 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnsupervised Discovery of Parts, Structure, and Dynamics
Mar 12, 2019
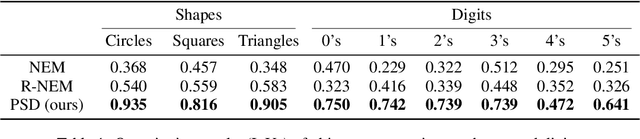
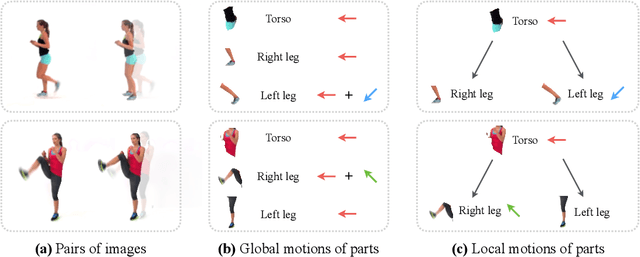

Humans easily recognize object parts and their hierarchical structure by watching how they move; they can then predict how each part moves in the future. In this paper, we propose a novel formulation that simultaneously learns a hierarchical, disentangled object representation and a dynamics model for object parts from unlabeled videos. Our Parts, Structure, and Dynamics (PSD) model learns to, first, recognize the object parts via a layered image representation; second, predict hierarchy via a structural descriptor that composes low-level concepts into a hierarchical structure; and third, model the system dynamics by predicting the future. Experiments on multiple real and synthetic datasets demonstrate that our PSD model works well on all three tasks: segmenting object parts, building their hierarchical structure, and capturing their motion distributions.
Visualizing and Understanding Generative Adversarial Networks (Extended Abstract)
Jan 29, 2019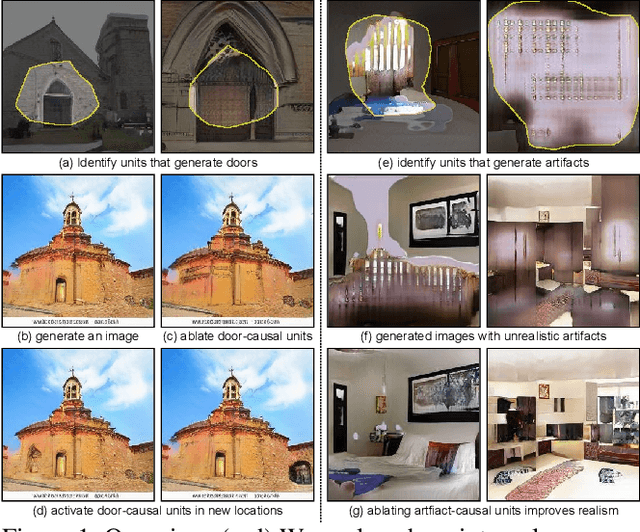
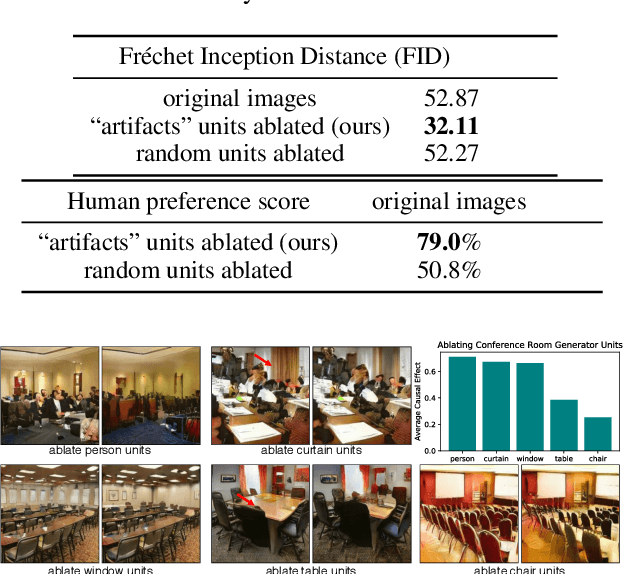
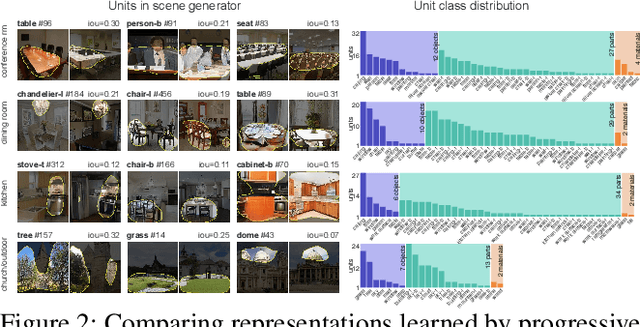
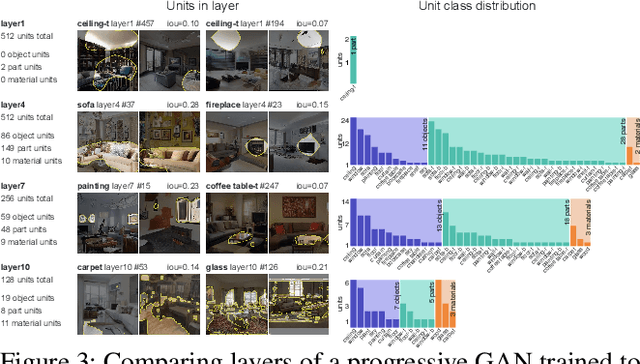
Generative Adversarial Networks (GANs) have achieved impressive results for many real-world applications. As an active research topic, many GAN variants have emerged with improvements in sample quality and training stability. However, visualization and understanding of GANs is largely missing. How does a GAN represent our visual world internally? What causes the artifacts in GAN results? How do architectural choices affect GAN learning? Answering such questions could enable us to develop new insights and better models. In this work, we present an analytic framework to visualize and understand GANs at the unit-, object-, and scene-level. We first identify a group of interpretable units that are closely related to concepts with a segmentation-based network dissection method. We quantify the