 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Fast Private Kernel Density Estimation via Locality Sensitive Quantization
Jul 04, 2023
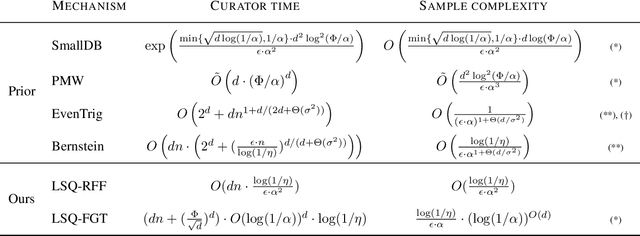
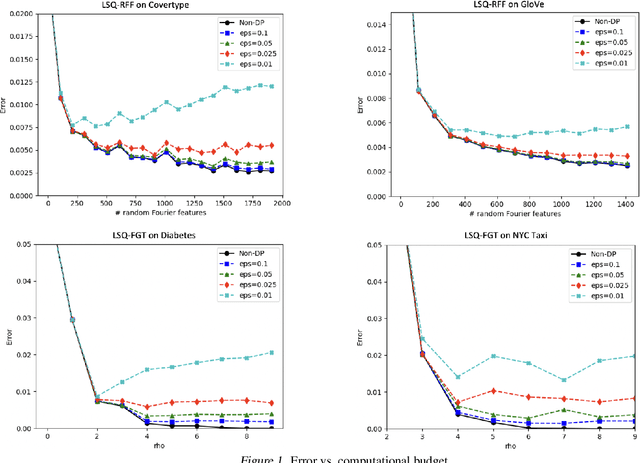
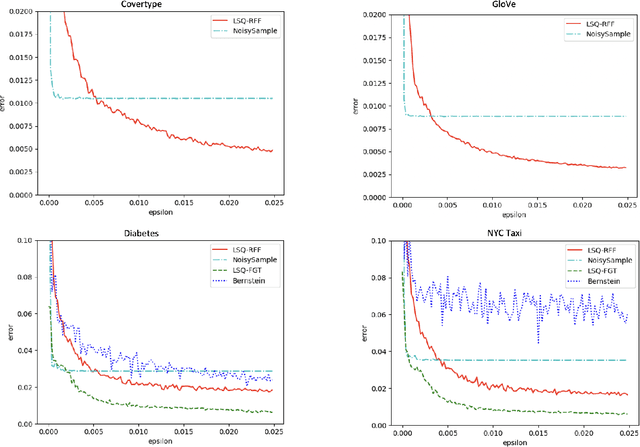
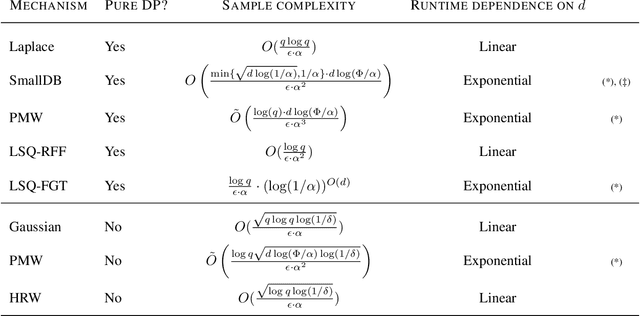
We study efficient mechanisms for differentially private kernel density estimation (DP-KDE). Prior work for the Gaussian kernel described algorithms that run in time exponential in the number of dimensions $d$. This paper breaks the exponential barrier, and shows how the KDE can privately be approximated in time linear in $d$, making it feasible for high-dimensional data. We also present improved bounds for low-dimensional data. Our results are obtained through a general framework, which we term Locality Sensitive Quantization (LSQ), for constructing private KDE mechanisms where existing KDE approximation techniques can be applied. It lets us leverage several efficient non-private KDE methods -- like Random Fourier Features, the Fast Gauss Transform, and Locality Sensitive Hashing -- and ``privatize'' them in a black-box manner. Our experiments demonstrate that our resulting DP-KDE mechanisms are fast and accurate on large datasets in both high and low dimensions.
