 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBMD-45: A Large-Scale CCTV Vehicle Detection Dataset for Urban Traffic in Developing Cities
Apr 27, 2026Robust vehicle detection from fixed CCTV cameras is critical for Intelligent Transportation Systems. Yet existing benchmarks predominantly feature relatively homogeneous, highly organized traffic patterns captured from ego-centric driving perspectives or controlled aerial views. This regional and sensor view bias creates a significant gap. Models trained on datasets such as UA-DETRAC and COCO struggle to generalize to the dense, heterogeneous, disorganized traffic conditions observed in rapidly developing urban centers in emerging economies. To address this limitation, we introduce BMD-45, a large-scale dataset comprising 480K bounding boxes annotated over 45K images captured from over 3.6K operational Safe City CCTV cameras. BMD-45 contains 14 fine-grained vehicle categories, including region-specific modes such as auto-rickshaws and tempo travellers, which are not present in existing benchmarks. The dataset captures real-world deployment challenges, including extreme viewpoint variation, occlusion, and vehicle density . We establish comprehensive baselines using state-of-the-art detectors and reveal a striking domain gap: models fine-tuned on UA-DETRAC achieve only 33.6% mAP@0.50:0.95, compared to 83.8% when trained in-domain on BMD-45, representing a 2.5x improvement that persists even when accounting for novel vehicle classes. This performance gap underscores the critical need for geographically diverse traffic benchmarks and establishes BMD-45 as a baseline for developing robust perception systems in underrepresented urban environments worldwide. The dataset is available at: https://huggingface.co/datasets/iisc-aim/BMD-45.
PTLD: Sim-to-real Privileged Tactile Latent Distillation for Dexterous Manipulation
Mar 04, 2026Tactile dexterous manipulation is essential to automating complex household tasks, yet learning effective control policies remains a challenge. While recent work has relied on imitation learning, obtaining high quality demonstrations for multi-fingered hands via robot teleoperation or kinesthetic teaching is prohibitive. Alternatively, with reinforcement we can learn skills in simulation, but fast and realistic simulation of tactile observations is challenging. To bridge this gap, we introduce PTLD: sim-to-real Privileged Tactile Latent Distillation, a novel approach to learning tactile manipulation skills without requiring tactile simulation. Instead of simulating tactile sensors or relying purely on proprioceptive policies to transfer zero-shot sim-to-real, our key idea is to leverage privileged sensors in the real world to collect real-world tactile policy data. This data is then used to distill a robust state estimator that operates on tactile input. We demonstrate from our experiments that PTLD can be used to improve proprioceptive manipulation policies trained in simulation significantly by incorporating tactile sensing. On the benchmark in-hand rotation task, PTLD achieves a 182% improvement over a proprioception only policy. We also show that PTLD enables learning the challenging task of tactile in-hand reorientation where we see a 57% improvement in the number of goals reached over using proprioception alone. Website: https://akashsharma02.github.io/ptld-website/.
TactAlign: Human-to-Robot Policy Transfer via Tactile Alignment
Feb 14, 2026Human demonstrations collected by wearable devices (e.g., tactile gloves) provide fast and dexterous supervision for policy learning, and are guided by rich, natural tactile feedback. However, a key challenge is how to transfer human-collected tactile signals to robots despite the differences in sensing modalities and embodiment. Existing human-to-robot (H2R) approaches that incorporate touch often assume identical tactile sensors, require paired data, and involve little to no embodiment gap between human demonstrator and the robots, limiting scalability and generality. We propose TactAlign, a cross-embodiment tactile alignment method that transfers human-collected tactile signals to a robot with different embodiment. TactAlign transforms human and robot tactile observations into a shared latent representation using a rectified flow, without paired datasets, manual labels, or privileged information. Our method enables low-cost latent transport guided by hand-object interaction-derived pseudo-pairs. We demonstrate that TactAlign improves H2R policy transfer across multiple contact-rich tasks (pivoting, insertion, lid closing), generalizes to unseen objects and tasks with human data (less than 5 minutes), and enables zero-shot H2R transfer on a highly dexterous tasks (light bulb screwing).
