 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQwen3-ASR Technical Report
Jan 29, 2026In this report, we introduce Qwen3-ASR family, which includes two powerful all-in-one speech recognition models and a novel non-autoregressive speech forced alignment model. Qwen3-ASR-1.7B and Qwen3-ASR-0.6B are ASR models that support language identification and ASR for 52 languages and dialects. Both of them leverage large-scale speech training data and the strong audio understanding ability of their foundation model Qwen3-Omni. We conduct comprehensive internal evaluation besides the open-sourced benchmarks as ASR models might differ little on open-sourced benchmark scores but exhibit significant quality differences in real-world scenarios. The experiments reveal that the 1.7B version achieves SOTA performance among open-sourced ASR models and is competitive with the strongest proprietary APIs while the 0.6B version offers the best accuracy-efficiency trade-off. Qwen3-ASR-0.6B can achieve an average TTFT as low as 92ms and transcribe 2000 seconds speech in 1 second at a concurrency of 128. Qwen3-ForcedAligner-0.6B is an LLM based NAR timestamp predictor that is able to align text-speech pairs in 11 languages. Timestamp accuracy experiments show that the proposed model outperforms the three strongest force alignment models and takes more advantages in efficiency and versatility. To further accelerate the community research of ASR and audio understanding, we release these models under the Apache 2.0 license.
Qwen3-TTS Technical Report
Jan 22, 2026In this report, we present the Qwen3-TTS series, a family of advanced multilingual, controllable, robust, and streaming text-to-speech models. Qwen3-TTS supports state-of-the-art 3-second voice cloning and description-based control, allowing both the creation of entirely novel voices and fine-grained manipulation over the output speech. Trained on over 5 million hours of speech data spanning 10 languages, Qwen3-TTS adopts a dual-track LM architecture for real-time synthesis, coupled with two speech tokenizers: 1) Qwen-TTS-Tokenizer-25Hz is a single-codebook codec emphasizing semantic content, which offers seamlessly integration with Qwen-Audio and enables streaming waveform reconstruction via a block-wise DiT. 2) Qwen-TTS-Tokenizer-12Hz achieves extreme bitrate reduction and ultra-low-latency streaming, enabling immediate first-packet emission ($97\,\mathrm{ms}$) through its 12.5 Hz, 16-layer multi-codebook design and a lightweight causal ConvNet. Extensive experiments indicate state-of-the-art performance across diverse objective and subjective benchmark (e.g., TTS multilingual test set, InstructTTSEval, and our long speech test set). To facilitate community research and development, we release both tokenizers and models under the Apache 2.0 license.
Autoregressive long-horizon prediction of plasma edge dynamics
Dec 29, 2025Accurate modeling of scrape-off layer (SOL) and divertor-edge dynamics is vital for designing plasma-facing components in fusion devices. High-fidelity edge fluid/neutral codes such as SOLPS-ITER capture SOL physics with high accuracy, but their computational cost limits broad parameter scans and long transient studies. We present transformer-based, autoregressive surrogates for efficient prediction of 2D, time-dependent plasma edge state fields. Trained on SOLPS-ITER spatiotemporal data, the surrogates forecast electron temperature, electron density, and radiated power over extended horizons. We evaluate model variants trained with increasing autoregressive horizons (1-100 steps) on short- and long-horizon prediction tasks. Longer-horizon training systematically improves rollout stability and mitigates error accumulation, enabling stable predictions over hundreds to thousands of steps and reproducing key dynamical features such as the motion of high-radiation regions. Measured end-to-end wall-clock times show the surrogate is orders of magnitude faster than SOLPS-ITER, enabling rapid parameter exploration. Prediction accuracy degrades when the surrogate enters physical regimes not represented in the training dataset, motivating future work on data enrichment and physics-informed constraints. Overall, this approach provides a fast, accurate surrogate for computationally intensive plasma edge simulations, supporting rapid scenario exploration, control-oriented studies, and progress toward real-time applications in fusion devices.
Qwen3Guard Technical Report
Oct 16, 2025As large language models (LLMs) become more capable and widely used, ensuring the safety of their outputs is increasingly critical. Existing guardrail models, though useful in static evaluation settings, face two major limitations in real-world applications: (1) they typically output only binary "safe/unsafe" labels, which can be interpreted inconsistently across diverse safety policies, rendering them incapable of accommodating varying safety tolerances across domains; and (2) they require complete model outputs before performing safety checks, making them fundamentally incompatible with streaming LLM inference, thereby preventing timely intervention during generation and increasing exposure to harmful partial outputs. To address these challenges, we present Qwen3Guard, a series of multilingual safety guardrail models with two specialized variants: Generative Qwen3Guard, which casts safety classification as an instruction-following task to enable fine-grained tri-class judgments (safe, controversial, unsafe); and Stream Qwen3Guard, which introduces a token-level classification head for real-time safety monitoring during incremental text generation. Both variants are available in three sizes (0.6B, 4B, and 8B parameters) and support up to 119 languages and dialects, providing comprehensive, scalable, and low-latency safety moderation for global LLM deployments. Evaluated across English, Chinese, and multilingual benchmarks, Qwen3Guard achieves state-of-the-art performance in both prompt and response safety classification. All models are released under the Apache 2.0 license for public use.
