alternative, yet conventional end-to-end approaches lack efficiency in terms of sample complexity, requiring extensive training in simulations, and predictability of the final motion, which makes it difficult to certify the safety of the final motion. To overcome these limitations, this paper introduces a novel guided reinforcement learning approach that leverages physical intuition for efficient and explainable jumping, by combining B\'ezier curves with a Uniformly Accelerated Rectilinear Motion (UARM) model. Extensive simulation and experimental results clearly demonstrate the advantages of our approach over existing alternatives.
Symbolically-Guided Visual Plan Inference from Uncurated Video Data
May 13, 2025Visual planning, by offering a sequence of intermediate visual subgoals to a goal-conditioned low-level policy, achieves promising performance on long-horizon manipulation tasks. To obtain the subgoals, existing methods typically resort to video generation models but suffer from model hallucination and computational cost. We present Vis2Plan, an efficient, explainable and white-box visual planning framework powered by symbolic guidance. From raw, unlabeled play data, Vis2Plan harnesses vision foundation models to automatically extract a compact set of task symbols, which allows building a high-level symbolic transition graph for multi-goal, multi-stage planning. At test time, given a desired task goal, our planner conducts planning at the symbolic level and assembles a sequence of physically consistent intermediate sub-goal images grounded by the underlying symbolic representation. Our Vis2Plan outperforms strong diffusion video generation-based visual planners by delivering 53\% higher aggregate success rate in real robot settings while generating visual plans 35$\times$ faster. The results indicate that Vis2Plan is able to generate physically consistent image goals while offering fully inspectable reasoning steps.
A Temporal Planning Framework for Multi-Agent Systems via LLM-Aided Knowledge Base Management
Feb 26, 2025This paper presents a novel framework, called PLANTOR (PLanning with Natural language for Task-Oriented Robots), that integrates Large Language Models (LLMs) with Prolog-based knowledge management and planning for multi-robot tasks. The system employs a two-phase generation of a robot-oriented knowledge base, ensuring reusability and compositional reasoning, as well as a three-step planning procedure that handles temporal dependencies, resource constraints, and parallel task execution via mixed-integer linear programming. The final plan is converted into a Behaviour Tree for direct use in ROS2. We tested the framework in multi-robot assembly tasks within a block world and an arch-building scenario. Results demonstrate that LLMs can produce accurate knowledge bases with modest human feedback, while Prolog guarantees formal correctness and explainability. This approach underscores the potential of LLM integration for advanced robotics tasks requiring flexible, scalable, and human-understandable planning.
Surface Defect Identification using Bayesian Filtering on a 3D Mesh
Jan 30, 2025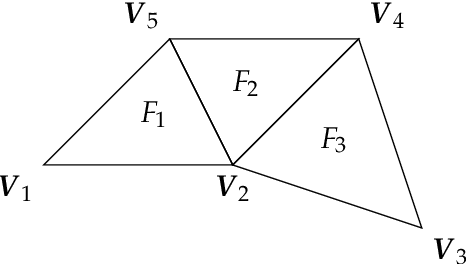
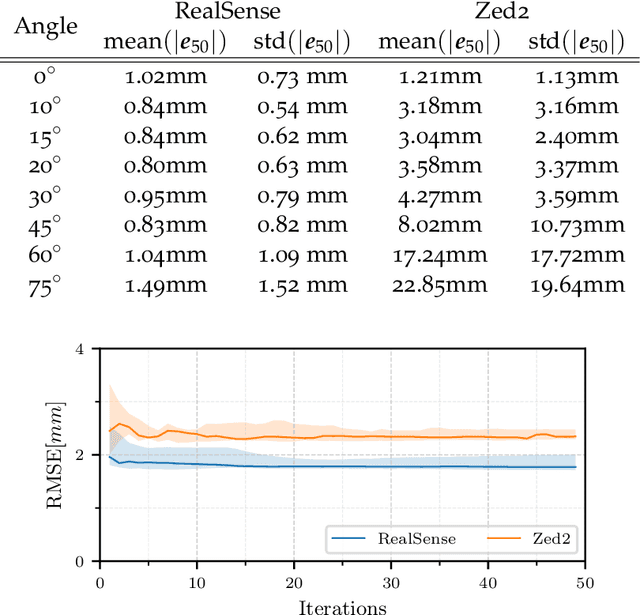
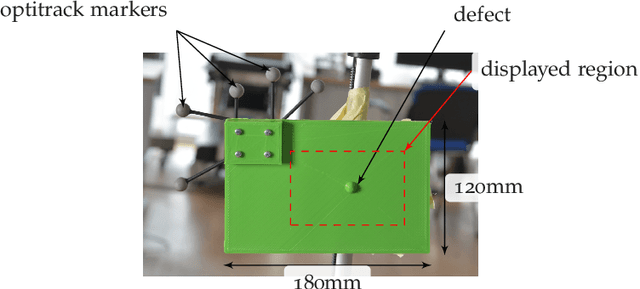
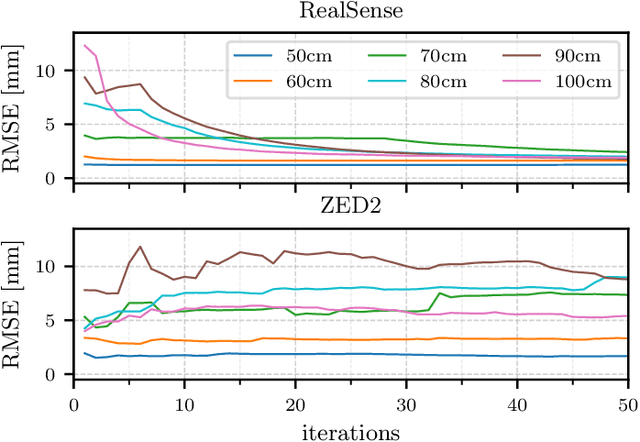
This paper presents a CAD-based approach for automated surface defect detection. We leverage the a-priori knowledge embedded in a CAD model and integrate it with point cloud data acquired from commercially available stereo and depth cameras. The proposed method first transforms the CAD model into a high-density polygonal mesh, where each vertex represents a state variable in 3D space. Subsequently, a weighted least squares algorithm is employed to iteratively estimate the state of the scanned workpiece based on the captured point cloud measurements. This framework offers the potential to incorporate information from diverse sensors into the CAD domain, facilitating a more comprehensive analysis. Preliminary results demonstrate promising performance, with the algorithm achieving convergence to a sub-millimeter standard deviation in the region of interest using only approximately 50 point cloud samples. This highlights the potential of utilising commercially available stereo cameras for high-precision quality control applications.
Learning Priors of Human Motion With Vision Transformers
Jan 30, 2025



