 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFastComposer: Tuning-Free Multi-Subject Image Generation with Localized Attention
May 21, 2023



Diffusion models excel at text-to-image generation, especially in subject-driven generation for personalized images. However, existing methods are inefficient due to the subject-specific fine-tuning, which is computationally intensive and hampers efficient deployment. Moreover, existing methods struggle with multi-subject generation as they often blend features among subjects. We present FastComposer which enables efficient, personalized, multi-subject text-to-image generation without fine-tuning. FastComposer uses subject embeddings extracted by an image encoder to augment the generic text conditioning in diffusion models, enabling personalized image generation based on subject images and textual instructions with only forward passes. To address the identity blending problem in the multi-subject generation, FastComposer proposes cross-attention localization supervision during training, enforcing the attention of reference subjects localized to the correct regions in the target images. Naively conditioning on subject embeddings results in subject overfitting. FastComposer proposes delayed subject conditioning in the denoising step to maintain both identity and editability in subject-driven image generation. FastComposer generates images of multiple unseen individuals with different styles, actions, and contexts. It achieves 300$\times$-2500$\times$ speedup compared to fine-tuning-based methods and requires zero extra storage for new subjects. FastComposer paves the way for efficient, personalized, and high-quality multi-subject image creation. Code, model, and dataset are available at https://github.com/mit-han-lab/fastcomposer.
Score-Based Diffusion Models as Principled Priors for Inverse Imaging
Apr 23, 2023



It is important in computational imaging to understand the uncertainty of images reconstructed from imperfect measurements. We propose turning score-based diffusion models into principled priors (``score-based priors'') for analyzing a posterior of images given measurements. Previously, probabilistic priors were limited to handcrafted regularizers and simple distributions. In this work, we empirically validate the theoretically-proven probability function of a score-based diffusion model. We show how to sample from resulting posteriors by using this probability function for variational inference. Our results, including experiments on denoising, deblurring, and interferometric imaging, suggest that score-based priors enable principled inference with a sophisticated, data-driven image prior.
Muse: Text-To-Image Generation via Masked Generative Transformers
Jan 02, 2023



We present Muse, a text-to-image Transformer model that achieves state-of-the-art image generation performance while being significantly more efficient than diffusion or autoregressive models. Muse is trained on a masked modeling task in discrete token space: given the text embedding extracted from a pre-trained large language model (LLM), Muse is trained to predict randomly masked image tokens. Compared to pixel-space diffusion models, such as Imagen and DALL-E 2, Muse is significantly more efficient due to the use of discrete tokens and requiring fewer sampling iterations; compared to autoregressive models, such as Parti, Muse is more efficient due to the use of parallel decoding. The use of a pre-trained LLM enables fine-grained language understanding, translating to high-fidelity image generation and the understanding of visual concepts such as objects, their spatial relationships, pose, cardinality etc. Our 900M parameter model achieves a new SOTA on CC3M, with an FID score of 6.06. The Muse 3B parameter model achieves an FID of 7.88 on zero-shot COCO evaluation, along with a CLIP score of 0.32. Muse also directly enables a number of image editing applications without the need to fine-tune or invert the model: inpainting, outpainting, and mask-free editing. More results are available at https://muse-model.github.io
MetaCLUE: Towards Comprehensive Visual Metaphors Research
Dec 19, 2022



Creativity is an indispensable part of human cognition and also an inherent part of how we make sense of the world. Metaphorical abstraction is fundamental in communicating creative ideas through nuanced relationships between abstract concepts such as feelings. While computer vision benchmarks and approaches predominantly focus on understanding and generating literal interpretations of images, metaphorical comprehension of images remains relatively unexplored. Towards this goal, we introduce MetaCLUE, a set of vision tasks on visual metaphor. We also collect high-quality and rich metaphor annotations (abstract objects, concepts, relationships along with their corresponding object boxes) as there do not exist any datasets that facilitate the evaluation of these tasks. We perform a comprehensive analysis of state-of-the-art models in vision and language based on our annotations, highlighting strengths and weaknesses of current approaches in visual metaphor Classification, Localization, Understanding (retrieval, question answering, captioning) and gEneration (text-to-image synthesis) tasks. We hope this work provides a concrete step towards developing AI systems with human-like creative capabilities.
