 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
HDL: Hybrid Deep Learning for the Synthesis of Myocardial Velocity Maps in Digital Twins for Cardiac Analysis
Mar 09, 2022
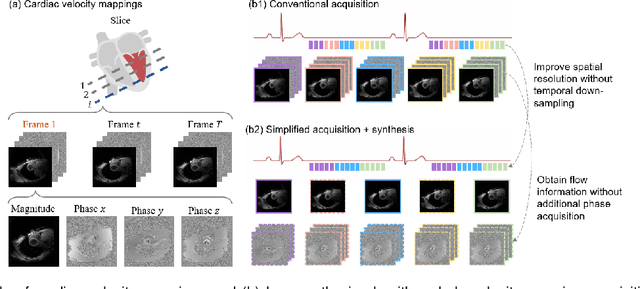
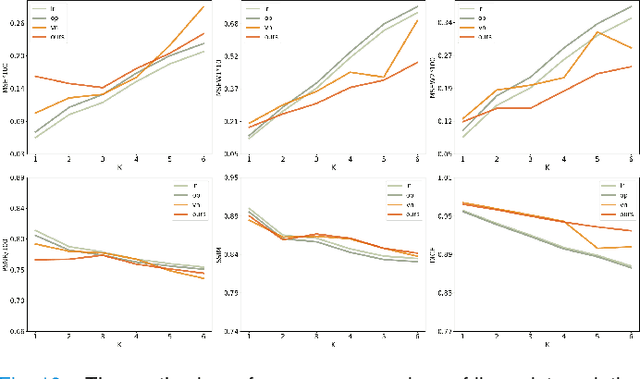
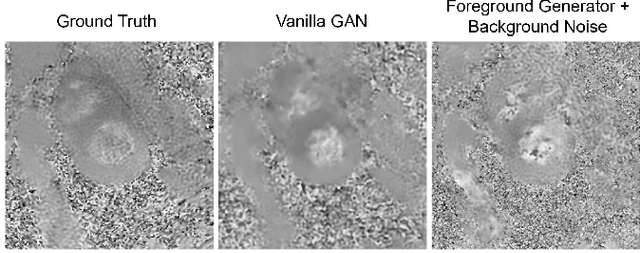
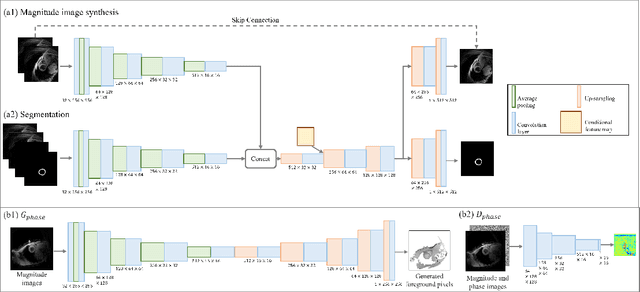
Synthetic digital twins based on medical data accelerate the acquisition, labelling and decision making procedure in digital healthcare. A core part of digital healthcare twins is model-based data synthesis, which permits the generation of realistic medical signals without requiring to cope with the modelling complexity of anatomical and biochemical phenomena producing them in reality. Unfortunately, algorithms for cardiac data synthesis have been so far scarcely studied in the literature. An important imaging modality in the cardiac examination is three-directional CINE multi-slice myocardial velocity mapping (3Dir MVM), which provides a quantitative assessment of cardiac motion in three orthogonal directions of the left ventricle. The long acquisition time and complex acquisition produce make it more urgent to produce synthetic digital twins of this imaging modality. In this study, we propose a hybrid deep learning (HDL) network, especially for synthetic 3Dir MVM data. Our algorithm is featured by a hybrid UNet and a Generative Adversarial Network with a foreground-background generation scheme. The experimental results show that from temporally down-sampled magnitude CINE images (six times), our proposed algorithm can still successfully synthesise high temporal resolution 3Dir MVM CMR data (PSNR=42.32) with precise left ventricle segmentation (DICE=0.92). These performance scores indicate that our proposed HDL algorithm can be implemented in real-world digital twins for myocardial velocity mapping data simulation. To the best of our knowledge, this work is the first one in the literature investigating digital twins of the 3Dir MVM CMR, which has shown great potential for improving the efficiency of clinical studies via synthesised cardiac data.