causal effect of interpretable units by measuring the ability of interventions to control objects in the output. Finally, we examine the contextual relationship between these units and their surrounding by inserting the discovered concepts into new images. We show several practical applications enabled by our framework, from comparing internal representations across different layers, models, and datasets, to improving GANs by locating and removing artifact-causing units, to interactively manipulating objects in the scene. We will open source our interactive tools to help researchers and practitioners better understand their models.
Learning to Infer and Execute 3D Shape Programs
Jan 09, 2019
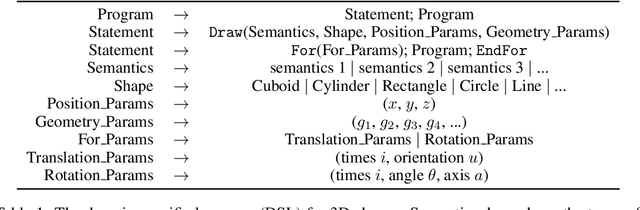
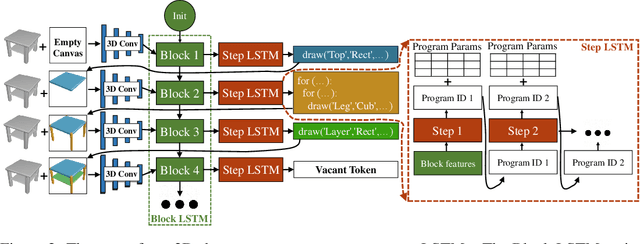
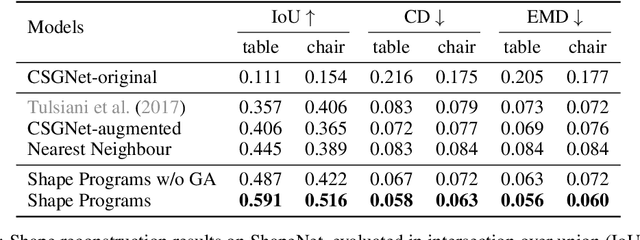
Human perception of 3D shapes goes beyond reconstructing them as a set of points or a composition of geometric primitives: we also effortlessly understand higher-level shape structure such as the repetition and reflective symmetry of object parts. In contrast, recent advances in 3D shape sensing focus more on low-level geometry but less on these higher-level relationships. In this paper, we propose 3D shape programs, integrating bottom-up recognition systems with top-down, symbolic program structure to capture both low-level geometry and high-level structural priors for 3D shapes. Because there are no annotations of shape programs for real shapes, we develop neural modules that not only learn to infer 3D shape programs from raw, unannotated shapes, but also to execute these programs for shape reconstruction. After initial bootstrapping, our end-to-end differentiable model learns 3D shape programs by reconstructing shapes in a self-supervised manner. Experiments demonstrate that our model accurately infers and executes 3D shape programs for highly complex shapes from various categories. It can also be integrated with an image-to-shape module to infer 3D shape programs directly from an RGB image, leading to 3D shape reconstructions that are both more accurate and more physically plausible.