Neuromorphic Optical Flow and Real-time Implementation with Event Cameras
Apr 14, 2023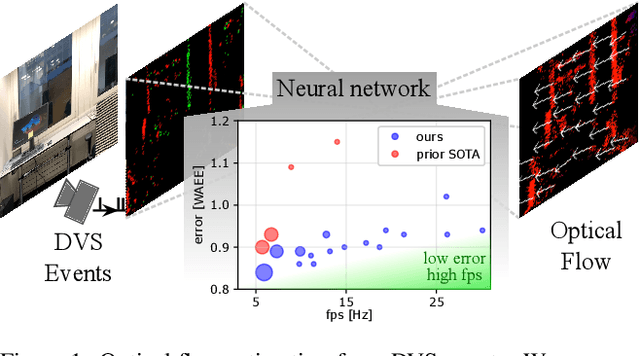
Optical flow provides information on relative motion that is an important component in many computer vision pipelines. Neural networks provide high accuracy optical flow, yet their complexity is often prohibitive for application at the edge or in robots, where efficiency and latency play crucial role. To address this challenge, we build on the latest developments in event-based vision and spiking neural networks. We propose a new network architecture, inspired by Timelens, that improves the state-of-the-art self-supervised optical flow accuracy when operated both in spiking and non-spiking mode. To implement a real-time pipeline with a physical event camera, we propose a methodology for principled model simplification based on activity and latency analysis. We demonstrate high speed optical flow prediction with almost two orders of magnitude reduced complexity while maintaining the accuracy, opening the path for real-time deployments.
