 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisuo-Tactile World Models
Feb 05, 2026We introduce multi-task Visuo-Tactile World Models (VT-WM), which capture the physics of contact through touch reasoning. By complementing vision with tactile sensing, VT-WM better understands robot-object interactions in contact-rich tasks, avoiding common failure modes of vision-only models under occlusion or ambiguous contact states, such as objects disappearing, teleporting, or moving in ways that violate basic physics. Trained across a set of contact-rich manipulation tasks, VT-WM improves physical fidelity in imagination, achieving 33% better performance at maintaining object permanence and 29% better compliance with the laws of motion in autoregressive rollouts. Moreover, experiments show that grounding in contact dynamics also translates to planning. In zero-shot real-robot experiments, VT-WM achieves up to 35% higher success rates, with the largest gains in multi-step, contact-rich tasks. Finally, VT-WM demonstrates significant downstream versatility, effectively adapting its learned contact dynamics to a novel task and achieving reliable planning success with only a limited set of demonstrations.
Tactile Beyond Pixels: Multisensory Touch Representations for Robot Manipulation
Jun 17, 2025We present Sparsh-X, the first multisensory touch representations across four tactile modalities: image, audio, motion, and pressure. Trained on ~1M contact-rich interactions collected with the Digit 360 sensor, Sparsh-X captures complementary touch signals at diverse temporal and spatial scales. By leveraging self-supervised learning, Sparsh-X fuses these modalities into a unified representation that captures physical properties useful for robot manipulation tasks. We study how to effectively integrate real-world touch representations for both imitation learning and tactile adaptation of sim-trained policies, showing that Sparsh-X boosts policy success rates by 63% over an end-to-end model using tactile images and improves robustness by 90% in recovering object states from touch. Finally, we benchmark Sparsh-X ability to make inferences about physical properties, such as object-action identification, material-quantity estimation, and force estimation. Sparsh-X improves accuracy in characterizing physical properties by 48% compared to end-to-end approaches, demonstrating the advantages of multisensory pretraining for capturing features essential for dexterous manipulation.
Self-supervised perception for tactile skin covered dexterous hands
May 16, 2025We present Sparsh-skin, a pre-trained encoder for magnetic skin sensors distributed across the fingertips, phalanges, and palm of a dexterous robot hand. Magnetic tactile skins offer a flexible form factor for hand-wide coverage with fast response times, in contrast to vision-based tactile sensors that are restricted to the fingertips and limited by bandwidth. Full hand tactile perception is crucial for robot dexterity. However, a lack of general-purpose models, challenges with interpreting magnetic flux and calibration have limited the adoption of these sensors. Sparsh-skin, given a history of kinematic and tactile sensing across a hand, outputs a latent tactile embedding that can be used in any downstream task. The encoder is self-supervised via self-distillation on a variety of unlabeled hand-object interactions using an Allegro hand sensorized with Xela uSkin. In experiments across several benchmark tasks, from state estimation to policy learning, we find that pretrained Sparsh-skin representations are both sample efficient in learning downstream tasks and improve task performance by over 41% compared to prior work and over 56% compared to end-to-end learning.
Sparsh: Self-supervised touch representations for vision-based tactile sensing
Oct 31, 2024In this work, we introduce general purpose touch representations for the increasingly accessible class of vision-based tactile sensors. Such sensors have led to many recent advances in robot manipulation as they markedly complement vision, yet solutions today often rely on task and sensor specific handcrafted perception models. Collecting real data at scale with task centric ground truth labels, like contact forces and slip, is a challenge further compounded by sensors of various form factor differing in aspects like lighting and gel markings. To tackle this we turn to self-supervised learning (SSL) that has demonstrated remarkable performance in computer vision. We present Sparsh, a family of SSL models that can support various vision-based tactile sensors, alleviating the need for custom labels through pre-training on 460k+ tactile images with masking and self-distillation in pixel and latent spaces. We also build TacBench, to facilitate standardized benchmarking across sensors and models, comprising of six tasks ranging from comprehending tactile properties to enabling physical perception and manipulation planning. In evaluations, we find that SSL pre-training for touch representation outperforms task and sensor-specific end-to-end training by 95.1% on average over TacBench, and Sparsh (DINO) and Sparsh (IJEPA) are the most competitive, indicating the merits of learning in latent space for tactile images. Project page: https://sparsh-ssl.github.io/
Perceiving Extrinsic Contacts from Touch Improves Learning Insertion Policies
Sep 28, 2023



Robotic manipulation tasks such as object insertion typically involve interactions between object and environment, namely extrinsic contacts. Prior work on Neural Contact Fields (NCF) use intrinsic tactile sensing between gripper and object to estimate extrinsic contacts in simulation. However, its effectiveness and utility in real-world tasks remains unknown. In this work, we improve NCF to enable sim-to-real transfer and use it to train policies for mug-in-cupholder and bowl-in-dishrack insertion tasks. We find our model NCF-v2, is capable of estimating extrinsic contacts in the real-world. Furthermore, our insertion policy with NCF-v2 outperforms policies without it, achieving 33% higher success and 1.36x faster execution on mug-in-cupholder, and 13% higher success and 1.27x faster execution on bowl-in-dishrack.