Direct Simultaneous Translation Activation for Large Audio-Language Models
Sep 19, 2025



Simultaneous speech-to-text translation (Simul-S2TT) aims to translate speech into target text in real time, outputting translations while receiving source speech input, rather than waiting for the entire utterance to be spoken. Simul-S2TT research often modifies model architectures to implement read-write strategies. However, with the rise of large audio-language models (LALMs), a key challenge is how to directly activate Simul-S2TT capabilities in base models without additional architectural changes. In this paper, we introduce {\bf Simul}taneous {\bf S}elf-{\bf A}ugmentation ({\bf SimulSA}), a strategy that utilizes LALMs' inherent capabilities to obtain simultaneous data by randomly truncating speech and constructing partially aligned translation. By incorporating them into offline SFT data, SimulSA effectively bridges the distribution gap between offline translation during pretraining and simultaneous translation during inference. Experimental results demonstrate that augmenting only about {\bf 1\%} of the simultaneous data, compared to the full offline SFT data, can significantly activate LALMs' Simul-S2TT capabilities without modifications to model architecture or decoding strategy.
Intelligent Sampling of Extreme-Scale Turbulence Datasets for Accurate and Efficient Spatiotemporal Model Training
Aug 05, 2025With the end of Moore's law and Dennard scaling, efficient training increasingly requires rethinking data volume. Can we train better models with significantly less data via intelligent subsampling? To explore this, we develop SICKLE, a sparse intelligent curation framework for efficient learning, featuring a novel maximum entropy (MaxEnt) sampling approach, scalable training, and energy benchmarking. We compare MaxEnt with random and phase-space sampling on large direct numerical simulation (DNS) datasets of turbulence. Evaluating SICKLE at scale on Frontier, we show that subsampling as a preprocessing step can improve model accuracy and substantially lower energy consumption, with reductions of up to 38x observed in certain cases.
Pixel-Resolved Long-Context Learning for Turbulence at Exascale: Resolving Small-scale Eddies Toward the Viscous Limit
Jul 22, 2025Turbulence plays a crucial role in multiphysics applications, including aerodynamics, fusion, and combustion. Accurately capturing turbulence's multiscale characteristics is essential for reliable predictions of multiphysics interactions, but remains a grand challenge even for exascale supercomputers and advanced deep learning models. The extreme-resolution data required to represent turbulence, ranging from billions to trillions of grid points, pose prohibitive computational costs for models based on architectures like vision transformers. To address this challenge, we introduce a multiscale hierarchical Turbulence Transformer that reduces sequence length from billions to a few millions and a novel RingX sequence parallelism approach that enables scalable long-context learning. We perform scaling and science runs on the Frontier supercomputer. Our approach demonstrates excellent performance up to 1.1 EFLOPS on 32,768 AMD GPUs, with a scaling efficiency of 94%. To our knowledge, this is the first AI model for turbulence that can capture small-scale eddies down to the dissipative range.
Translationese-index: Using Likelihood Ratios for Graded and Generalizable Measurement of Translationese
Jul 16, 2025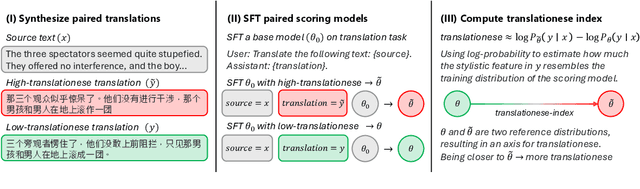
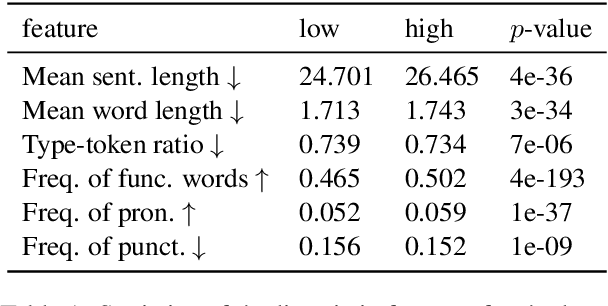
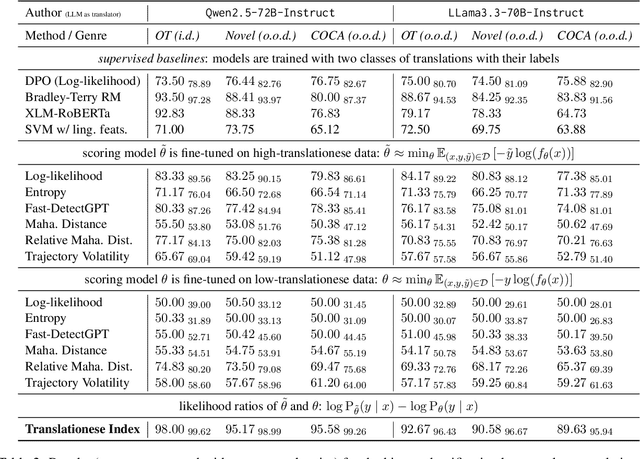
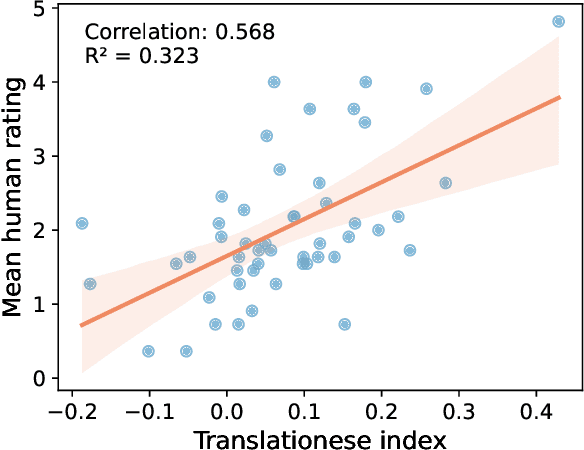