YolactEdge: Real-time Instance Segmentation on the Edge (Jetson AGX Xavier: 30 FPS, RTX 2080 Ti: 170 FPS)
Dec 22, 2020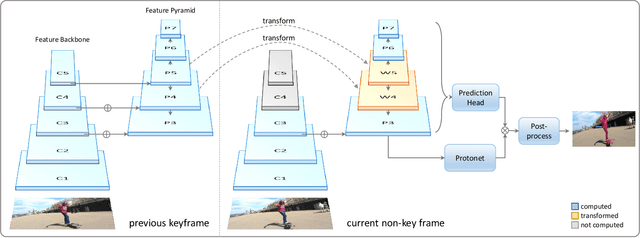
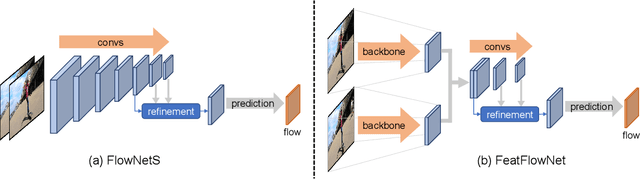
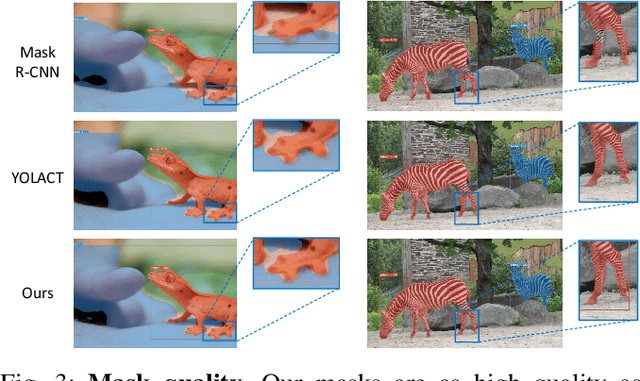
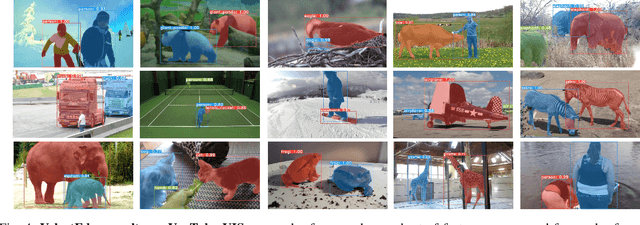
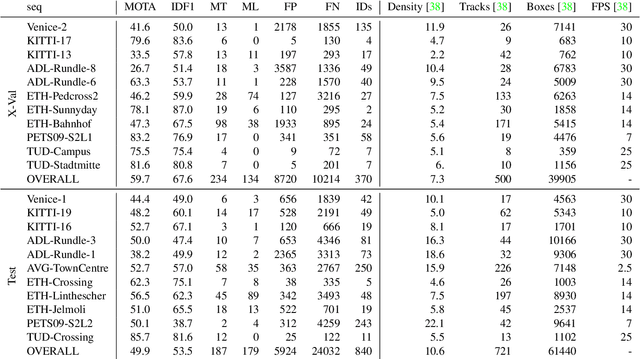
We propose YolactEdge, the first competitive instance segmentation approach that runs on small edge devices at real-time speeds. Specifically, YolactEdge runs at up to 30.8 FPS on a Jetson AGX Xavier (and 172.7 FPS on an RTX 2080 Ti) with a ResNet-101 backbone on 550x550 resolution images. To achieve this, we make two improvements to the state-of-the-art image-based real-time method YOLACT: (1) TensorRT optimization while carefully trading off speed and accuracy, and (2) a novel feature warping module to exploit temporal redundancy in videos. Experiments on the YouTube VIS and MS COCO datasets demonstrate that YolactEdge produces a 3-5x speed up over existing real-time methods while producing competitive mask and box detection accuracy. We also conduct ablation studies to dissect our design choices and modules. Code and models are available at https://github.com/haotian-liu/yolact_edge.