Conformal Prediction for Time Series with Modern Hopfield Networks
Mar 22, 2023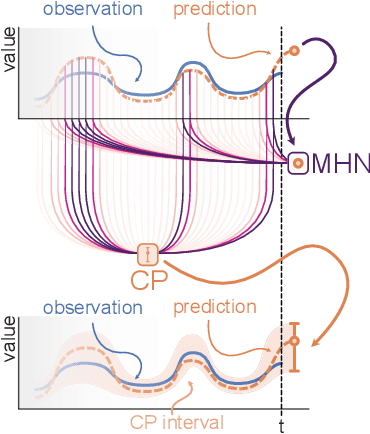
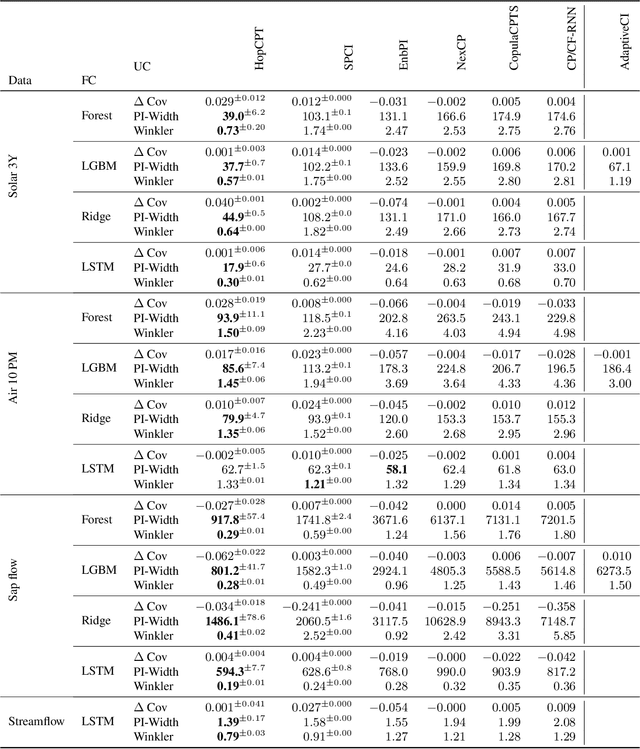
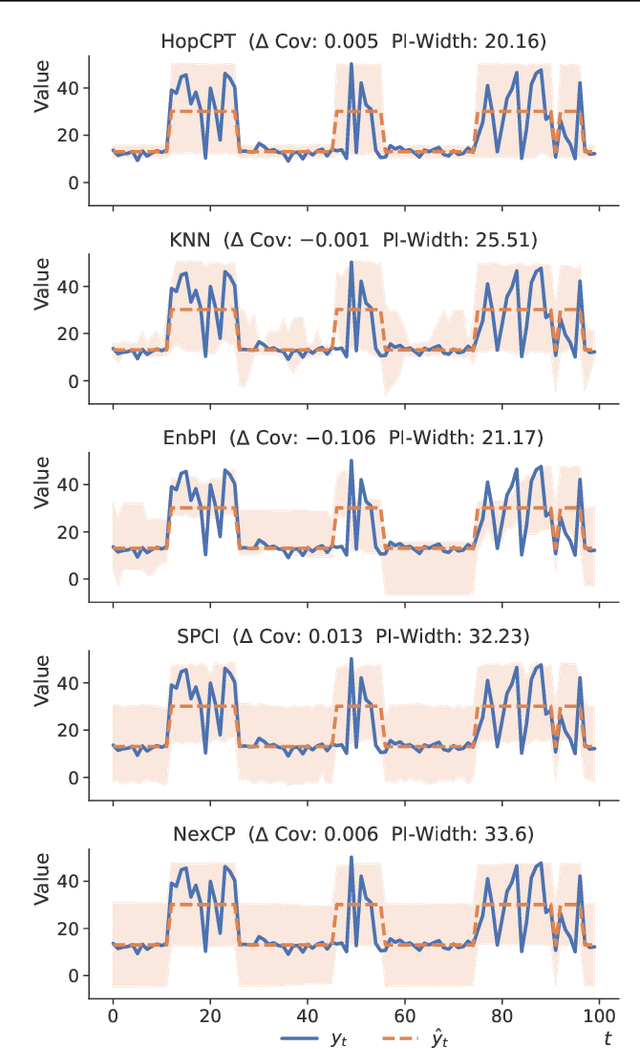
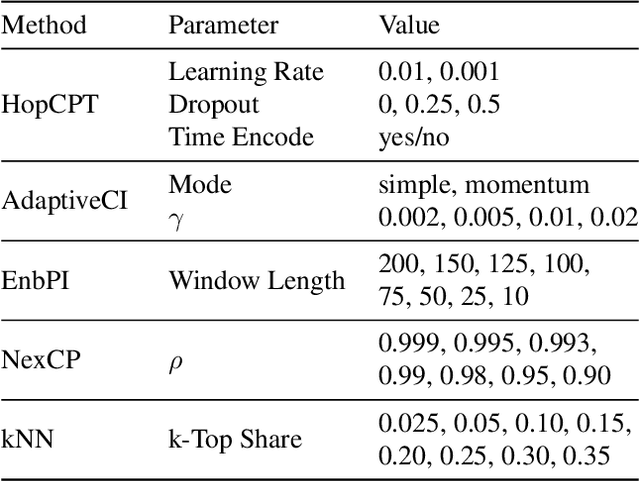
To quantify uncertainty, conformal prediction methods are gaining continuously more interest and have already been successfully applied to various domains. However, they are difficult to apply to time series as the autocorrelative structure of time series violates basic assumptions required by conformal prediction. We propose HopCPT, a novel conformal prediction approach for time series that not only copes with temporal structures but leverages them. We show that our approach is theoretically well justified for time series where temporal dependencies are present. In experiments, we demonstrate that our new approach outperforms state-of-the-art conformal prediction methods on multiple real-world time series datasets from four different domains.