Reasoning About Physical Interactions with Object-Oriented Prediction and Planning
Jan 07, 2019

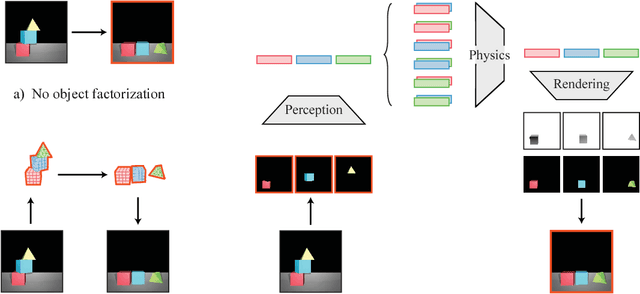
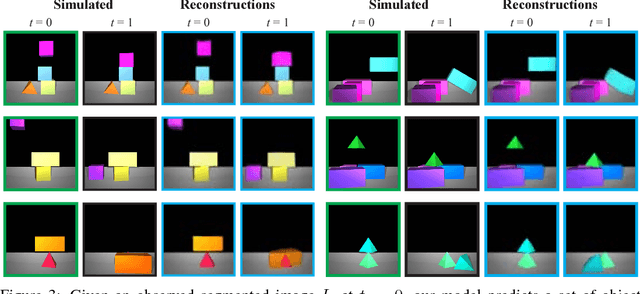
Object-based factorizations provide a useful level of abstraction for interacting with the world. Building explicit object representations, however, often requires supervisory signals that are difficult to obtain in practice. We present a paradigm for learning object-centric representations for physical scene understanding without direct supervision of object properties. Our model, Object-Oriented Prediction and Planning (O2P2), jointly learns a perception function to map from image observations to object representations, a pairwise physics interaction function to predict the time evolution of a collection of objects, and a rendering function to map objects back to pixels. For evaluation, we consider not only the accuracy of the physical predictions of the model, but also its utility for downstream tasks that require an actionable representation of intuitive physics. After training our model on an image prediction task, we can use its learned representations to build block towers more complicated than those observed during training.
Learning to Reconstruct Shapes from Unseen Classes
Dec 28, 2018
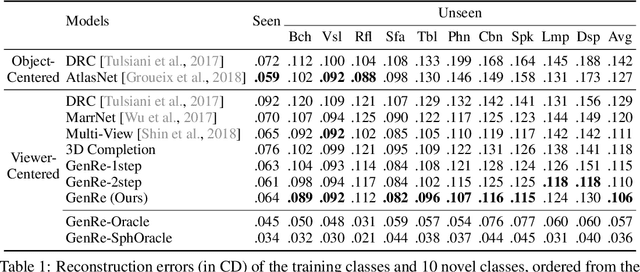

From a single image, humans are able to perceive the full 3D shape of an object by exploiting learned shape priors from everyday life. Contemporary single-image 3D reconstruction algorithms aim to solve this task in a similar fashion, but often end up with priors that are highly biased by training classes. Here we present an algorithm, Generalizable Reconstruction (GenRe), designed to capture more generic, class-agnostic shape priors. We achieve this with an inference network and training procedure that combine 2.5D representations of visible surfaces (depth and silhouette), spherical shape representations of both visible and non-visible surfaces, and 3D voxel-based representations, in a principled manner that exploits the causal structure of how 3D shapes give rise to 2D images. Experiments demonstrate that GenRe performs well on single-view shape reconstruction, and generalizes to diverse novel objects from categories not seen during training.