Real-time Uncertainty Decomposition for Online Learning Control
Oct 06, 2020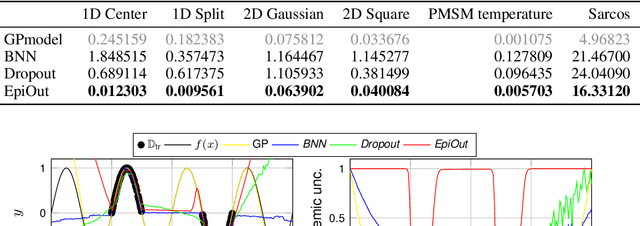
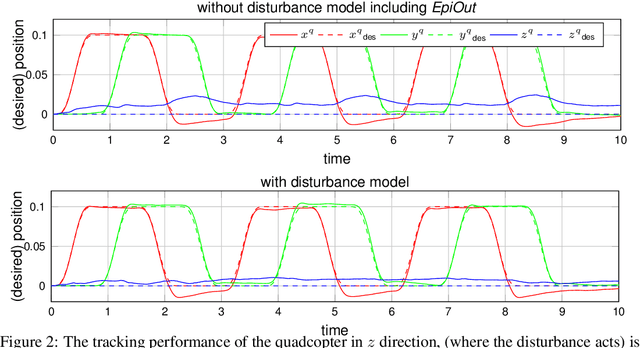


Safety-critical decisions based on machine learning models require a clear understanding of the involved uncertainties to avoid hazardous or risky situations. While aleatoric uncertainty can be explicitly modeled given a parametric description, epistemic uncertainty rather describes the presence or absence of training data. This paper proposes a novel generic method for modeling epistemic uncertainty and shows its advantages over existing approaches for neural networks on various data sets. It can be directly combined with aleatoric uncertainty estimates and allows for prediction in real-time as the inference is sample-free. We exploit this property in a model-based quadcopter control setting and demonstrate how the controller benefits from a differentiation between aleatoric and epistemic uncertainty in online learning of thermal disturbances.
A 5.3 GHz Al0.76Sc0.24N Two-Dimensional Resonant Rods Resonator with a Record kt2 of 23.9%
Feb 26, 2022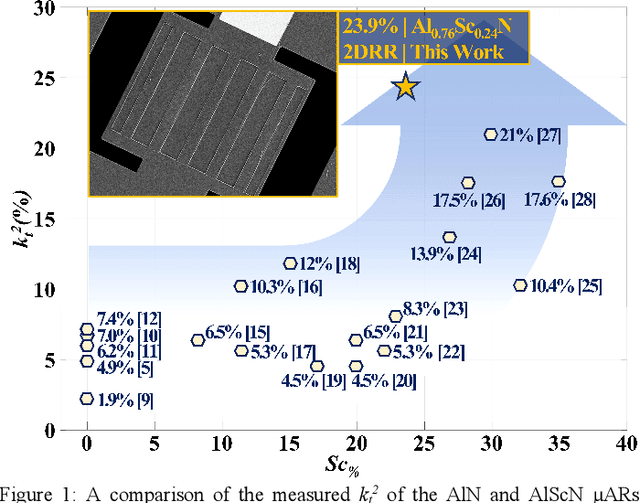
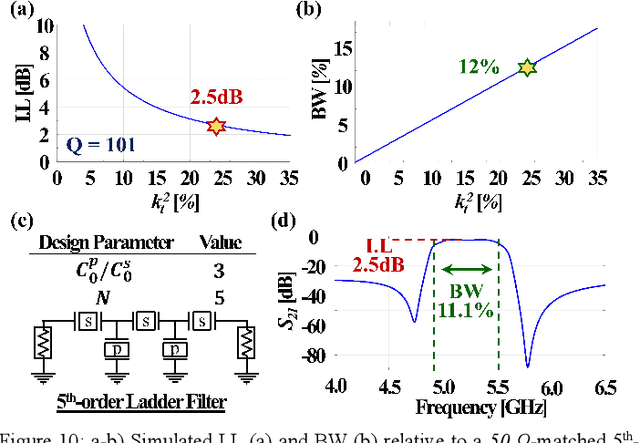
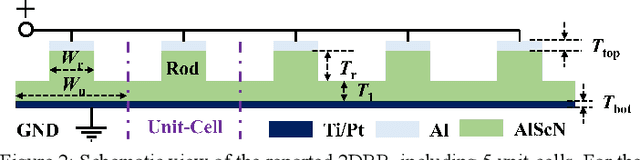
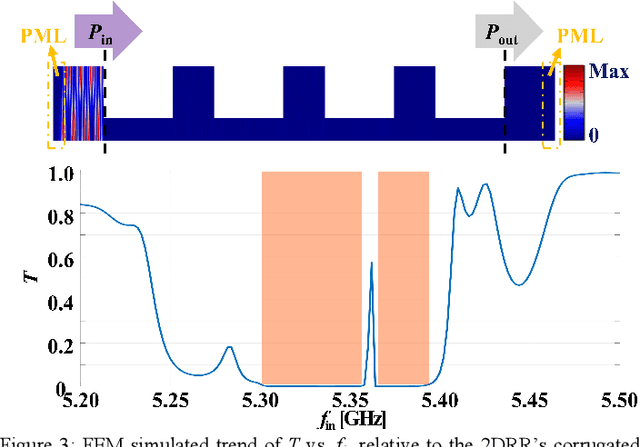
This work reports on the measured performance of an Aluminum Scandium Nitride (AlScN) Two-Dimensional Resonant Rods resonator (2DRR), fabricated by using a Sc-doping concentration of 24%, characterized by an ultra-low impedance (~25 Ohm) and exhibiting an all-time world record electromechanical coupling coefficient (kt2) of 23.9% for AlScN resonators. In order to achieve such unprecedented performance, we identified and relied on optimized deposition and etching processes for highly-doped AlScN films, aiming at achieving high crystalline quality, low density of abnormal grains in the 2DRR's active region and sharp lateral sidewalls. Also, the 2DRR's unit cell has been acoustically engineered to