Can Shadows Reveal Biometric Information?
Oct 04, 2022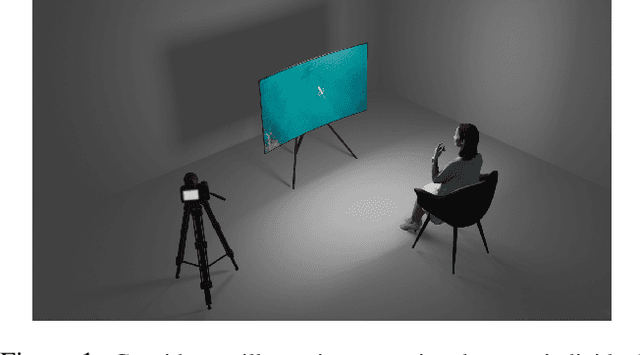

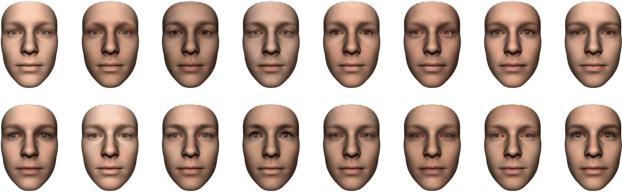
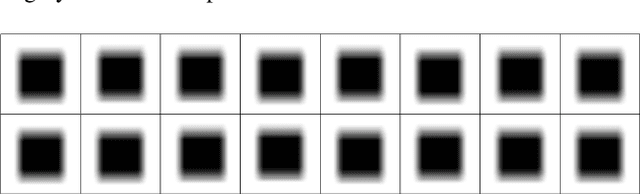
We study the problem of extracting biometric information of individuals by looking at shadows of objects cast on diffuse surfaces. We show that the biometric information leakage from shadows can be sufficient for reliable identity inference under representative scenarios via a maximum likelihood analysis. We then develop a learning-based method that demonstrates this phenomenon in real settings, exploiting the subtle cues in the shadows that are the source of the leakage without requiring any labeled real data. In particular, our approach relies on building synthetic scenes composed of 3D face models obtained from a single photograph of each identity. We transfer what we learn from the synthetic data to the real data using domain adaptation in a completely unsupervised way. Our model is able to generalize well to the real domain and is robust to several variations in the scenes. We report high classification accuracies in an identity classification task that takes place in a scene with unknown geometry and occluding objects.
Seeing 3D Objects in a Single Image via Self-Supervised Static-Dynamic Disentanglement
Jul 22, 2022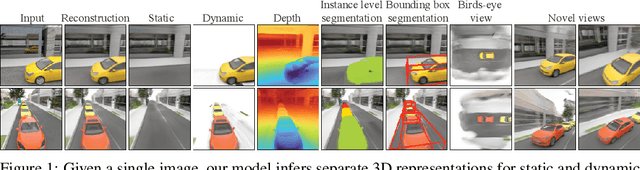
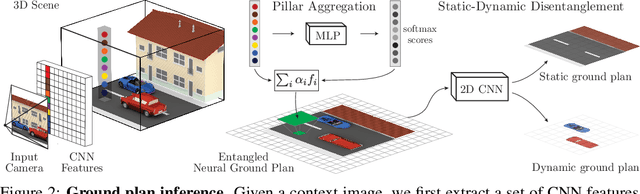
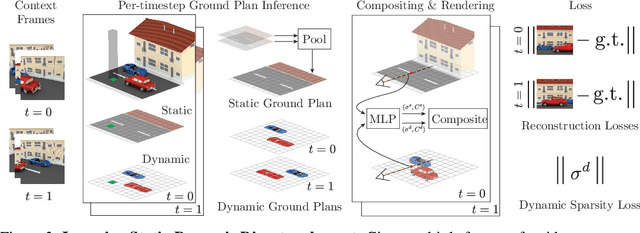

Human perception reliably identifies movable and immovable parts of 3D scenes, and completes the 3D structure of objects and background from incomplete observations. We learn this skill not via labeled examples, but simply by observing objects move. In this work, we propose an approach that observes unlabeled multi-view videos at training time and learns to map a single image observation of a complex scene, such as a street with cars, to a 3D neural scene representation that is disentangled into movable and immovable parts while plausibly completing its 3D structure. We separately parameterize movable and immovable scene parts via 2D neural ground plans. These ground plans are 2D grids of features aligned with the ground plane that can be locally decoded into 3D neural radiance fields. Our model is trained self-supervised via neural rendering. We demonstrate that the structure inherent to our disentangled 3D representation enables a variety of downstream tasks in street-scale 3D scenes using simple heuristics, such as extraction of object-centric 3D representations, novel view synthesis, instance segmentation, and 3D bounding box prediction, highlighting its value as a backbone for data-efficient 3D scene understanding models. This disentanglement further enables scene editing via object manipulation such as deletion, insertion, and rigid-body motion.