A clear understanding of where humans move in a scenario, their usual paths and speeds, and where they stop, is very important for different applications, such as mobility studies in urban areas or robot navigation tasks within human-populated environments. We propose in this article, a neural architecture based on Vision Transformers (ViTs) to provide this information. This solution can arguably capture spatial correlations more effectively than Convolutional Neural Networks (CNNs). In the paper, we describe the methodology and proposed neural architecture and show the experiments' results with a standard dataset. We show that the proposed ViT architecture improves the metrics compared to a method based on a CNN.
Socially-Aware Opinion-Based Navigation with Oval Limit Cycles
Nov 07, 2024



When humans move in a shared space, they choose navigation strategies that preserve their mutual safety. At the same time, each human seeks to minimise the number of modifications to her/his path. In order to achieve this result, humans use unwritten rules and reach a consensus on their decisions about the motion direction by exchanging non-verbal messages. They then implement their choice in a mutually acceptable way. Socially-aware navigation denotes a research effort aimed at replicating this logic inside robots. Existing results focus either on how robots can participate in negotiations with humans, or on how they can move in a socially acceptable way. We propose a holistic approach in which the two aspects are jointly considered. Specifically, we show that by combining opinion dynamics (to reach a consensus) with vortex fields (to generate socially acceptable trajectories), the result outperforms the application of the two techniques in isolation.
MeshDMP: Motion Planning on Discrete Manifolds using Dynamic Movement Primitives
Oct 19, 2024An open problem in industrial automation is to reliably perform tasks requiring in-contact movements with complex workpieces, as current solutions lack the ability to seamlessly adapt to the workpiece geometry. In this paper, we propose a Learning from Demonstration approach that allows a robot manipulator to learn and generalise motions across complex surfaces by leveraging differential mathematical operators on discrete manifolds to embed information on the geometry of the workpiece extracted from triangular meshes, and extend the Dynamic Movement Primitives (DMPs) framework to generate motions on the mesh surfaces. We also propose an effective strategy to adapt the motion to different surfaces, by introducing an isometric transformation of the learned forcing term. The resulting approach, namely MeshDMP, is evaluated both in simulation and real experiments, showing promising results in typical industrial automation tasks like car surface polishing.
Pseudo-kinematic trajectory control of tracked vehicles
Sep 27, 2024



Tracked vehicles are used in complex scenarios, where motion planning and navigation can be very complex. They have complex dynamics, with many parameters that are difficult to identify and that change significantly based on the operating conditions. We propose a simple pseudo-kinematic model, where the intricate dynamic effects underlying the vehicle's motion are captured in a small set of velocity-dependent parameters. This choice enables the development of a Lyapunov-based trajectory controller with guaranteed performance and small computation time. We demonstrate the correctness of our approach with both simulation and experimental data.