maximize the piezo-generated mechanical energy within each rod and to ensure a low transduction of spurious modes around resonance. Due to its unprecedented kt2, the reported 2DRR opens exciting scenarios towards the development of next-generation monolithic integrated radio-frequency (RF) filtering components. In fact, we show that 5th-order 2DRR-based ladder filters with fractional bandwidths (BW) of ~11%, insertion-loss (I.L) values of ~2.5 dB and with larger than 30 dB out-of-band rejections can now be envisioned, paving an unprecedented path towards the development of ultra-wide band (UWB) filters for next-generation Super-High-Frequency (SHF) radio front-ends.
Adiabatic Quantum Computing for Multi Object Tracking
Feb 17, 2022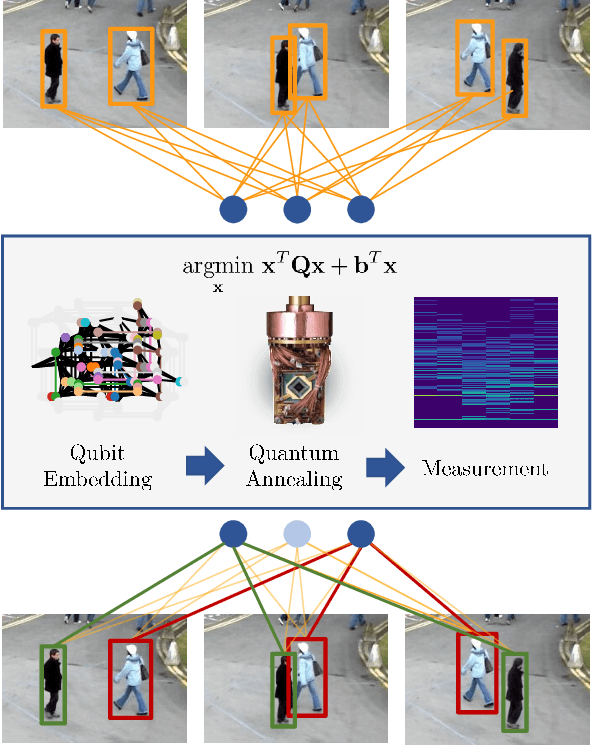
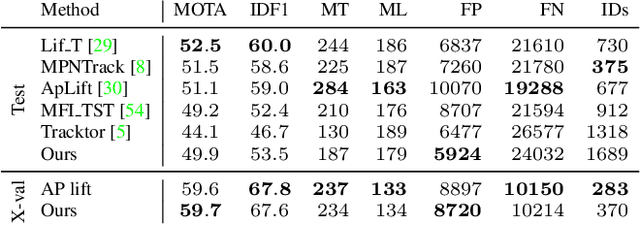
Multi-Object Tracking (MOT) is most often approached in the tracking-by-detection paradigm, where object detections are associated through time. The association step naturally leads to discrete optimization problems. As these optimization problems are often NP-hard, they can only be solved exactly for small instances on current hardware. Adiabatic quantum computing (AQC) offers a solution for this, as it has the potential to provide a considerable speedup on a range of NP-hard optimization problems in the near future. However, current MOT formulations are unsuitable for quantum computing due to their scaling properties. In this work, we therefore propose the first MOT formulation designed to be solved with AQC. We employ an Ising model that represents the quantum mechanical system implemented on the AQC. We show that our approach is competitive compared with state-of-the-art optimization-based approaches, even when using of-the-shelf integer programming solvers. Finally, we demonstrate that our MOT problem is already solvable on the current generation of real quantum computers for small examples, and analyze the properties of the measured solutions.