What Makes RAFT Better Than PWC-Net?
Mar 21, 2022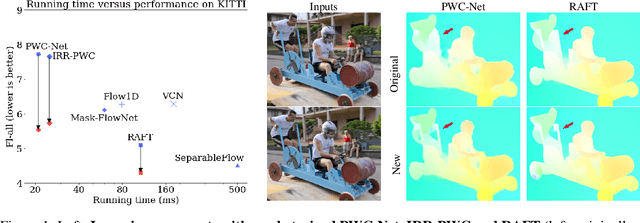
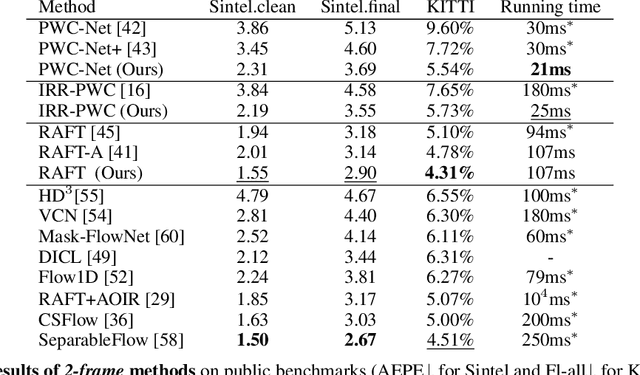
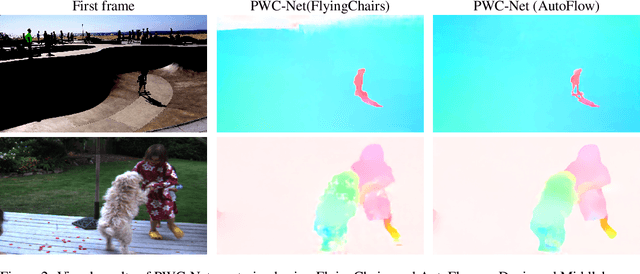
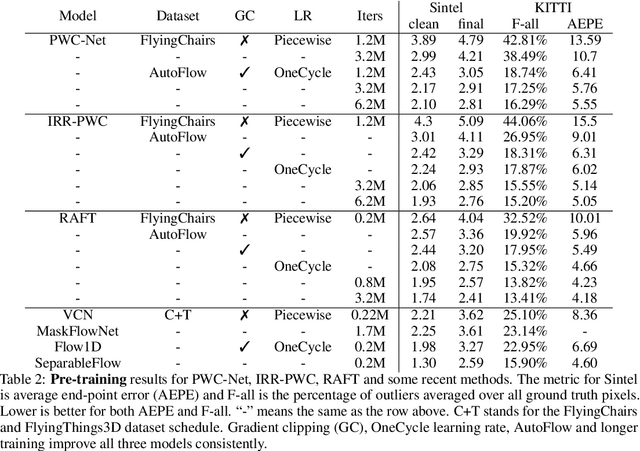
How important are training details and datasets to recent optical flow models like RAFT? And do they generalize? To explore these questions, rather than develop a new model, we revisit three prominent models, PWC-Net, IRR-PWC and RAFT, with a common set of modern training techniques and datasets, and observe significant performance gains, demonstrating the importance and generality of these training details. Our newly trained PWC-Net and IRR-PWC models show surprisingly large improvements, up to 30% versus original published results on Sintel and KITTI 2015 benchmarks. They outperform the more recent Flow1D on KITTI 2015 while being 3x faster during inference. Our newly trained RAFT achieves an Fl-all score of 4.31% on KITTI 2015, more accurate than all published optical flow methods at the time of writing. Our results demonstrate the benefits of separating the contributions of models, training techniques and datasets when analyzing performance gains of optical flow methods. Our source code will be publicly available.
