 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGemma 3 Technical Report
Mar 25, 2025We introduce Gemma 3, a multimodal addition to the Gemma family of lightweight open models, ranging in scale from 1 to 27 billion parameters. This version introduces vision understanding abilities, a wider coverage of languages and longer context - at least 128K tokens. We also change the architecture of the model to reduce the KV-cache memory that tends to explode with long context. This is achieved by increasing the ratio of local to global attention layers, and keeping the span on local attention short. The Gemma 3 models are trained with distillation and achieve superior performance to Gemma 2 for both pre-trained and instruction finetuned versions. In particular, our novel post-training recipe significantly improves the math, chat, instruction-following and multilingual abilities, making Gemma3-4B-IT competitive with Gemma2-27B-IT and Gemma3-27B-IT comparable to Gemini-1.5-Pro across benchmarks. We release all our models to the community.
Scaling 4D Representations
Dec 19, 2024



Scaling has not yet been convincingly demonstrated for pure self-supervised learning from video. However, prior work has focused evaluations on semantic-related tasks $\unicode{x2013}$ action classification, ImageNet classification, etc. In this paper we focus on evaluating self-supervised learning on non-semantic vision tasks that are more spatial (3D) and temporal (+1D = 4D), such as camera pose estimation, point and object tracking, and depth estimation. We show that by learning from very large video datasets, masked auto-encoding (MAE) with transformer video models actually scales, consistently improving performance on these 4D tasks, as model size increases from 20M all the way to the largest by far reported self-supervised video model $\unicode{x2013}$ 22B parameters. Rigorous apples-to-apples comparison with many recent image and video models demonstrates the benefits of scaling 4D representations.
Moving Off-the-Grid: Scene-Grounded Video Representations
Nov 08, 2024



Current vision models typically maintain a fixed correspondence between their representation structure and image space. Each layer comprises a set of tokens arranged "on-the-grid," which biases patches or tokens to encode information at a specific spatio(-temporal) location. In this work we present Moving Off-the-Grid (MooG), a self-supervised video representation model that offers an alternative approach, allowing tokens to move "off-the-grid" to better enable them to represent scene elements consistently, even as they move across the image plane through time. By using a combination of cross-attention and positional embeddings we disentangle the representation structure and image structure. We find that a simple self-supervised objective--next frame prediction--trained on video data, results in a set of latent tokens which bind to specific scene structures and track them as they move. We demonstrate the usefulness of MooG's learned representation both qualitatively and quantitatively by training readouts on top of the learned representation on a variety of downstream tasks. We show that MooG can provide a strong foundation for different vision tasks when compared to "on-the-grid" baselines.
RUST: Latent Neural Scene Representations from Unposed Imagery
Nov 25, 2022



Inferring the structure of 3D scenes from 2D observations is a fundamental challenge in computer vision. Recently popularized approaches based on neural scene representations have achieved tremendous impact and have been applied across a variety of applications. One of the major remaining challenges in this space is training a single model which can provide latent representations which effectively generalize beyond a single scene. Scene Representation Transformer (SRT) has shown promise in this direction, but scaling it to a larger set of diverse scenes is challenging and necessitates accurately posed ground truth data. To address this problem, we propose RUST (Really Unposed Scene representation Transformer), a pose-free approach to novel view synthesis trained on RGB images alone. Our main insight is that one can train a Pose Encoder that peeks at the target image and learns a latent pose embedding which is used by the decoder for view synthesis. We perform an empirical investigation into the learned latent pose structure and show that it allows meaningful test-time camera transformations and accurate explicit pose readouts. Perhaps surprisingly, RUST achieves similar quality as methods which have access to perfect camera pose, thereby unlocking the potential for large-scale training of amortized neural scene representations.