PyTorch Geometric Signed Directed: A Survey and Software on Graph Neural Networks for Signed and Directed Graphs
Feb 22, 2022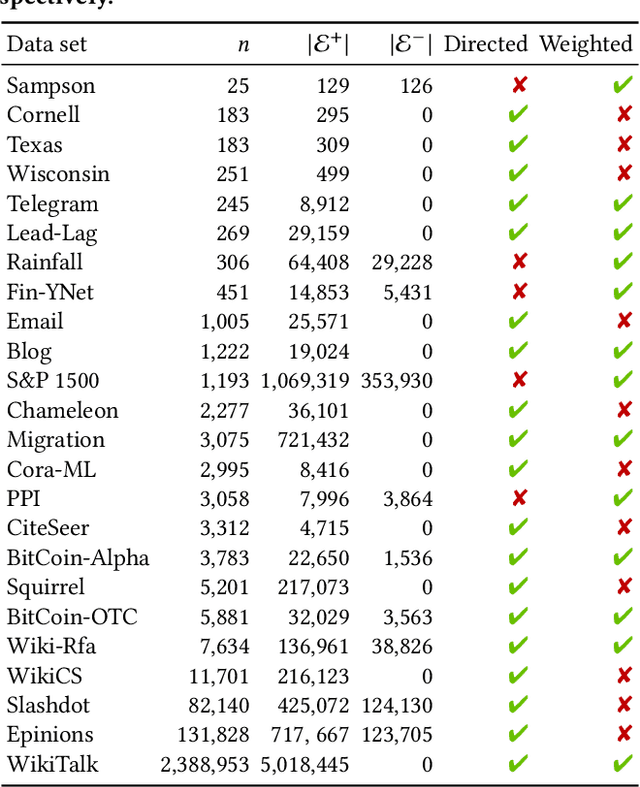
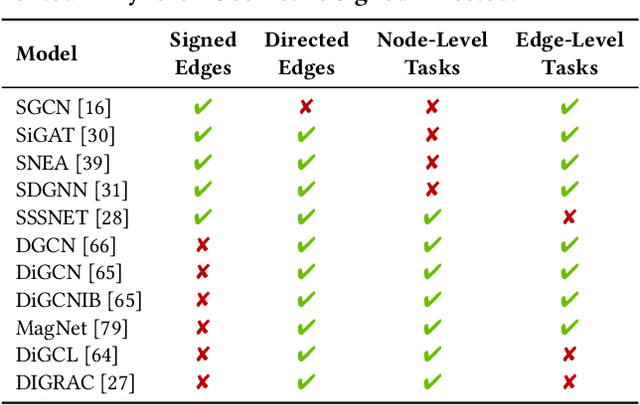
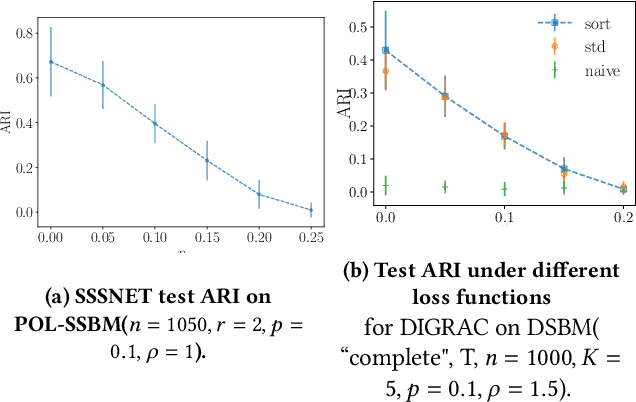
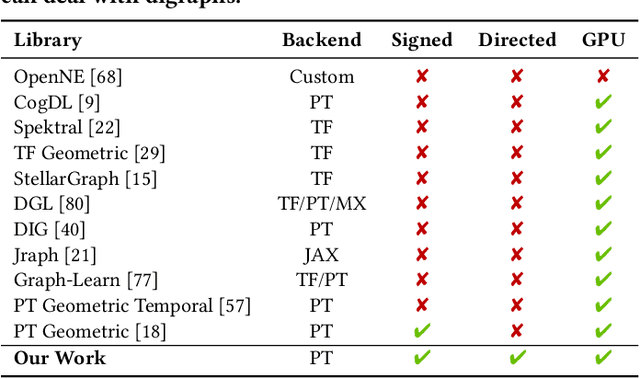
Signed networks are ubiquitous in many real-world applications (e.g., social networks encoding trust/distrust relationships, correlation networks arising from time series data). While many signed networks are directed, there is a lack of survey papers and software packages on graph neural networks (GNNs) specially designed for directed networks. In this paper, we present PyTorch Geometric Signed Directed, a survey and software on GNNs for signed and directed networks. We review typical tasks, loss functions and evaluation metrics in the analysis of signed and directed networks, discuss data used in related experiments, and provide an overview of methods proposed. The deep learning framework consists of easy-to-use GNN models, synthetic and real-world data, as well as task-specific evaluation metrics and loss functions for signed and directed networks. The software is presented in a modular fashion, so that signed and directed networks can also be treated separately. As an extension library for PyTorch Geometric, our proposed software is maintained with open-source releases, detailed documentation, continuous integration, unit tests and code coverage checks. Our code is publicly available at \url{https://github.com/SherylHYX/pytorch_geometric_signed_directed}.