A 137.5 TOPS/W SRAM Compute-in-Memory Macro with 9-b Memory Cell-Embedded ADCs and Signal Margin Enhancement Techniques for AI Edge Applications
Jul 12, 2023
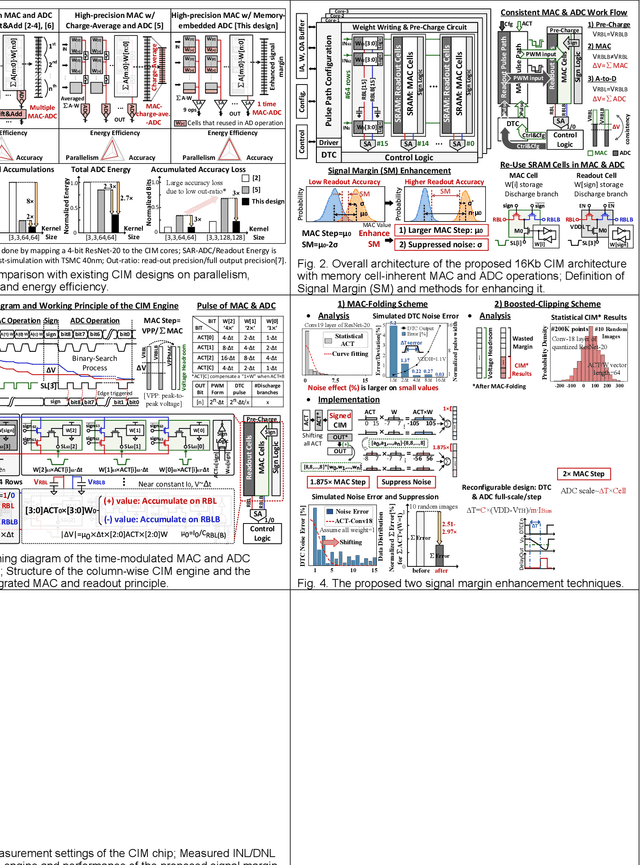
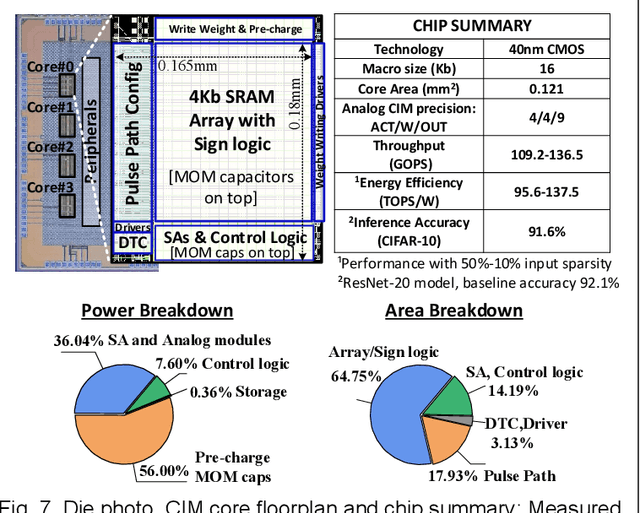
In this paper, we propose a high-precision SRAM-based CIM macro that can perform 4x4-bit MAC operations and yield 9-bit signed output. The inherent discharge branches of SRAM cells are utilized to apply time-modulated MAC and 9-bit ADC readout operations on two bit-line capacitors. The same principle is used for both MAC and A-to-D conversion ensuring high linearity and thus supporting large number of analog MAC accumulations. The memory cell-embedded ADC eliminates the use of separate ADCs and enhances energy and area efficiency. Additionally, two signal margin enhancement techniques, namely the MAC-folding and boosted-clipping schemes, are proposed to further improve the CIM computation accuracy.