Unsupervised Semantic Segmentation by Distilling Feature Correspondences
Mar 16, 2022



Unsupervised semantic segmentation aims to discover and localize semantically meaningful categories within image corpora without any form of annotation. To solve this task, algorithms must produce features for every pixel that are both semantically meaningful and compact enough to form distinct clusters. Unlike previous works which achieve this with a single end-to-end framework, we propose to separate feature learning from cluster compactification. Empirically, we show that current unsupervised feature learning frameworks already generate dense features whose correlations are semantically consistent. This observation motivates us to design STEGO ($\textbf{S}$elf-supervised $\textbf{T}$ransformer with $\textbf{E}$nergy-based $\textbf{G}$raph $\textbf{O}$ptimization), a novel framework that distills unsupervised features into high-quality discrete semantic labels. At the core of STEGO is a novel contrastive loss function that encourages features to form compact clusters while preserving their relationships across the corpora. STEGO yields a significant improvement over the prior state of the art, on both the CocoStuff ($\textbf{+14 mIoU}$) and Cityscapes ($\textbf{+9 mIoU}$) semantic segmentation challenges.
MaskGIT: Masked Generative Image Transformer
Feb 08, 2022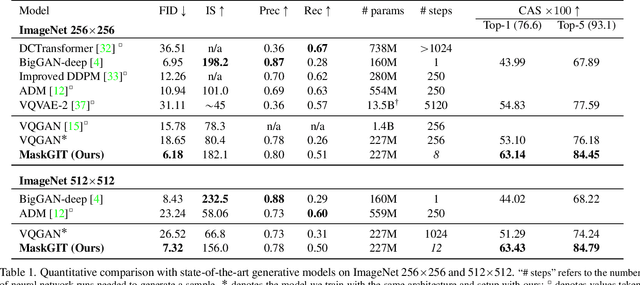
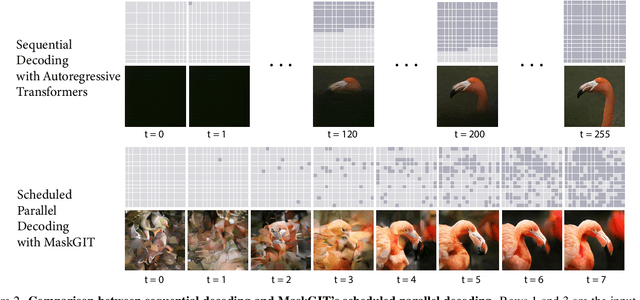
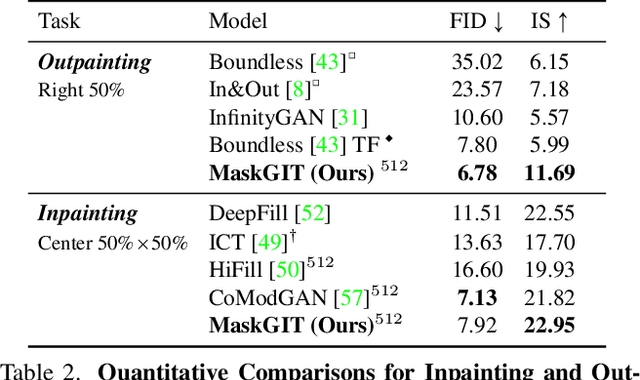
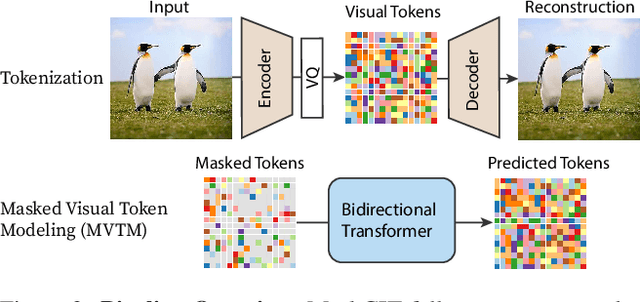
Generative transformers have experienced rapid popularity growth in the computer vision community in synthesizing high-fidelity and high-resolution images. The best generative transformer models so far, however, still treat an image naively as a sequence of tokens, and decode an image sequentially following the raster scan ordering (i.e. line-by-line). We find this strategy neither optimal nor efficient. This paper proposes a novel image synthesis paradigm using a bidirectional transformer decoder, which we term MaskGIT. During training, MaskGIT learns to predict randomly masked tokens by attending to tokens in all directions. At inference time, the model begins with generating all tokens of an image simultaneously, and then refines the image iteratively conditioned on the previous generation. Our experiments demonstrate that MaskGIT significantly outperforms the state-of-the-art transformer model on the ImageNet dataset, and accelerates autoregressive decoding by up to 64x. Besides, we illustrate that MaskGIT can be easily extended to various image editing tasks, such as inpainting, extrapolation, and image manipulation.