Machine Learning for Real-Time, Automatic, and Early Diagnosis of Parkinson's Disease by Extracting Signs of Micrographia from Handwriting Images
Nov 24, 2021
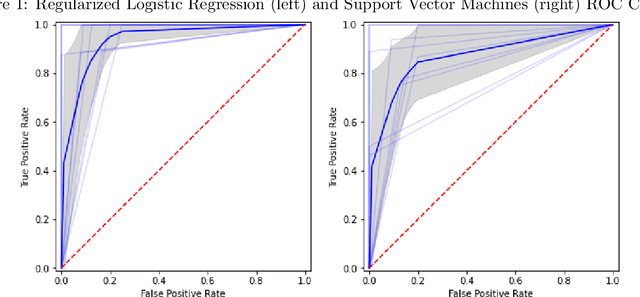

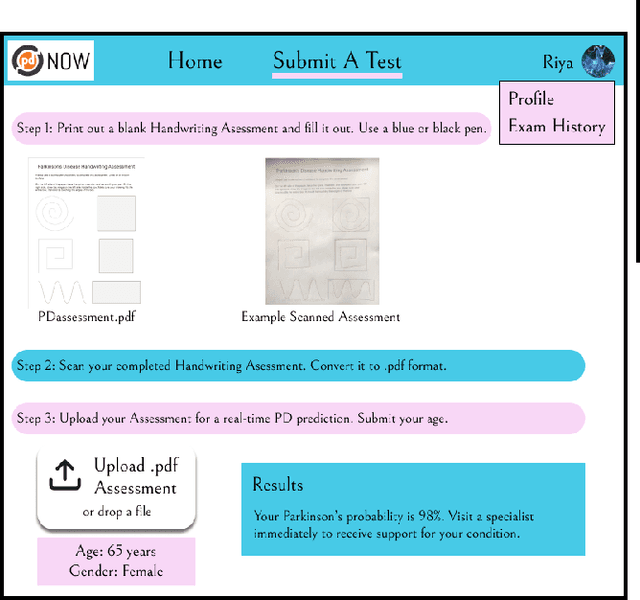
Parkinson's disease (PD) is debilitating, progressive, and clinically marked by motor symptoms. As the second most common neurodegenerative disease in the world, it affects over 10 million lives globally. Existing diagnoses methods have limitations, such as the expense of visiting doctors and the challenge of automated early detection, considering that behavioral differences in patients and healthy individuals are often indistinguishable in the early stages. However, micrographia, a handwriting disorder that leads to abnormally small handwriting, tremors, dystonia, and slow movement in the hands and fingers, is commonly observed in the early stages of PD. In this work, we apply machine learning techniques to extract signs of micrographia from drawing samples gathered from two open-source datasets and achieve a predictive accuracy of 94%. This work also sets the foundations for a publicly available and user-friendly web portal that anyone with access to a pen, printer, and phone can use for early PD detection.