In this paper, we propose the first quantitative measure for translationese -- the translationese-index (T-index) for graded and generalizable measurement of translationese, computed from the likelihood ratios of two contrastively fine-tuned language models (LMs). We use a synthesized dataset and a dataset with translations in the wild to evaluate T-index's generalizability in cross-domain settings and its validity against human judgments. Our results show that T-index is both robust and efficient. T-index scored by two 0.5B LMs fine-tuned on only 1-5k pairs of synthetic data can well capture translationese in the wild. We find that the relative differences in T-indices between translations can well predict pairwise translationese annotations obtained from human annotators; and the absolute values of T-indices correlate well with human ratings of degrees of translationese (Pearson's $r = 0.568$). Additionally, the correlation between T-index and existing machine translation (MT) quality estimation (QE) metrics such as BLEU and COMET is low, suggesting that T-index is not covered by these metrics and can serve as a complementary metric in MT QE.
ConText: Driving In-context Learning for Text Removal and Segmentation
Jun 04, 2025This paper presents the first study on adapting the visual in-context learning (V-ICL) paradigm to optical character recognition tasks, specifically focusing on text removal and segmentation. Most existing V-ICL generalists employ a reasoning-as-reconstruction approach: they turn to using a straightforward image-label compositor as the prompt and query input, and then masking the query label to generate the desired output. This direct prompt confines the model to a challenging single-step reasoning process. To address this, we propose a task-chaining compositor in the form of image-removal-segmentation, providing an enhanced prompt that elicits reasoning with enriched intermediates. Additionally, we introduce context-aware aggregation, integrating the chained prompt pattern into the latent query representation, thereby strengthening the model's in-context reasoning. We also consider the issue of visual heterogeneity, which complicates the selection of homogeneous demonstrations in text recognition. Accordingly, this is effectively addressed through a simple self-prompting strategy, preventing the model's in-context learnability from devolving into specialist-like, context-free inference. Collectively, these insights culminate in our ConText model, which achieves new state-of-the-art across both in- and out-of-domain benchmarks. The code is available at https://github.com/Ferenas/ConText.
Qwen3 Technical Report
May 14, 2025



In this work, we present Qwen3, the latest version of the Qwen model family. Qwen3 comprises a series of large language models (LLMs) designed to advance performance, efficiency, and multilingual capabilities. The Qwen3 series includes models of both dense and Mixture-of-Expert (MoE) architectures, with parameter scales ranging from 0.6 to 235 billion. A key innovation in Qwen3 is the integration of thinking mode (for complex, multi-step reasoning) and non-thinking mode (for rapid, context-driven responses) into a unified framework. This eliminates the need to switch between different models--such as chat-optimized models (e.g., GPT-4o) and dedicated reasoning models (e.g., QwQ-32B)--and enables dynamic mode switching based on user queries or chat templates. Meanwhile, Qwen3 introduces a thinking budget mechanism, allowing users to allocate computational resources adaptively during inference, thereby balancing latency and performance based on task complexity. Moreover, by leveraging the knowledge from the flagship models, we significantly reduce the computational resources required to build smaller-scale models, while ensuring their highly competitive performance. Empirical evaluations demonstrate that Qwen3 achieves state-of-the-art results across diverse benchmarks, including tasks in code generation, mathematical reasoning, agent tasks, etc., competitive against larger MoE models and proprietary models. Compared to its predecessor Qwen2.5, Qwen3 expands multilingual support from 29 to 119 languages and dialects, enhancing global accessibility through improved cross-lingual understanding and generation capabilities. To facilitate reproducibility and community-driven research and development, all Qwen3 models are publicly accessible under Apache 2.0.