Kubric: A scalable dataset generator
Mar 07, 2022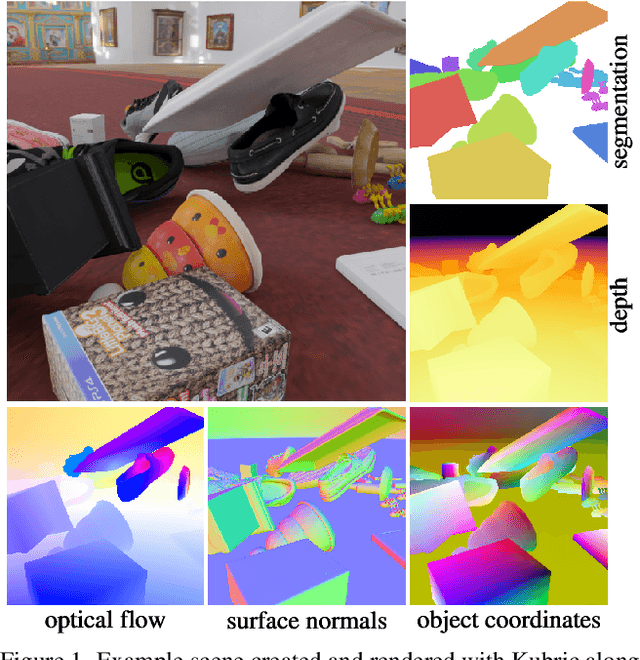
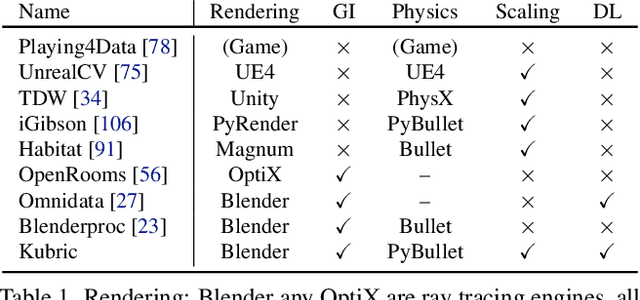
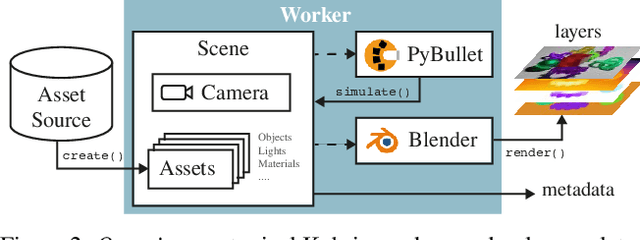
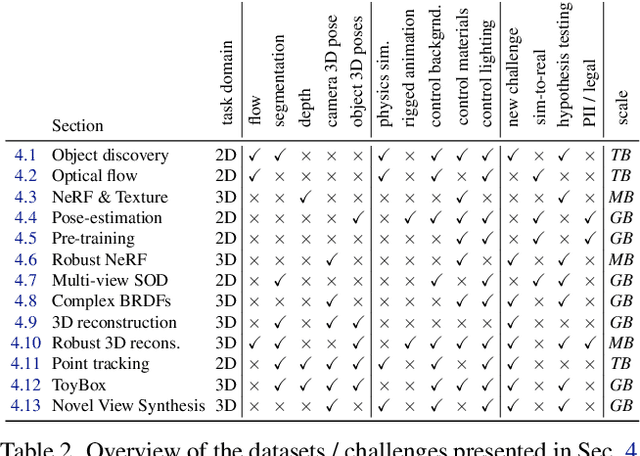
Data is the driving force of machine learning, with the amount and quality of training data often being more important for the performance of a system than architecture and training details. But collecting, processing and annotating real data at scale is difficult, expensive, and frequently raises additional privacy, fairness and legal concerns. Synthetic data is a powerful tool with the potential to address these shortcomings: 1) it is cheap 2) supports rich ground-truth annotations 3) offers full control over data and 4) can circumvent or mitigate problems regarding bias, privacy and licensing. Unfortunately, software tools for effective data generation are less mature than those for architecture design and training, which leads to fragmented generation efforts. To address these problems we introduce Kubric, an open-source Python framework that interfaces with PyBullet and Blender to generate photo-realistic scenes, with rich annotations, and seamlessly scales to large jobs distributed over thousands of machines, and generating TBs of data. We demonstrate the effectiveness of Kubric by presenting a series of 13 different generated datasets for tasks ranging from studying 3D NeRF models to optical flow estimation. We release Kubric, the used assets, all of the generation code, as well as the rendered datasets for reuse and modification.
