 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLLaDA-Rec: Discrete Diffusion for Parallel Semantic ID Generation in Generative Recommendation
Nov 09, 2025Generative recommendation represents each item as a semantic ID, i.e., a sequence of discrete tokens, and generates the next item through autoregressive decoding. While effective, existing autoregressive models face two intrinsic limitations: (1) unidirectional constraints, where causal attention restricts each token to attend only to its predecessors, hindering global semantic modeling; and (2) error accumulation, where the fixed left-to-right generation order causes prediction errors in early tokens to propagate to the predictions of subsequent token. To address these issues, we propose LLaDA-Rec, a discrete diffusion framework that reformulates recommendation as parallel semantic ID generation. By combining bidirectional attention with the adaptive generation order, the approach models inter-item and intra-item dependencies more effectively and alleviates error accumulation. Specifically, our approach comprises three key designs: (1) a parallel tokenization scheme that produces semantic IDs for bidirectional modeling, addressing the mismatch between residual quantization and bidirectional architectures; (2) two masking mechanisms at the user-history and next-item levels to capture both inter-item sequential dependencies and intra-item semantic relationships; and (3) an adapted beam search strategy for adaptive-order discrete diffusion decoding, resolving the incompatibility of standard beam search with diffusion-based generation. Experiments on three real-world datasets show that LLaDA-Rec consistently outperforms both ID-based and state-of-the-art generative recommenders, establishing discrete diffusion as a new paradigm for generative recommendation.
Defending Deepfake via Texture Feature Perturbation
Aug 24, 2025



The rapid development of Deepfake technology poses severe challenges to social trust and information security. While most existing detection methods primarily rely on passive analyses, due to unresolvable high-quality Deepfake contents, proactive defense has recently emerged by inserting invisible signals in advance of image editing. In this paper, we introduce a proactive Deepfake detection approach based on facial texture features. Since human eyes are more sensitive to perturbations in smooth regions, we invisibly insert perturbations within texture regions that have low perceptual saliency, applying localized perturbations to key texture regions while minimizing unwanted noise in non-textured areas. Our texture-guided perturbation framework first extracts preliminary texture features via Local Binary Patterns (LBP), and then introduces a dual-model attention strategy to generate and optimize texture perturbations. Experiments on CelebA-HQ and LFW datasets demonstrate the promising performance of our method in distorting Deepfake generation and producing obvious visual defects under multiple attack models, providing an efficient and scalable solution for proactive Deepfake detection.
A biological vision inspired framework for machine perception of abutting grating illusory contours
Aug 24, 2025Higher levels of machine intelligence demand alignment with human perception and cognition. Deep neural networks (DNN) dominated machine intelligence have demonstrated exceptional performance across various real-world tasks. Nevertheless, recent evidence suggests that DNNs fail to perceive illusory contours like the abutting grating, a discrepancy that misaligns with human perception patterns. Departing from previous works, we propose a novel deep network called illusory contour perception network (ICPNet) inspired by the circuits of the visual cortex. In ICPNet, a multi-scale feature projection (MFP) module is designed to extract multi-scale representations. To boost the interaction between feedforward and feedback features, a feature interaction attention module (FIAM) is introduced. Moreover, drawing inspiration from the shape bias observed in human perception, an edge detection task conducted via the edge fusion module (EFM) injects shape constraints that guide the network to concentrate on the foreground. We assess our method on the existing AG-MNIST test set and the AG-Fashion-MNIST test sets constructed by this work. Comprehensive experimental results reveal that ICPNet is significantly more sensitive to abutting grating illusory contours than state-of-the-art models, with notable improvements in top-1 accuracy across various subsets. This work is expected to make a step towards human-level intelligence for DNN-based models.
