 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Volumetric Mechanical Property Fields Invariant to Resolution
Jun 16, 2026Accurate mechanical properties (or materials) Young's modulus ($E$), Poisson's ratio ($ν$) and density ($ρ$) are essential for reliable physics simulation of digital worlds, but most 3D assets lack this information. We propose AdaVoMP, a method for predicting accurate dense spatially-varying ($E$, $ν$, $ρ$) for input 3D objects across representations, improving the resolution, accuracy, and memory efficiency over the state-of-the-art. The foundation of our technique is a sparse and adaptive voxel structure SAV that efficiently represents both the input 3D shape and the material field output. We replace the fixed-voxel model of the most accurate prior method, VoMP, with a novel sparse transformer encoder-decoder model that learns to generate a unique SAV autoregressively for every input shape to represent its materials, achieving a resolution $16^3\times$ higher than prior art. Experiments show that AdaVoMP estimates more accurate volumetric properties, even with lesser test-time compute than all prior art. This allows us to convert high-resolution complex 3D objects into simulation-ready assets, resulting in realistic deformable simulations.
FreeForm: Reduced-Order Deformable Simulation from Particle-Based Skinning Eigenmodes
May 28, 2026We present a novel formulation for mesh-free, reduced-order simulation of deformable hyperelastic objects. Existing work in reduced-order elastodynamic simulation represents the input geometry by either meshes, which can be difficult to obtain due to challenges in scanning and triangulating complex shapes, or by neural fields that require per-shape optimization. We propose to adopt a Reproducing Kernel Particle Method (RKPM) representation, which enables the construction of reduced-order skinning weights by solving a generalized eigensystem on the Hessian matrix of the elastic energy. We demonstrate that this formulation not only leads to a 40x training speedup compared with the per-shape optimization of neural fields, but also achieves lower simulation error when evaluated against the converged results of finite element method. We show our simulation results on a wide variety of objects in different representations including meshes and Gaussian splats, as well as the application of our method in the downstream task of robot simulation.
VoMP: Predicting Volumetric Mechanical Property Fields
Oct 27, 2025Physical simulation relies on spatially-varying mechanical properties, often laboriously hand-crafted. VoMP is a feed-forward method trained to predict Young's modulus ($E$), Poisson's ratio ($\nu$), and density ($\rho$) throughout the volume of 3D objects, in any representation that can be rendered and voxelized. VoMP aggregates per-voxel multi-view features and passes them to our trained Geometry Transformer to predict per-voxel material latent codes. These latents reside on a manifold of physically plausible materials, which we learn from a real-world dataset, guaranteeing the validity of decoded per-voxel materials. To obtain object-level training data, we propose an annotation pipeline combining knowledge from segmented 3D datasets, material databases, and a vision-language model, along with a new benchmark. Experiments show that VoMP estimates accurate volumetric properties, far outperforming prior art in accuracy and speed.
Multi-Agent Path Planning with Asymmetric Interactions In Tight Spaces
Apr 01, 2022
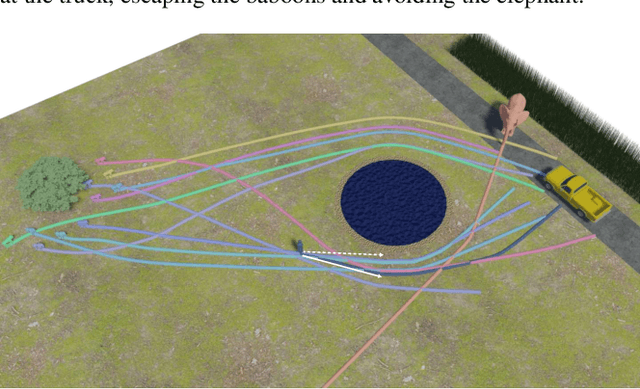
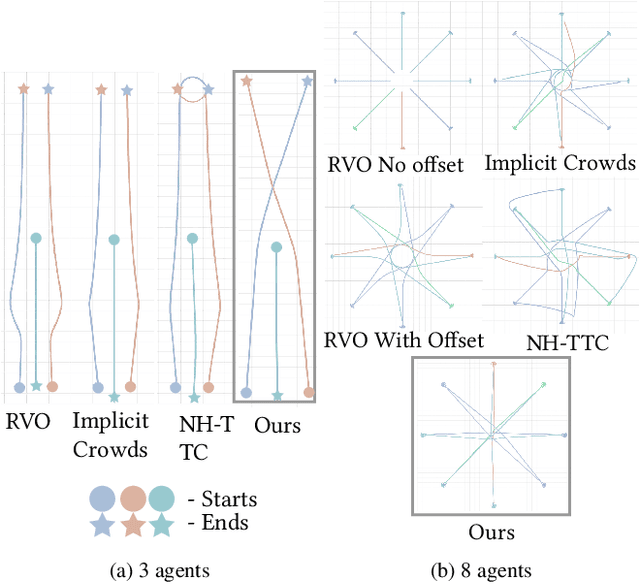
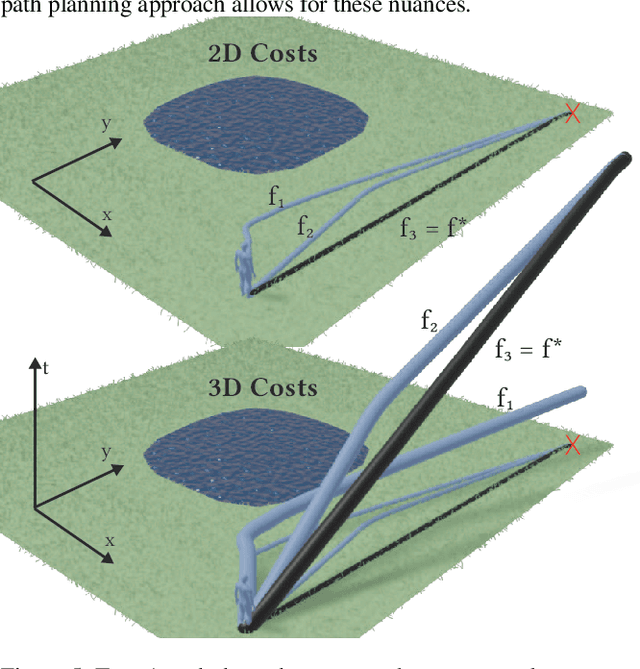
By starting with the assumption that motion is fundamentally a decision making problem, we use the world-line concept from Special Relativity as the inspiration for a novel multi-agent path planning method. We have identified a particular set of problems that have so far been overlooked by previous works. We present our solution for the global path planning problem for each agent and ensure smooth local collision avoidance for each pair of agents in the scene. We accomplish this by modeling the trajectories of the agents through 2D space and time as curves in 3D. Global path planning is solved using a modified Djikstra's algorithm to ensure that initial trajectories for agents do not intersect. We then solve for smooth local trajectories using a quasi-Newton interior point solver, providing the trajectory curves with a radius to turn them into rods. Subsequently, resolving collision of the rods ensures that no two agents are in the same spatial position at the same time. This space-time formulation allows us to simulate previously ignored phenomena such as highly asymmetric interactions in very constrained environments. It also provides a solution for scenes with unnaturally symmetric agent alignments without the need for jittering agent positions or velocities.