NeSF: Neural Semantic Fields for Generalizable Semantic Segmentation of 3D Scenes
Dec 03, 2021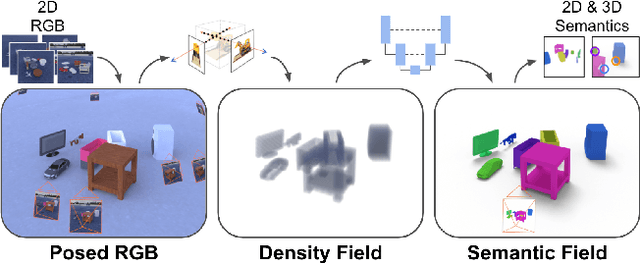
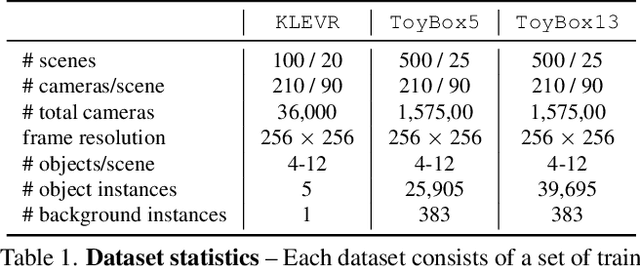

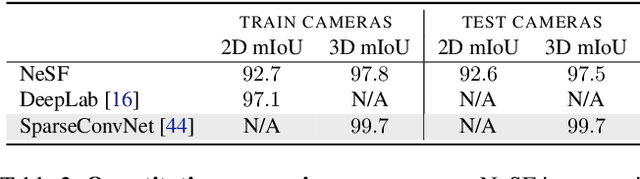
We present NeSF, a method for producing 3D semantic fields from posed RGB images alone. In place of classical 3D representations, our method builds on recent work in implicit neural scene representations wherein 3D structure is captured by point-wise functions. We leverage this methodology to recover 3D density fields upon which we then train a 3D semantic segmentation model supervised by posed 2D semantic maps. Despite being trained on 2D signals alone, our method is able to generate 3D-consistent semantic maps from novel camera poses and can be queried at arbitrary 3D points. Notably, NeSF is compatible with any method producing a density field, and its accuracy improves as the quality of the density field improves. Our empirical analysis demonstrates comparable quality to competitive 2D and 3D semantic segmentation baselines on complex, realistically rendered synthetic scenes. Our method is the first to offer truly dense 3D scene segmentations requiring only 2D supervision for training, and does not require any semantic input for inference on novel scenes. We encourage the readers to visit the project website.
Scene Representation Transformer: Geometry-Free Novel View Synthesis Through Set-Latent Scene Representations
Nov 29, 2021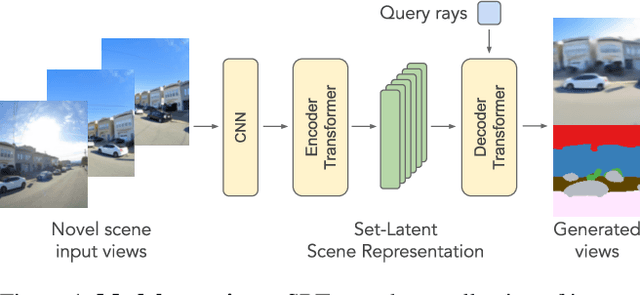
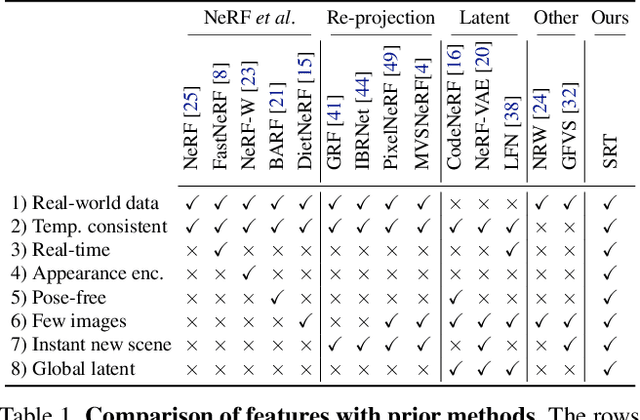
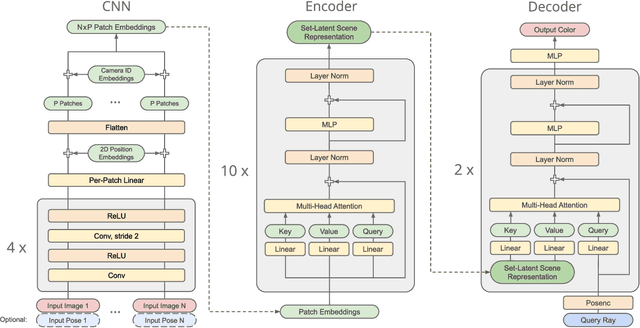
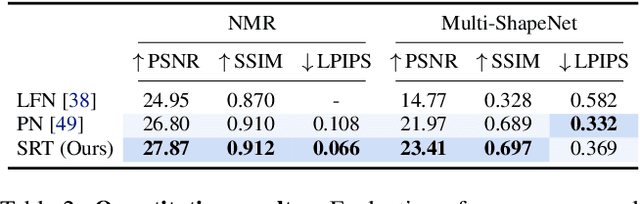
A classical problem in computer vision is to infer a 3D scene representation from few images that can be used to render novel views at interactive rates. Previous work focuses on reconstructing pre-defined 3D representations, e.g. textured meshes, or implicit representations, e.g. radiance fields, and often requires input images with precise camera poses and long processing times for each novel scene. In this work, we propose the Scene Representation Transformer (SRT), a method which processes posed or unposed RGB images of a new area, infers a "set-latent scene representation", and synthesises novel views, all in a single feed-forward pass. To calculate the scene representation, we propose a generalization of the Vision Transformer to sets of images, enabling global information integration, and hence 3D reasoning. An efficient decoder transformer parameterizes the light field by attending into the scene representation to render novel views. Learning is supervised end-to-end by minimizing a novel-view reconstruction error. We show that this method outperforms recent baselines in terms of PSNR and speed on synthetic datasets, including a new dataset created for the paper. Further, we demonstrate that SRT scales to support interactive visualization and semantic segmentation of real-world outdoor environments using Street View imagery.