KuaiLive: A Real-time Interactive Dataset for Live Streaming Recommendation
Aug 07, 2025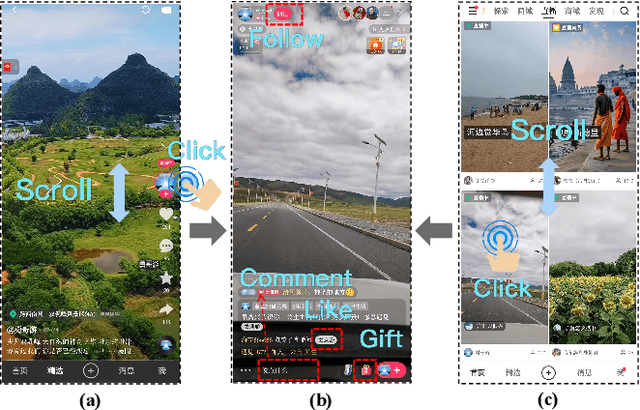



Live streaming platforms have become a dominant form of online content consumption, offering dynamically evolving content, real-time interactions, and highly engaging user experiences. These unique characteristics introduce new challenges that differentiate live streaming recommendation from traditional recommendation settings and have garnered increasing attention from industry in recent years. However, research progress in academia has been hindered by the lack of publicly available datasets that accurately reflect the dynamic nature of live streaming environments. To address this gap, we introduce KuaiLive, the first real-time, interactive dataset collected from Kuaishou, a leading live streaming platform in China with over 400 million daily active users. The dataset records the interaction logs of 23,772 users and 452,621 streamers over a 21-day period. Compared to existing datasets, KuaiLive offers several advantages: it includes precise live room start and end timestamps, multiple types of real-time user interactions (click, comment, like, gift), and rich side information features for both users and streamers. These features enable more realistic simulation of dynamic candidate items and better modeling of user and streamer behaviors. We conduct a thorough analysis of KuaiLive from multiple perspectives and evaluate several representative recommendation methods on it, establishing a strong benchmark for future research. KuaiLive can support a wide range of tasks in the live streaming domain, such as top-K recommendation, click-through rate prediction, watch time prediction, and gift price prediction. Moreover, its fine-grained behavioral data also enables research on multi-behavior modeling, multi-task learning, and fairness-aware recommendation. The dataset and related resources are publicly available at https://imgkkk574.github.io/KuaiLive.
Benefit from Rich: Tackling Search Interaction Sparsity in Search Enhanced Recommendation
Aug 06, 2025In modern online platforms, search and recommendation (S&R) often coexist, offering opportunities for performance improvement through search-enhanced approaches. Existing studies show that incorporating search signals boosts recommendation performance. However, the effectiveness of these methods relies heavily on rich search interactions. They primarily benefit a small subset of users with abundant search behavior, while offering limited improvements for the majority of users who exhibit only sparse search activity. To address the problem of sparse search data in search-enhanced recommendation, we face two key challenges: (1) how to learn useful search features for users with sparse search interactions, and (2) how to design effective training objectives under sparse conditions. Our idea is to leverage the features of users with rich search interactions to enhance those of users with sparse search interactions. Based on this idea, we propose GSERec, a method that utilizes message passing on the User-Code Graphs to alleviate data sparsity in Search-Enhanced Recommendation. Specifically, we utilize Large Language Models (LLMs) with vector quantization to generate discrete codes, which connect similar users and thereby construct the graph. Through message passing on this graph, embeddings of users with rich search data are propagated to enhance the embeddings of users with sparse interactions. To further ensure that the message passing captures meaningful information from truly similar users, we introduce a contrastive loss to better model user similarities. The enhanced user representations are then integrated into downstream search-enhanced recommendation models. Experiments on three real-world datasets show that GSERec consistently outperforms baselines, especially for users with sparse search behaviors.
Bridging Search and Recommendation through Latent Cross Reasoning
Aug 06, 2025Search and recommendation (S&R) are fundamental components of modern online platforms, yet effectively leveraging search behaviors to improve recommendation remains a challenging problem. User search histories often contain noisy or irrelevant signals that can even degrade recommendation performance, while existing approaches typically encode S&R histories either jointly or separately without explicitly identifying which search behaviors are truly useful. Inspired by the human decision-making process, where one first identifies recommendation intent and then reasons about relevant evidence, we design a latent cross reasoning framework that first encodes user S&R histories to capture global interests and then iteratively reasons over search behaviors to extract signals beneficial for recommendation. Contrastive learning is employed to align latent reasoning states with target items, and reinforcement learning is further introduced to directly optimize ranking performance. Extensive experiments on public benchmarks demonstrate consistent improvements over strong baselines, validating the importance of reasoning in enhancing search-aware recommendation.