Maximizing Seaweed Growth on Autonomous Farms: A Dynamic Programming Approach for Underactuated Systems Navigating on Uncertain Ocean Currents
Jul 04, 2023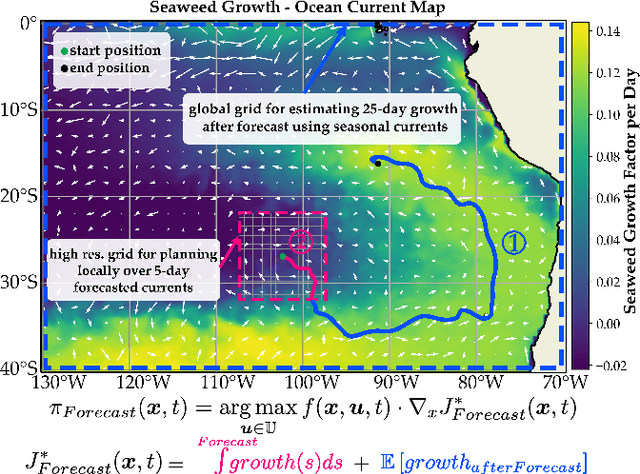
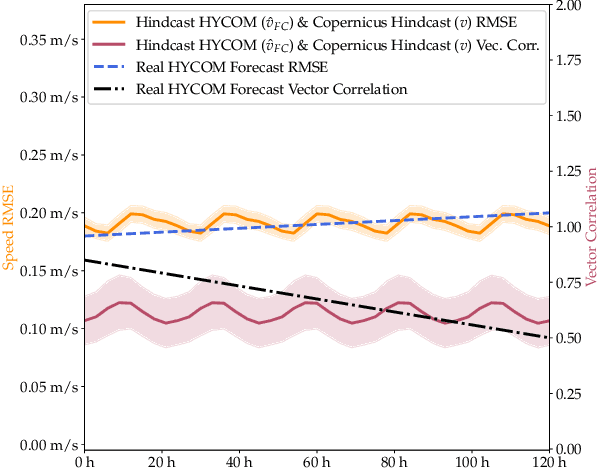
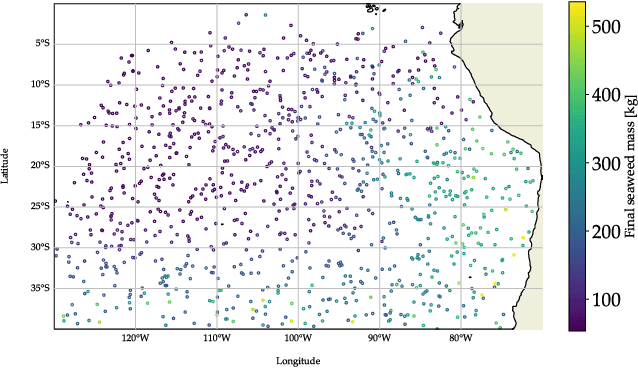
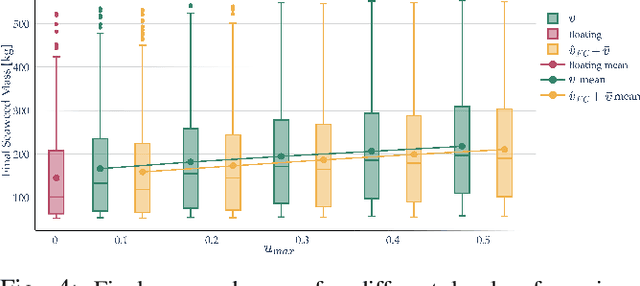
Seaweed biomass offers significant potential for climate mitigation, but large-scale, autonomous open-ocean farms are required to fully exploit it. Such farms typically have low propulsion and are heavily influenced by ocean currents. We want to design a controller that maximizes seaweed growth over months by taking advantage of the non-linear time-varying ocean currents for reaching high-growth regions. The complex dynamics and underactuation make this challenging even when the currents are known. This is even harder when only short-term imperfect forecasts with increasing uncertainty are available. We propose a dynamic programming-based method to efficiently solve for the optimal growth value function when true currents are known. We additionally present three extensions when as in reality only forecasts are known: (1) our methods resulting value function can be used as feedback policy to obtain the growth-optimal control for all states and times, allowing closed-loop control equivalent to re-planning at every time step hence mitigating forecast errors, (2) a feedback policy for long-term optimal growth beyond forecast horizons using seasonal average current data as terminal reward, and (3) a discounted finite-time Dynamic Programming (DP) formulation to account for increasing ocean current estimate uncertainty. We evaluate our approach through 30-day simulations of floating seaweed farms in realistic Pacific Ocean current scenarios. Our method demonstrates an achievement of 95.8% of the best possible growth using only 5-day forecasts. This confirms the feasibility of using low-power propulsion and optimal control for enhanced seaweed growth on floating farms under real-world conditions.