Self-supervisory Signals for Object Discovery and Detection
Jun 08, 2018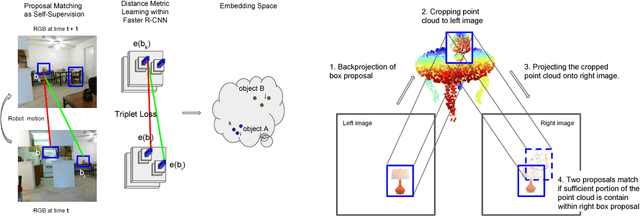

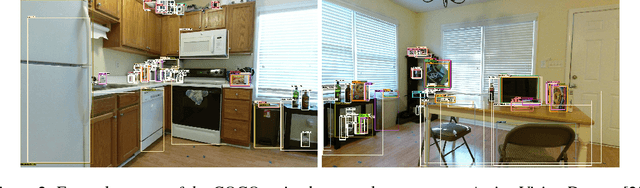
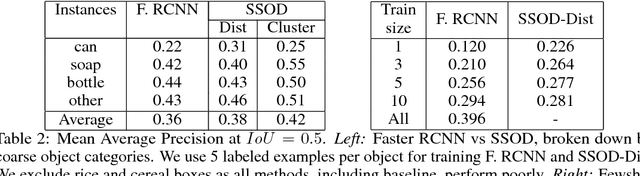
In robotic applications, we often face the challenge of discovering new objects while having very little or no labelled training data. In this paper we explore the use of self-supervision provided by a robot traversing an environment to learn representations of encountered objects. Knowledge of ego-motion and depth perception enables the agent to effectively associate multiple object proposals, which serve as training data for learning object representations from unlabelled images. We demonstrate the utility of this representation in two ways. First, we can automatically discover objects by performing clustering in the learned embedding space. Each resulting cluster contains examples of one instance seen from various viewpoints and scales. Second, given a small number of labeled images, we can efficiently learn detectors for these labels. In the few-shot regime, these detectors have a substantially higher mAP of 0.22 compared to 0.12 of off-the-shelf standard detectors trained on this limited data. Thus, the proposed self-supervision results in effective environment specific object discovery and detection at no or very small human labeling cost.
Generating Wikipedia by Summarizing Long Sequences
Jan 30, 2018
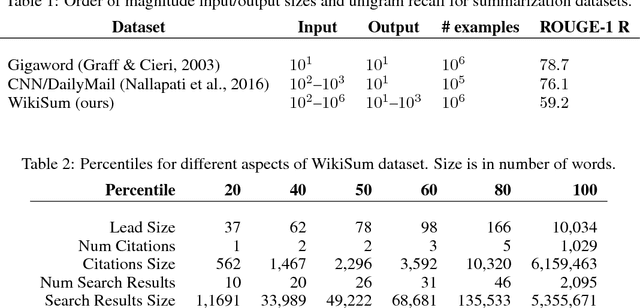
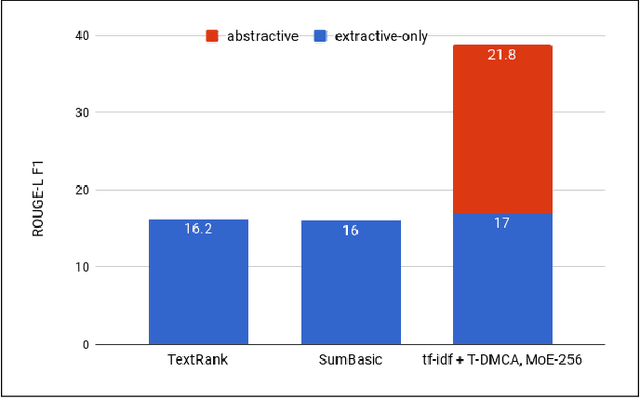

We show that generating English Wikipedia articles can be approached as a multi- document summarization of source documents. We use extractive summarization to coarsely identify salient information and a neural abstractive model to generate the article. For the abstractive model, we introduce a decoder-only architecture that can scalably attend to very long sequences, much longer than typical encoder- decoder architectures used in sequence transduction. We show that this model can generate fluent, coherent multi-sentence paragraphs and even whole Wikipedia articles. When given reference documents, we show it can extract relevant factual information as reflected in perplexity, ROUGE scores and human evaluations.