StyliTruth : Unlocking Stylized yet Truthful LLM Generation via Disentangled Steering
Aug 06, 2025Generating stylized large language model (LLM) responses via representation editing is a promising way for fine-grained output control. However, there exists an inherent trade-off: imposing a distinctive style often degrades truthfulness. Existing representation editing methods, by naively injecting style signals, overlook this collateral impact and frequently contaminate the model's core truthfulness representations, resulting in reduced answer correctness. We term this phenomenon stylization-induced truthfulness collapse. We attribute this issue to latent coupling between style and truth directions in certain key attention heads, and propose StyliTruth, a mechanism that preserves stylization while keeping truthfulness intact. StyliTruth separates the style-relevant and truth-relevant subspaces in the model's representation space via an orthogonal deflation process. This decomposition enables independent control of style and truth in their own subspaces, minimizing interference. By designing adaptive, token-level steering vectors within each subspace, we dynamically and precisely control the generation process to maintain both stylistic fidelity and truthfulness. We validate our method on multiple styles and languages. Extensive experiments and analyses show that StyliTruth significantly reduces stylization-induced truthfulness collapse and outperforms existing inference-time intervention methods in balancing style adherence with truthfulness.
Is neural semantic parsing good at ellipsis resolution, or isn't it?
Jul 31, 2025Neural semantic parsers have shown good overall performance for a variety of linguistic phenomena, reaching semantic matching scores of more than 90%. But how do such parsers perform on strongly context-sensitive phenomena, where large pieces of semantic information need to be duplicated to form a meaningful semantic representation? A case in point is English verb phrase ellipsis, a construct where entire verb phrases can be abbreviated by a single auxiliary verb. Are the otherwise known as powerful semantic parsers able to deal with ellipsis or aren't they? We constructed a corpus of 120 cases of ellipsis with their fully resolved meaning representation and used this as a challenge set for a large battery of neural semantic parsers. Although these parsers performed very well on the standard test set, they failed in the instances with ellipsis. Data augmentation
H2Tune: Federated Foundation Model Fine-Tuning with Hybrid Heterogeneity
Jul 30, 2025Different from existing federated fine-tuning (FFT) methods for foundation models, hybrid heterogeneous federated fine-tuning (HHFFT) is an under-explored scenario where clients exhibit double heterogeneity in model architectures and downstream tasks. This hybrid heterogeneity introduces two significant challenges: 1) heterogeneous matrix aggregation, where clients adopt different large-scale foundation models based on their task requirements and resource limitations, leading to dimensional mismatches during LoRA parameter aggregation; and 2) multi-task knowledge interference, where local shared parameters, trained with both task-shared and task-specific knowledge, cannot ensure only task-shared knowledge is transferred between clients. To address these challenges, we propose H2Tune, a federated foundation model fine-tuning with hybrid heterogeneity. Our framework H2Tune consists of three key components: (i) sparsified triple matrix decomposition to align hidden dimensions across clients through constructing rank-consistent middle matrices, with adaptive sparsification based on client resources; (ii) relation-guided matrix layer alignment to handle heterogeneous layer structures and representation capabilities; and (iii) alternating task-knowledge disentanglement mechanism to decouple shared and specific knowledge of local model parameters through alternating optimization. Theoretical analysis proves a convergence rate of O(1/\sqrt{T}). Extensive experiments show our method achieves up to 15.4% accuracy improvement compared to state-of-the-art baselines. Our code is available at https://anonymous.4open.science/r/H2Tune-1407.
Proto-EVFL: Enhanced Vertical Federated Learning via Dual Prototype with Extremely Unaligned Data
Jul 30, 2025In vertical federated learning (VFL), multiple enterprises address aligned sample scarcity by leveraging massive locally unaligned samples to facilitate collaborative learning. However, unaligned samples across different parties in VFL can be extremely class-imbalanced, leading to insufficient feature representation and limited model prediction space. Specifically, class-imbalanced problems consist of intra-party class imbalance and inter-party class imbalance, which can further cause local model bias and feature contribution inconsistency issues, respectively. To address the above challenges, we propose Proto-EVFL, an enhanced VFL framework via dual prototypes. We first introduce class prototypes for each party to learn relationships between classes in the latent space, allowing the active party to predict unseen classes. We further design a probabilistic dual prototype learning scheme to dynamically select unaligned samples by conditional optimal transport cost with class prior probability. Moreover, a mixed prior guided module guides this selection process by combining local and global class prior probabilities. Finally, we adopt an \textit{adaptive gated feature aggregation strategy} to mitigate feature contribution inconsistency by dynamically weighting and aggregating local features across different parties. We proved that Proto-EVFL, as the first bi-level optimization framework in VFL, has a convergence rate of 1/\sqrt T. Extensive experiments on various datasets validate the superiority of our Proto-EVFL. Even in a zero-shot scenario with one unseen class, it outperforms baselines by at least 6.97%