GAN Dissection: Visualizing and Understanding Generative Adversarial Networks
Dec 08, 2018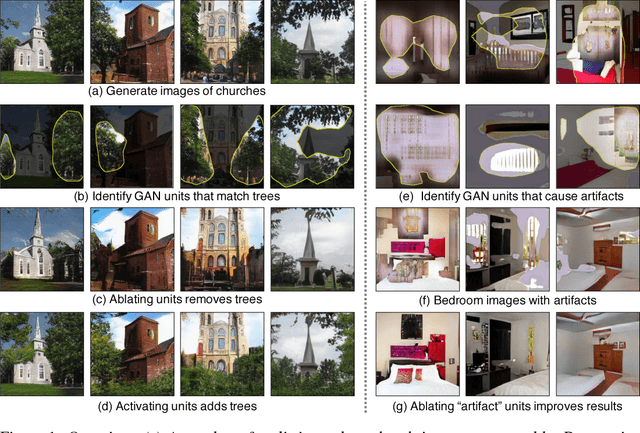
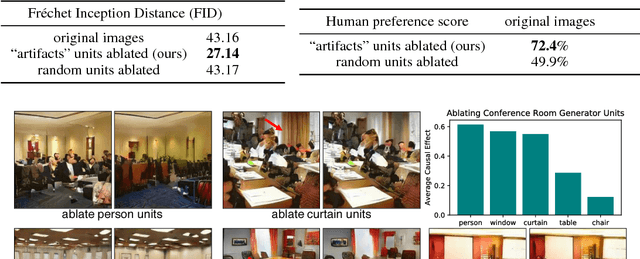
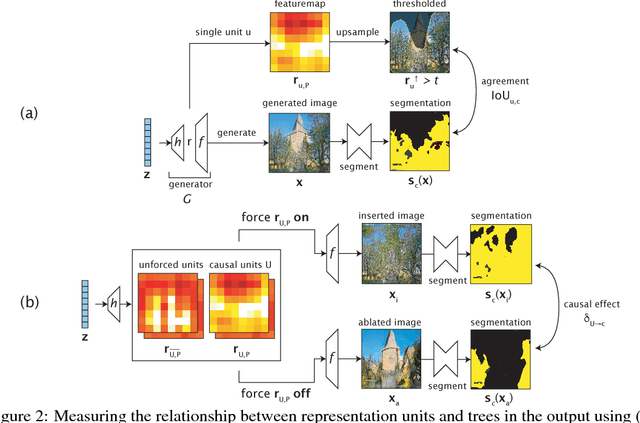
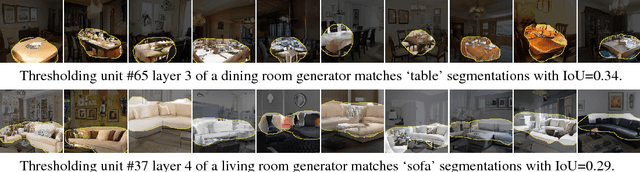
Generative Adversarial Networks (GANs) have recently achieved impressive results for many real-world applications, and many GAN variants have emerged with improvements in sample quality and training stability. However, they have not been well visualized or understood. How does a GAN represent our visual world internally? What causes the artifacts in GAN results? How do architectural choices affect GAN learning? Answering such questions could enable us to develop new insights and better models. In this work, we present an analytic framework to visualize and understand GANs at the unit-, object-, and scene-level. We first identify a group of interpretable units that are closely related to object concepts using a segmentation-based network dissection method. Then, we quantify the causal effect of interpretable units by measuring the ability of interventions to control objects in the output. We examine the contextual relationship between these units and their surroundings by inserting the discovered object concepts into new images. We show several practical applications enabled by our framework, from comparing internal representations across different layers, models, and datasets, to improving GANs by locating and removing artifact-causing units, to interactively manipulating objects in a scene. We provide open source interpretation tools to help researchers and practitioners better understand their GAN models.