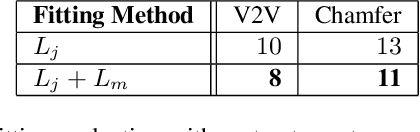
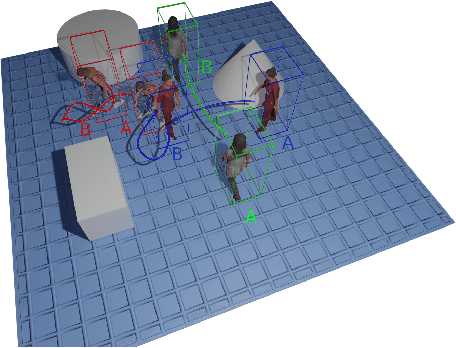
HSPACE: Synthetic Parametric Humans Animated in Complex Environments
Jan 06, 2022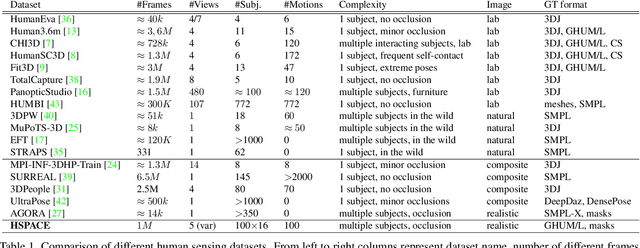
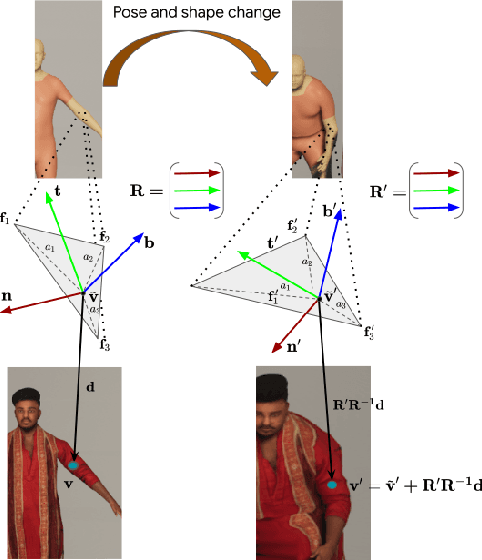
Advances in the state of the art for 3d human sensing are currently limited by the lack of visual datasets with 3d ground truth, including multiple people, in motion, operating in real-world environments, with complex illumination or occlusion, and potentially observed by a moving camera. Sophisticated scene understanding would require estimating human pose and shape as well as gestures, towards representations that ultimately combine useful metric and behavioral signals with free-viewpoint photo-realistic visualisation capabilities. To sustain progress, we build a large-scale photo-realistic dataset, Human-SPACE (HSPACE), of animated humans placed in complex synthetic indoor and outdoor environments. We combine a hundred diverse individuals of varying ages, gender, proportions, and ethnicity, with hundreds of motions and scenes, as well as parametric variations in body shape (for a total of 1,600 different humans), in order to generate an initial dataset of over 1 million frames. Human animations are obtained by fitting an expressive human body model, GHUM, to single scans of people, followed by novel re-targeting and positioning procedures that support the realistic animation of dressed humans, statistical variation of body proportions, and jointly consistent scene placement of multiple moving people. Assets are generated automatically, at scale, and are compatible with existing real time rendering and game engines. The dataset with evaluation server will be made available for research. Our large-scale analysis of the impact of synthetic data, in connection with real data and weak supervision, underlines the considerable potential for continuing quality improvements and limiting the sim-to-real gap, in this practical setting, in connection with increased model capacity.