Online V2X Scheduling for Raw-Level Cooperative Perception
Feb 12, 2022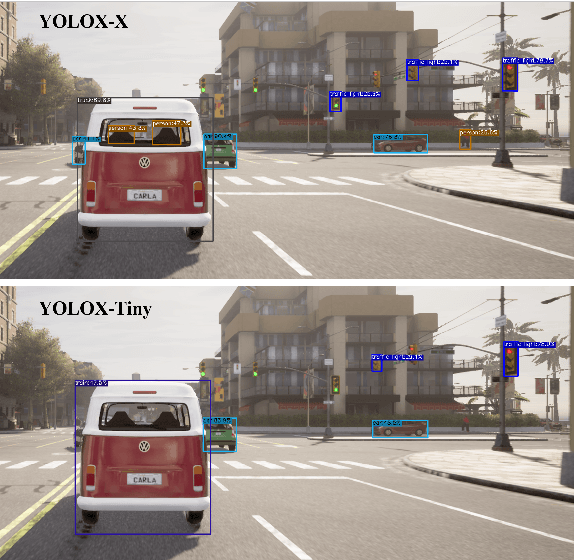
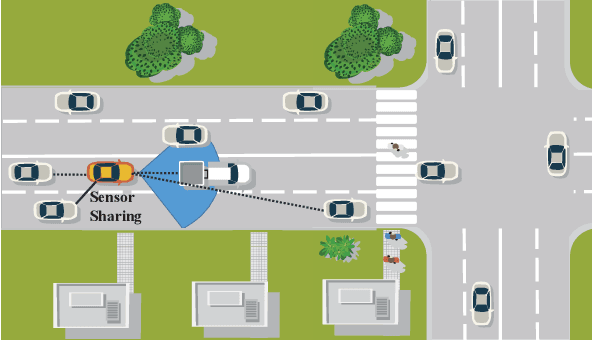
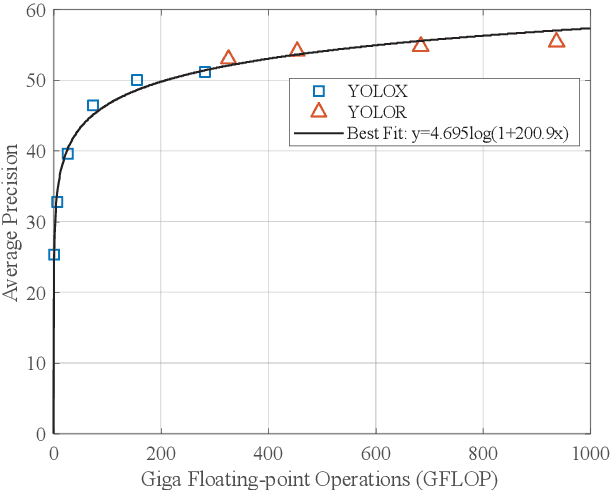
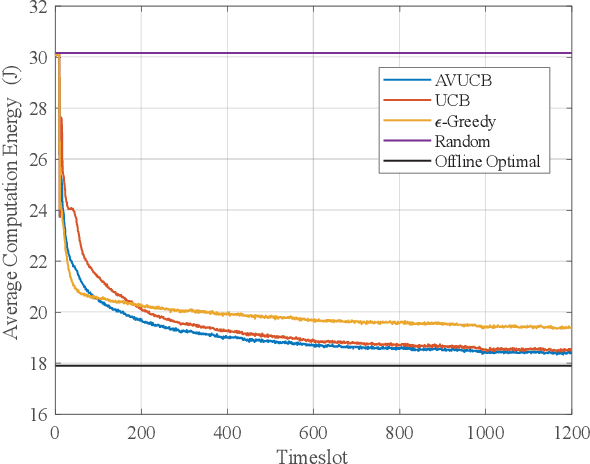
Cooperative perception of connected vehicles comes to the rescue when the field of view restricts stand-alone intelligence. While raw-level cooperative perception preserves most information to guarantee accuracy, it is demanding in communication bandwidth and computation power. Therefore, it is important to schedule the most beneficial vehicle to share its sensor in terms of supplementary view and stable network connection. In this paper, we present a model of raw-level cooperative perception and formulate the energy minimization problem of sensor sharing scheduling as a variant of the Multi-Armed Bandit (MAB) problem. Specifically, volatility of the neighboring vehicles, heterogeneity of V2X channels, and the time-varying traffic context are taken into consideration. Then we propose an online learning-based algorithm with logarithmic performance loss, achieving a decent trade-off between exploration and exploitation. Simulation results under different scenarios indicate that the proposed algorithm quickly learns to schedule the optimal cooperative vehicle and saves more energy as compared to baseline algorithms.
Escaping Saddle Points with Bias-Variance Reduced Local Perturbed SGD for Communication Efficient Nonconvex Distributed Learning
Feb 12, 2022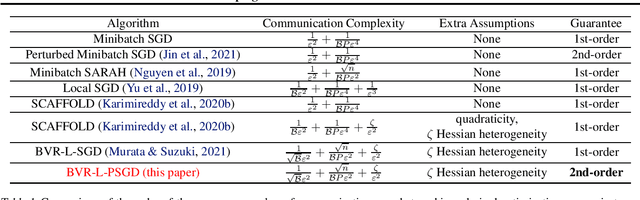
In recent centralized nonconvex distributed learning and federated learning, local methods are one of the promising approaches to reduce communication time. However, existing work has mainly focused on studying first-order optimality guarantees. On the other side, second-order optimality guaranteed algorithms have been extensively studied in the non-distributed optimization literature. In this paper, we study a new local algorithm called Bias-Variance Reduced Local Perturbed SGD (BVR-L-PSGD), that combines the existing