Learning to Read Braille: Bridging the Tactile Reality Gap with Diffusion Models
Apr 03, 2023Simulating vision-based tactile sensors enables learning models for contact-rich tasks when collecting real world data at scale can be prohibitive. However, modeling the optical response of the gel deformation as well as incorporating the dynamics of the contact makes sim2real challenging. Prior works have explored data augmentation, fine-tuning, or learning generative models to reduce the sim2real gap. In this work, we present the first method to leverage probabilistic diffusion models for capturing complex illumination changes from gel deformations. Our tactile diffusion model is able to generate realistic tactile images from simulated contact depth bridging the reality gap for vision-based tactile sensing. On real braille reading task with a DIGIT sensor, a classifier trained with our diffusion model achieves 75.74% accuracy outperforming classifiers trained with simulation and other approaches. Project page: https://github.com/carolinahiguera/Tactile-Diffusion
Neural Contact Fields: Tracking Extrinsic Contact with Tactile Sensing
Oct 17, 2022
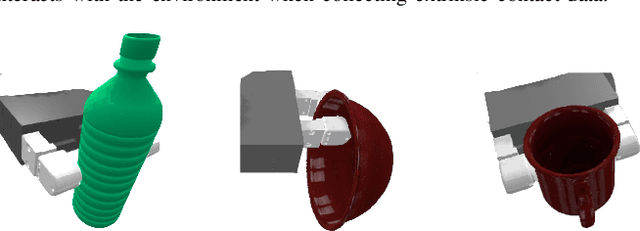
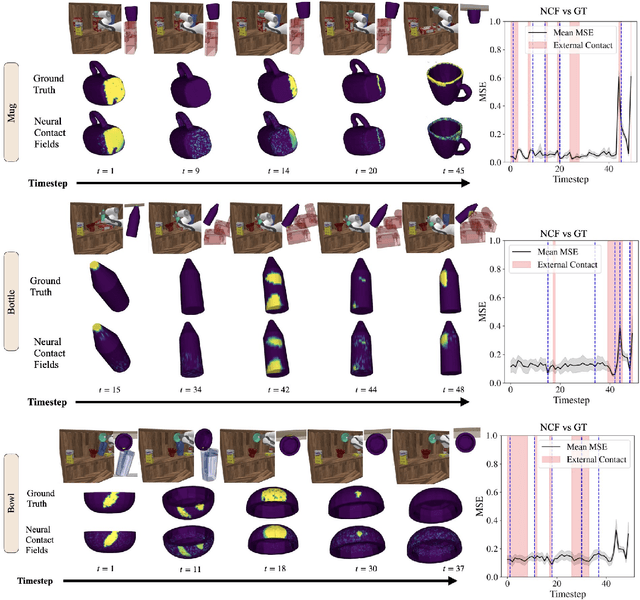
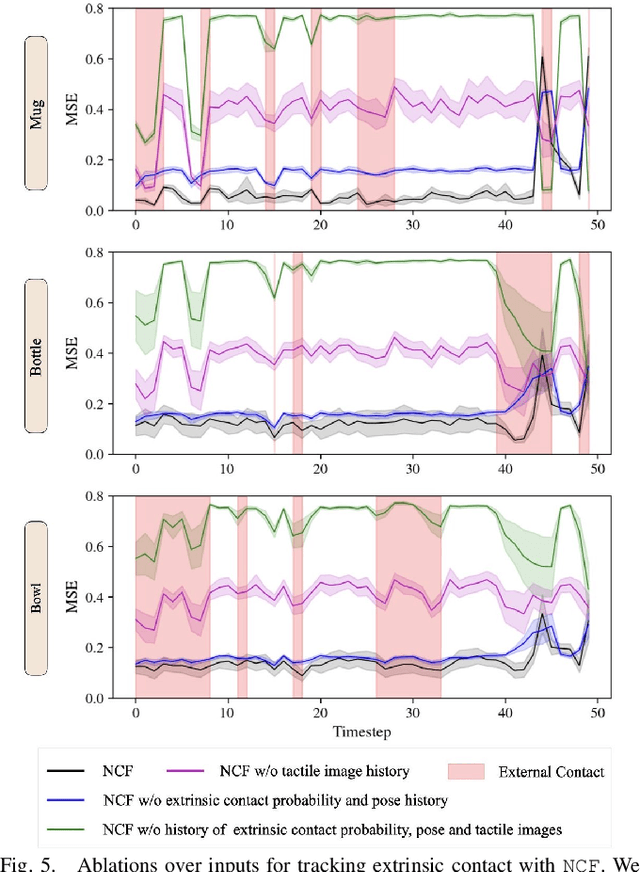
We present Neural Contact Fields, a method that brings together neural fields and tactile sensing to address the problem of tracking extrinsic contact between object and environment. Knowing where the external contact occurs is a first step towards methods that can actively control it in facilitating downstream manipulation tasks. Prior work for localizing environmental contacts typically assume a contact type (e.g. point or line), does not capture contact/no-contact transitions, and only works with basic geometric-shaped objects. Neural Contact Fields are the first method that can track arbitrary multi-modal extrinsic contacts without making any assumptions about the contact type. Our key insight is to estimate the probability of contact for any 3D point in the latent space of object shapes, given vision-based tactile inputs that sense the local motion resulting from the external contact. In experiments, we find that Neural Contact Fields are able to localize multiple contact patches without making any assumptions about the geometry of the contact, and capture contact/no-contact transitions for known categories of objects with unseen shapes in unseen environment configurations. In addition to Neural Contact Fields, we also release our YCB-Extrinsic-Contact dataset of simulated extrinsic contact interactions to enable further research in this area. Project repository: https://github.com/carolinahiguera/NCF