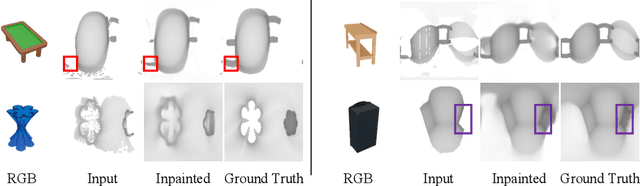
Visual Object Networks: Image Generation with Disentangled 3D Representation
Dec 06, 2018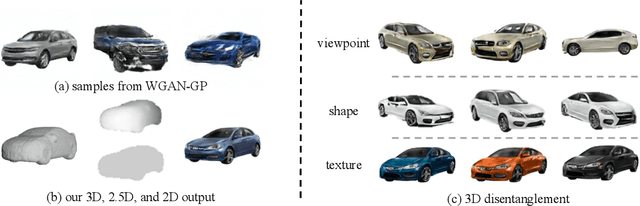
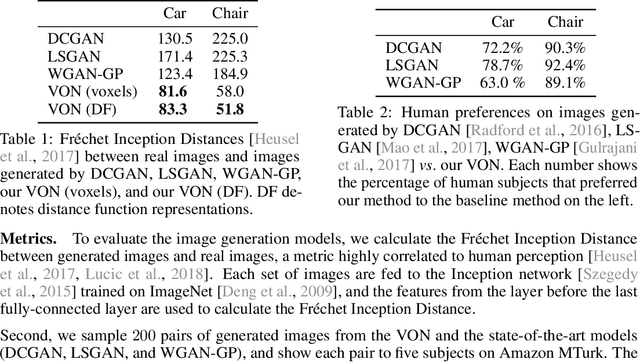
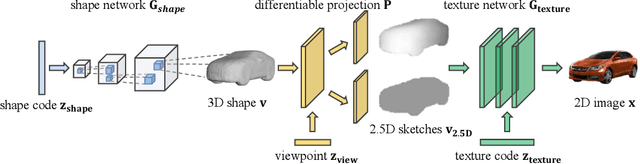
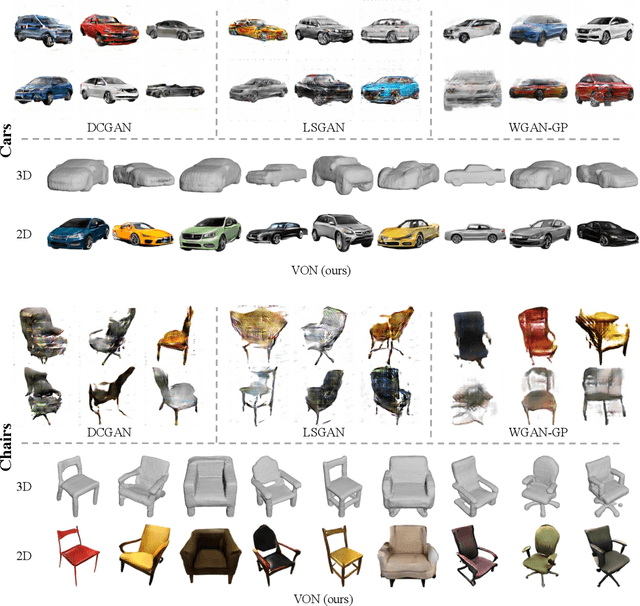
Recent progress in deep generative models has led to tremendous breakthroughs in image generation. However, while existing models can synthesize photorealistic images, they lack an understanding of our underlying 3D world. We present a new generative model, Visual Object Networks (VON), synthesizing natural images of objects with a disentangled 3D representation. Inspired by classic graphics rendering pipelines, we unravel our image formation process into three conditionally independent factors---shape, viewpoint, and texture---and present an end-to-end adversarial learning framework that jointly models 3D shapes and 2D images. Our model first learns to synthesize 3D shapes that are indistinguishable from real shapes. It then renders the object's 2.5D sketches (i.e., silhouette and depth map) from its shape under a sampled viewpoint. Finally, it learns to add realistic texture to these 2.5D sketches to generate natural images. The VON not only generates images that are more realistic than state-of-the-art 2D image synthesis methods, but also enables many 3D operations such as changing the viewpoint of a generated image, editing of shape and texture, linear interpolation in texture and shape space, and transferring appearance across different objects and viewpoints.