A Comprehensive Survey on Test-Time Adaptation under Distribution Shifts
Mar 27, 2023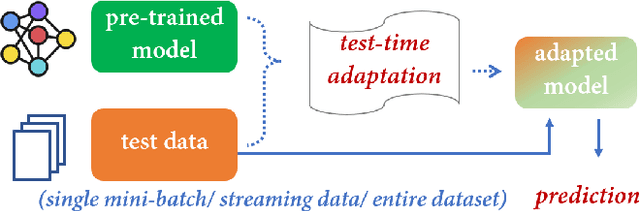

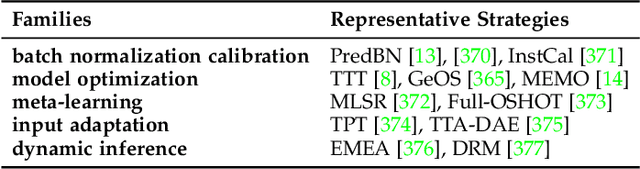
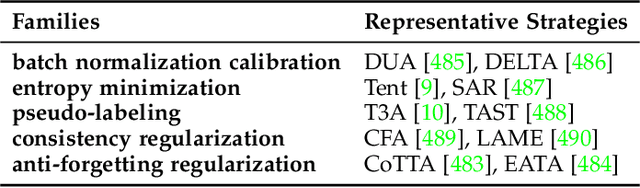
Machine learning methods strive to acquire a robust model during training that can generalize well to test samples, even under distribution shifts. However, these methods often suffer from a performance drop due to unknown test distributions. Test-time adaptation (TTA), an emerging paradigm, has the potential to adapt a pre-trained model to unlabeled data during testing, before making predictions. Recent progress in this paradigm highlights the significant benefits of utilizing unlabeled data for training self-adapted models prior to inference. In this survey, we divide TTA into several distinct categories, namely, test-time (source-free) domain adaptation, test-time batch adaptation, online test-time adaptation, and test-time prior adaptation. For each category, we provide a comprehensive taxonomy of advanced algorithms, followed by a discussion of different learning scenarios. Furthermore, we analyze relevant applications of TTA and discuss open challenges and promising areas for future research. A comprehensive list of TTA methods can be found at \url{https://github.com/tim-learn/awesome-test-time-adaptation}.
Zero-touch realization of Pervasive Artificial Intelligence-as-a-service in 6G networks
Jul 21, 2023The vision of the upcoming 6G technologies, characterized by ultra-dense network, low latency, and fast data rate is to support Pervasive AI (PAI) using zero-touch solutions enabling self-X (e.g., self-configuration, self-monitoring, and self-healing) services. However, the research on 6G is still in its infancy, and only the first steps have been taken to conceptualize its design, investigate its implementation, and plan for use cases. Toward this end, academia and industry communities have gradually shifted from theoretical studies of AI distribution to real-world deployment and standardization. Still, designing an end-to-end framework that systematizes the AI distribution by allowing easier access to the service using a third-party application assisted by a zero-touch service provisioning has not been well explored. In this context, we introduce a novel platform architecture to deploy a zero-touch PAI-as-a-Service (PAIaaS) in 6G networks supported by a blockchain-based smart system. This platform aims to standardize the pervasive AI at all levels of the architecture and unify the interfaces in order to facilitate the service deployment across application and infrastructure domains, relieve the users worries about cost, security, and resource allocation, and at the same time, respect the 6G stringent performance requirements. As a proof of concept, we present a Federated Learning-as-a-service use case where we evaluate the ability of our proposed system to self-optimize and self-adapt to the dynamics of 6G networks in addition to minimizing the users' perceived costs.