bias-variance reduced gradient estimator with parameter perturbation to find second-order optimal points in centralized nonconvex distributed optimization. BVR-L-PSGD enjoys second-order optimality with nearly the same communication complexity as the best known one of BVR-L-SGD to find first-order optimality. Particularly, the communication complexity is better than non-local methods when the local datasets heterogeneity is smaller than the smoothness of the local loss. In an extreme case, the communication complexity approaches to $\widetilde \Theta(1)$ when the local datasets heterogeneity goes to zero.
Certifiable Robustness for Nearest Neighbor Classifiers
Jan 13, 2022

ML models are typically trained using large datasets of high quality. However, training datasets often contain inconsistent or incomplete data. To tackle this issue, one solution is to develop algorithms that can check whether a prediction of a model is certifiably robust. Given a learning algorithm that produces a classifier and given an example at test time, a classification outcome is certifiably robust if it is predicted by every model trained across all possible worlds (repairs) of the uncertain (inconsistent) dataset. This notion of robustness falls naturally under the framework of certain answers. In this paper, we study the complexity of certifying robustness for a simple but widely deployed classification algorithm, $k$-Nearest Neighbors ($k$-NN). Our main focus is on inconsistent datasets when the integrity constraints are functional dependencies (FDs). For this setting, we establish a dichotomy in the complexity of certifying robustness w.r.t. the set of FDs: the problem either admits a polynomial time algorithm, or it is coNP-hard. Additionally, we exhibit a similar dichotomy for the counting version of the problem, where the goal is to count the number of possible worlds that predict a certain label. As a byproduct of our study, we also establish the complexity of a problem related to finding an optimal subset repair that may be of independent interest.