Co-regularized Alignment for Unsupervised Domain Adaptation
Nov 13, 2018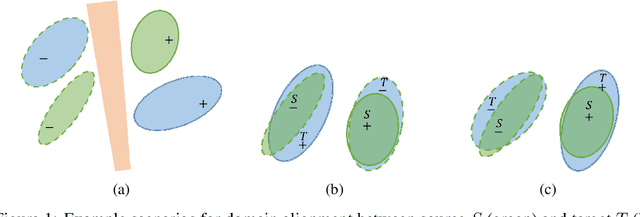
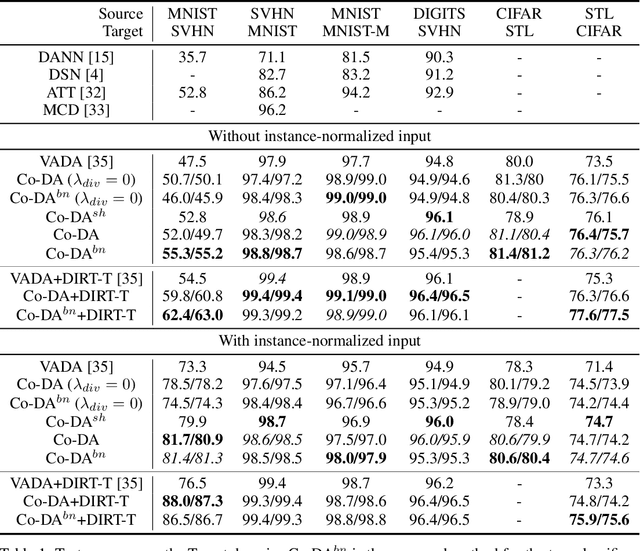
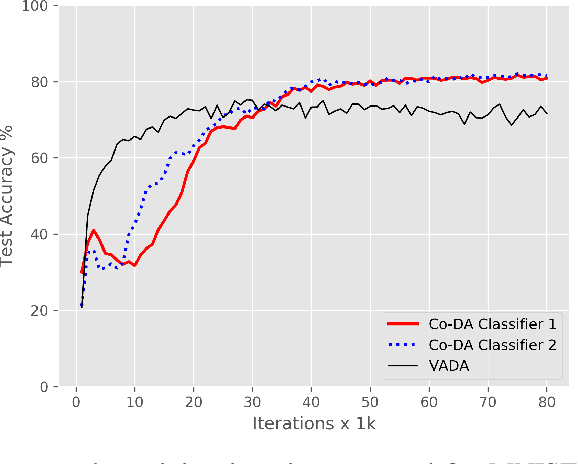
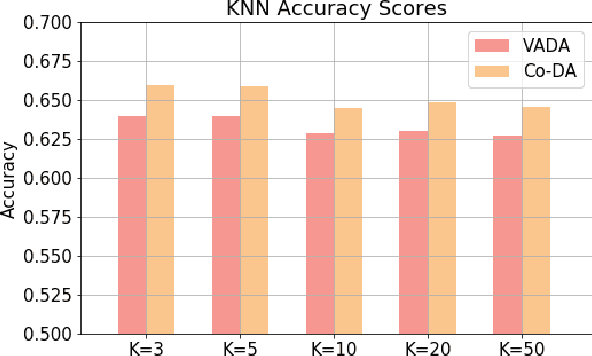
Deep neural networks, trained with large amount of labeled data, can fail to generalize well when tested with examples from a \emph{target domain} whose distribution differs from the training data distribution, referred as the \emph{source domain}. It can be expensive or even infeasible to obtain required amount of labeled data in all possible domains. Unsupervised domain adaptation sets out to address this problem, aiming to learn a good predictive model for the target domain using labeled examples from the source domain but only unlabeled examples from the target domain. Domain alignment approaches this problem by matching the source and target feature distributions, and has been used as a key component in many state-of-the-art domain adaptation methods. However, matching the marginal feature distributions does not guarantee that the corresponding class conditional distributions will be aligned across the two domains. We propose co-regularized domain alignment for unsupervised domain adaptation, which constructs multiple diverse feature spaces and aligns source and target distributions in each of them individually, while encouraging that alignments agree with each other with regard to the class predictions on the unlabeled target examples. The proposed method is generic and can be used to improve any domain adaptation method which uses domain alignment. We instantiate it in the context of a recent state-of-the-art method and observe that it provides significant performance improvements on several domain adaptation benchmarks.