* IEEE Communications Magazine
EV-Planner: Energy-Efficient Robot Navigation via Event-Based Physics-Guided Neuromorphic Planner
Jul 21, 2023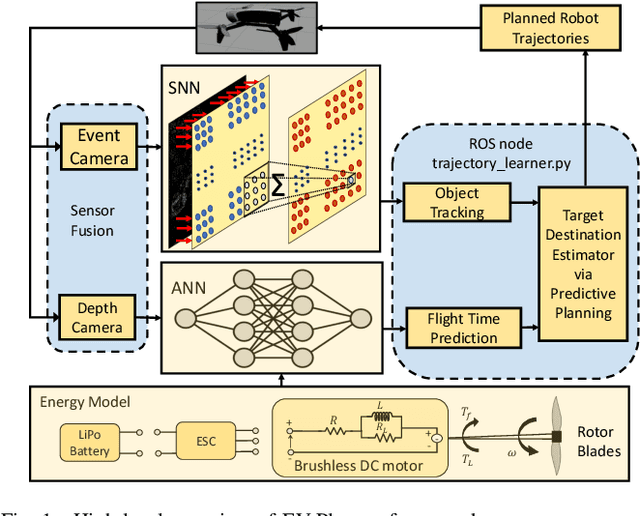
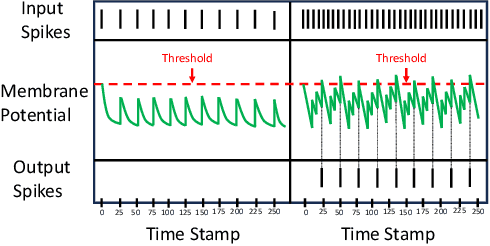
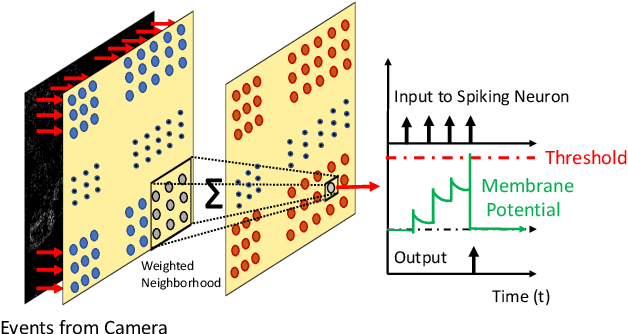
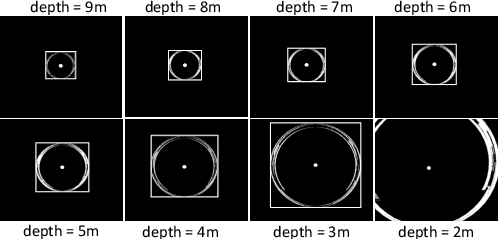
Vision-based object tracking is an essential precursor to performing autonomous aerial navigation in order to avoid obstacles. Biologically inspired neuromorphic event cameras are emerging as a powerful alternative to frame-based cameras, due to their ability to asynchronously detect varying intensities (even in poor lighting conditions), high dynamic range, and robustness to motion blur. Spiking neural networks (SNNs) have gained traction for processing events asynchronously in an energy-efficient manner. On the other hand, physics-based artificial intelligence (AI) has gained prominence recently, as they enable embedding system knowledge via physical modeling inside traditional analog neural networks (ANNs). In this letter, we present an event-based physics-guided neuromorphic planner (EV-Planner) to perform obstacle avoidance using neuromorphic event cameras and physics-based AI. We consider the task of autonomous drone navigation where the mission is to detect moving gates and fly through them while avoiding a collision. We use event cameras to perform object detection using a shallow spiking neural network in an unsupervised fashion. Utilizing the physical equations of the brushless DC motors present in the drone rotors, we train a lightweight energy-aware physics-guided neural network with depth inputs. This predicts the optimal flight time responsible for generating near-minimum energy paths. We spawn the drone in the Gazebo simulator and implement a sensor-fused vision-to-planning neuro-symbolic framework using Robot Operating System (ROS). Simulation results for safe collision-free flight trajectories are presented with performance analysis and potential future research directions
Rigorous Runtime Analysis of Diversity Optimization with GSEMO on OneMinMax