Any4D: Unified Feed-Forward Metric 4D Reconstruction
Dec 11, 2025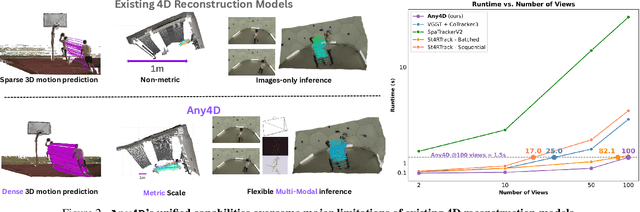
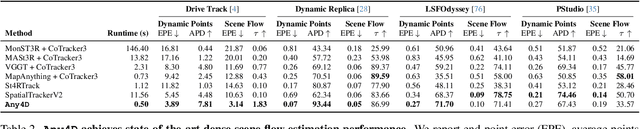
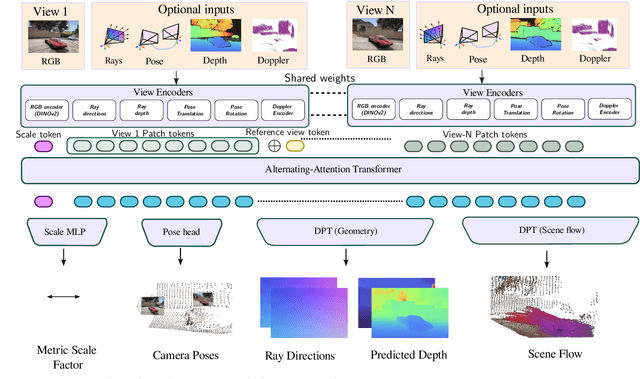
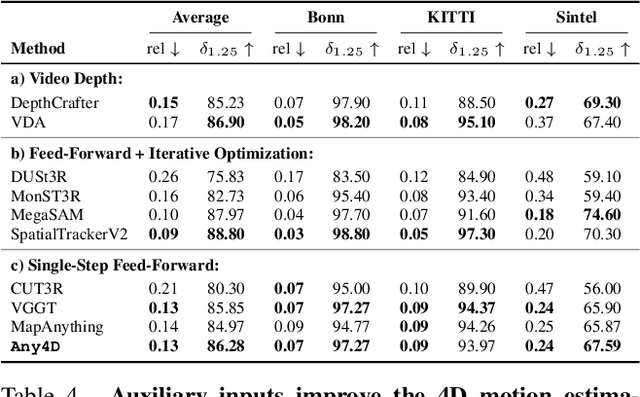
We present Any4D, a scalable multi-view transformer for metric-scale, dense feed-forward 4D reconstruction. Any4D directly generates per-pixel motion and geometry predictions for N frames, in contrast to prior work that typically focuses on either 2-view dense scene flow or sparse 3D point tracking. Moreover, unlike other recent methods for 4D reconstruction from monocular RGB videos, Any4D can process additional modalities and sensors such as RGB-D frames, IMU-based egomotion, and Radar Doppler measurements, when available. One of the key innovations that allows for such a flexible framework is a modular representation of a 4D scene; specifically, per-view 4D predictions are encoded using a variety of egocentric factors (depthmaps and camera intrinsics) represented in local camera coordinates, and allocentric factors (camera extrinsics and scene flow) represented in global world coordinates. We achieve superior performance across diverse setups - both in terms of accuracy (2-3X lower error) and compute efficiency (15X faster), opening avenues for multiple downstream applications.
SPIDER: Scalable Physics-Informed Dexterous Retargeting
Nov 12, 2025Learning dexterous and agile policy for humanoid and dexterous hand control requires large-scale demonstrations, but collecting robot-specific data is prohibitively expensive. In contrast, abundant human motion data is readily available from motion capture, videos, and virtual reality, which could help address the data scarcity problem. However, due to the embodiment gap and missing dynamic information like force and torque, these demonstrations cannot be directly executed on robots. To bridge this gap, we propose Scalable Physics-Informed DExterous Retargeting (SPIDER), a physics-based retargeting framework to transform and augment kinematic-only human demonstrations to dynamically feasible robot trajectories at scale. Our key insight is that human demonstrations should provide global task structure and objective, while large-scale physics-based sampling with curriculum-style virtual contact guidance should refine trajectories to ensure dynamical feasibility and correct contact sequences. SPIDER scales across diverse 9 humanoid/dexterous hand embodiments and 6 datasets, improving success rates by 18% compared to standard sampling, while being 10X faster than reinforcement learning (RL) baselines, and enabling the generation of a 2.4M frames dynamic-feasible robot dataset for policy learning. As a universal physics-based retargeting method, SPIDER can work with diverse quality data and generate diverse and high-quality data to enable efficient policy learning with methods like RL.
Tactile Beyond Pixels: Multisensory Touch Representations for Robot Manipulation
Jun 17, 2025We present Sparsh-X, the first multisensory touch representations across four tactile modalities: image, audio, motion, and pressure. Trained on ~1M contact-rich interactions collected with the Digit 360 sensor, Sparsh-X captures complementary touch signals at diverse temporal and spatial scales. By leveraging self-supervised learning, Sparsh-X fuses these modalities into a unified representation that captures physical properties useful for robot manipulation tasks. We study how to effectively integrate real-world touch representations for both imitation learning and tactile adaptation of sim-trained policies, showing that Sparsh-X boosts policy success rates by 63% over an end-to-end model using tactile images and improves robustness by 90% in recovering object states from touch. Finally, we benchmark Sparsh-X ability to make inferences about physical properties, such as object-action identification, material-quantity estimation, and force estimation. Sparsh-X improves accuracy in characterizing physical properties by 48% compared to end-to-end approaches, demonstrating the advantages of multisensory pretraining for capturing features essential for dexterous manipulation.