3D-Aware Scene Manipulation via Inverse Graphics
Oct 11, 2018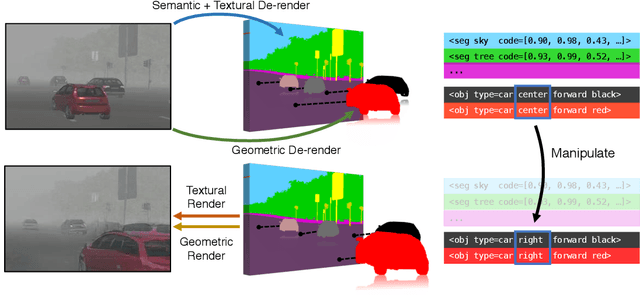

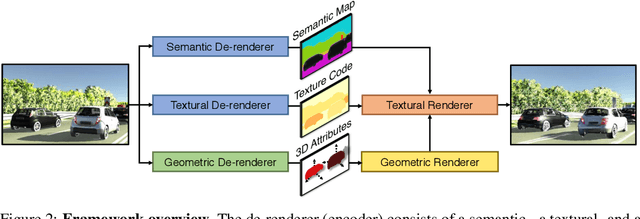
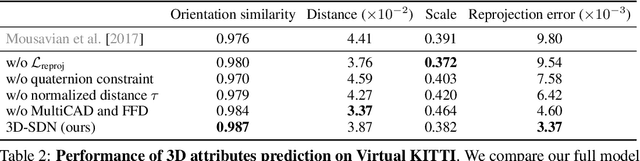
We aim to obtain an interpretable, expressive, and disentangled scene representation that contains comprehensive structural and textural information for each object. Previous scene representations learned by neural networks are often uninterpretable, limited to a single object, or lacking 3D knowledge. In this work, we propose 3D scene de-rendering networks (3D-SDN) to address the above issues by integrating disentangled representations for semantics, geometry, and appearance into a deep generative model. Our scene encoder performs inverse graphics, translating a scene into a structured object-wise representation. Our decoder has two components: a differentiable shape renderer and a neural texture generator. The disentanglement of semantics, geometry, and appearance supports 3D-aware scene manipulation, e.g., rotating and moving objects freely while keeping the consistent shape and texture, and changing the object appearance without affecting its shape. Experiments demonstrate that our editing scheme based on 3D-SDN is superior to its 2D counterpart.