Jul 14, 2023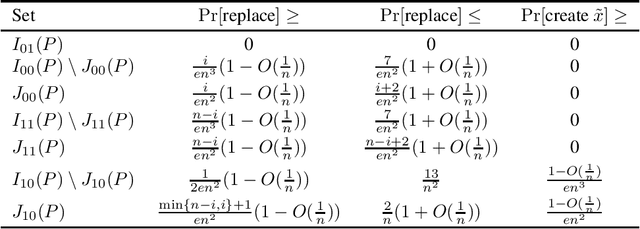
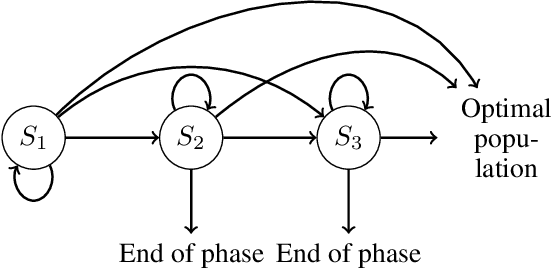
The evolutionary diversity optimization aims at finding a diverse set of solutions which satisfy some constraint on their fitness. In the context of multi-objective optimization this constraint can require solutions to be Pareto-optimal. In this paper we study how the GSEMO algorithm with additional diversity-enhancing heuristic optimizes a diversity of its population on a bi-objective benchmark problem OneMinMax, for which all solutions are Pareto-optimal. We provide a rigorous runtime analysis of the last step of the optimization, when the algorithm starts with a population with a second-best diversity, and prove that it finds a population with optimal diversity in expected time $O(n^2)$, when the problem size $n$ is odd. For reaching our goal, we analyse the random walk of the population, which reflects the frequency of changes in the population and their outcomes.
Linking vision and motion for self-supervised object-centric perception
Jul 14, 2023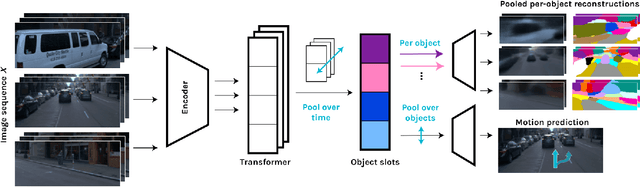
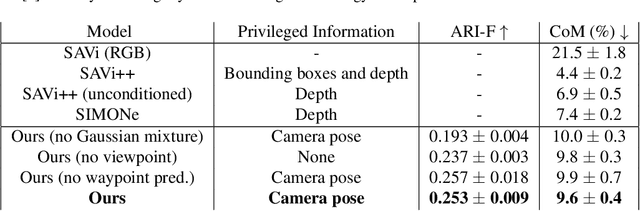
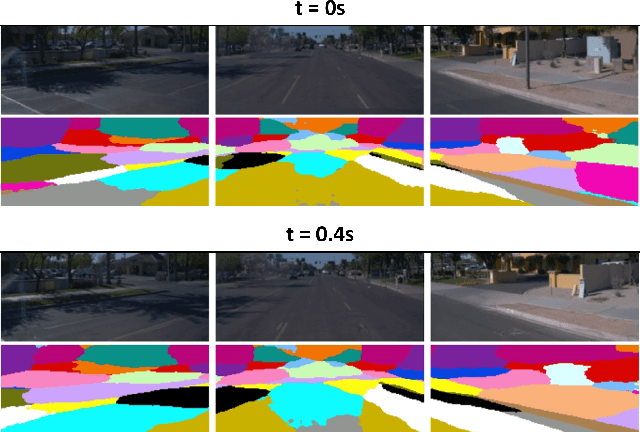

Object-centric representations enable autonomous driving algorithms to reason about interactions between many independent agents and scene features. Traditionally these representations have been obtained via supervised learning, but this decouples perception from the downstream driving task and could harm generalization. In this work we adapt a self-supervised object-centric vision model to perform object decomposition using only RGB video and the pose of the vehicle as inputs. We demonstrate that our method obtains promising results on the Waymo Open perception dataset. While object mask quality lags behind supervised methods or alternatives that use more privileged information, we find that our model is capable of learning a representation that fuses multiple camera viewpoints over time and successfully tracks many vehicles and pedestrians in the dataset. Code for our model is available at https://github.com/wayveai/SOCS.