Self-supervised perception for tactile skin covered dexterous hands
May 16, 2025We present Sparsh-skin, a pre-trained encoder for magnetic skin sensors distributed across the fingertips, phalanges, and palm of a dexterous robot hand. Magnetic tactile skins offer a flexible form factor for hand-wide coverage with fast response times, in contrast to vision-based tactile sensors that are restricted to the fingertips and limited by bandwidth. Full hand tactile perception is crucial for robot dexterity. However, a lack of general-purpose models, challenges with interpreting magnetic flux and calibration have limited the adoption of these sensors. Sparsh-skin, given a history of kinematic and tactile sensing across a hand, outputs a latent tactile embedding that can be used in any downstream task. The encoder is self-supervised via self-distillation on a variety of unlabeled hand-object interactions using an Allegro hand sensorized with Xela uSkin. In experiments across several benchmark tasks, from state estimation to policy learning, we find that pretrained Sparsh-skin representations are both sample efficient in learning downstream tasks and improve task performance by over 41% compared to prior work and over 56% compared to end-to-end learning.
DexterityGen: Foundation Controller for Unprecedented Dexterity
Feb 06, 2025



Teaching robots dexterous manipulation skills, such as tool use, presents a significant challenge. Current approaches can be broadly categorized into two strategies: human teleoperation (for imitation learning) and sim-to-real reinforcement learning. The first approach is difficult as it is hard for humans to produce safe and dexterous motions on a different embodiment without touch feedback. The second RL-based approach struggles with the domain gap and involves highly task-specific reward engineering on complex tasks. Our key insight is that RL is effective at learning low-level motion primitives, while humans excel at providing coarse motion commands for complex, long-horizon tasks. Therefore, the optimal solution might be a combination of both approaches. In this paper, we introduce DexterityGen (DexGen), which uses RL to pretrain large-scale dexterous motion primitives, such as in-hand rotation or translation. We then leverage this learned dataset to train a dexterous foundational controller. In the real world, we use human teleoperation as a prompt to the controller to produce highly dexterous behavior. We evaluate the effectiveness of DexGen in both simulation and real world, demonstrating that it is a general-purpose controller that can realize input dexterous manipulation commands and significantly improves stability by 10-100x measured as duration of holding objects across diverse tasks. Notably, with DexGen we demonstrate unprecedented dexterous skills including diverse object reorientation and dexterous tool use such as pen, syringe, and screwdriver for the first time.
Sparsh: Self-supervised touch representations for vision-based tactile sensing
Oct 31, 2024In this work, we introduce general purpose touch representations for the increasingly accessible class of vision-based tactile sensors. Such sensors have led to many recent advances in robot manipulation as they markedly complement vision, yet solutions today often rely on task and sensor specific handcrafted perception models. Collecting real data at scale with task centric ground truth labels, like contact forces and slip, is a challenge further compounded by sensors of various form factor differing in aspects like lighting and gel markings. To tackle this we turn to self-supervised learning (SSL) that has demonstrated remarkable performance in computer vision. We present Sparsh, a family of SSL models that can support various vision-based tactile sensors, alleviating the need for custom labels through pre-training on 460k+ tactile images with masking and self-distillation in pixel and latent spaces. We also build TacBench, to facilitate standardized benchmarking across sensors and models, comprising of six tasks ranging from comprehending tactile properties to enabling physical perception and manipulation planning. In evaluations, we find that SSL pre-training for touch representation outperforms task and sensor-specific end-to-end training by 95.1% on average over TacBench, and Sparsh (DINO) and Sparsh (IJEPA) are the most competitive, indicating the merits of learning in latent space for tactile images. Project page: https://sparsh-ssl.github.io/
Sampling and estimation on manifolds using the Langevin diffusion
Dec 22, 2023Error bounds are derived for sampling and estimation using a discretization of an intrinsically defined Langevin diffusion with invariant measure $d\mu_\phi \propto e^{-\phi} \mathrm{dvol}_g $ on a compact Riemannian manifold. Two estimators of linear functionals of $\mu_\phi $ based on the discretized Markov process are considered: a time-averaging estimator based on a single trajectory and an ensemble-averaging estimator based on multiple independent trajectories. Imposing no restrictions beyond a nominal level of smoothness on $\phi$, first-order error bounds, in discretization step size, on the bias and variances of both estimators are derived. The order of error matches the optimal rate in Euclidean and flat spaces, and leads to a first-order bound on distance between the invariant measure $\mu_\phi$ and a stationary measure of the discretized Markov process. Generality of the proof techniques, which exploit links between two partial differential equations and the semigroup of operators corresponding to the Langevin diffusion, renders them amenable for the study of a more general class of sampling algorithms related to the Langevin diffusion. Conditions for extending analysis to the case of non-compact manifolds are discussed. Numerical illustrations with distributions, log-concave and otherwise, on the manifolds of positive and negative curvature elucidate on the derived bounds and demonstrate practical utility of the sampling algorithm.