ChainQueen: A Real-Time Differentiable Physical Simulator for Soft Robotics
Oct 02, 2018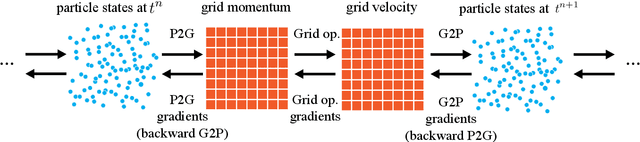
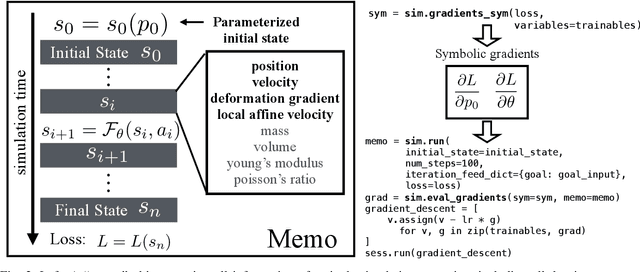
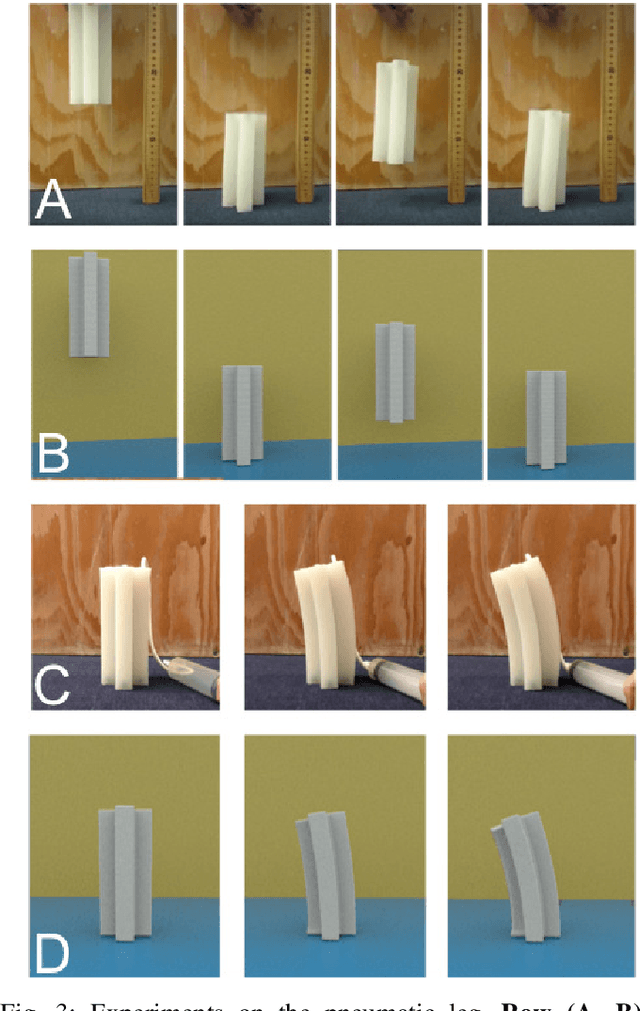
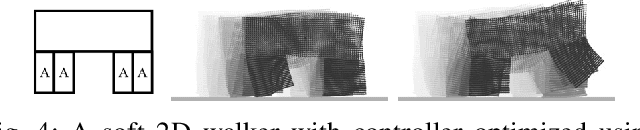
Physical simulators have been widely used in robot planning and control. Among them, differentiable simulators are particularly favored, as they can be incorporated into gradient-based optimization algorithms that are efficient in solving inverse problems such as optimal control and motion planning. Simulating deformable objects is, however, more challenging compared to rigid body dynamics. The underlying physical laws of deformable objects are more complex, and the resulting systems have orders of magnitude more degrees of freedom and therefore they are significantly more computationally expensive to simulate. Computing gradients with respect to physical design or controller parameters is typically even more computationally challenging. In this paper, we propose a real-time, differentiable hybrid Lagrangian-Eulerian physical simulator for deformable objects, ChainQueen, based on the Moving Least Squares Material Point Method (MLS-MPM). MLS-MPM can simulate deformable objects including contact and can be seamlessly incorporated into inference, control and co-design systems. We demonstrate that our simulator achieves high precision in both forward simulation and backward gradient computation. We have successfully employed it in a diverse set of control tasks for soft robots, including problems with nearly 3,000 decision variables.