 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeArticulated-Body Dynamics Network: Dynamics-Grounded Prior for Robot Learning
Mar 19, 2026Recent work in reinforcement learning has shown that incorporating structural priors for articulated robots, such as link connectivity, into policy networks improves learning efficiency. However, dynamics properties, despite their fundamental role in determining how forces and motion propagate through the body, remain largely underexplored as an inductive bias for policy learning. To address this gap, we present the Articulated-Body Dynamics Network (ABD-Net), a novel graph neural network architecture grounded in the computational structure of forward dynamics. Specifically, we adapt the inertia propagation mechanism from the Articulated Body Algorithm, systematically aggregating inertial quantities from child to parent links in a tree-structured manner, while replacing physical quantities with learnable parameters. Embedding ABD-NET into the policy actor enables dynamics-informed representations that capture how actions propagate through the body, leading to efficient and robust policy learning. Through experiments with simulated humanoid, quadruped, and hopper robots, our approach demonstrates increased sample efficiency and generalization to dynamics shifts compared to transformer-based and GNN baselines. We further validate the learned policy on real Unitree G1 and Go2 robots, state-of-the-art humanoid and quadruped platforms, generating dynamic, versatile and robust locomotion behaviors through sim-to-real transfer with real-time inference.
Efficient and Versatile Quadrupedal Skating: Optimal Co-design via Reinforcement Learning and Bayesian Optimization
Mar 19, 2026In this paper, we present a hardware-control co-design approach that enables efficient and versatile roller skating on quadrupedal robots equipped with passive wheels. Passive-wheel skating reduces leg inertia and improves energy efficiency, particularly at high speeds. However, the absence of direct wheel actuation tightly couples mechanical design and control. To unlock the full potential of this modality, we formulate a bilevel optimization framework: an upper-level Bayesian Optimization searches the mechanical design space, while a lower-level Reinforcement Learning trains a motor control policy for each candidate design. The resulting design-policy pairs not only outperform human-engineered baselines, but also exhibit versatile behaviors such as hockey stop (rapid braking by turning sideways to maximize friction) and self-aligning motion (automatic reorientation to improve energy efficiency in the direction of travel), offering the first system-level study of dynamic skating motion on quadrupedal robots.
SPARK: Skeleton-Parameter Aligned Retargeting on Humanoid Robots with Kinodynamic Trajectory Optimization
Mar 12, 2026Human motion provides rich priors for training general-purpose humanoid control policies, but raw demonstrations are often incompatible with a robot's kinematics and dynamics, limiting their direct use. We present a two-stage pipeline for generating natural and dynamically feasible motion references from task-space human data. First, we convert human motion into a unified robot description format (URDF)-based skeleton representation and calibrate it to the target humanoid's dimensions. By aligning the underlying skeleton structure rather than heuristically modifying task-space targets, this step significantly reduces inverse kinematics error and tuning effort. Second, we refine the retargeted trajectories through progressive kinodynamic trajectory optimization (TO), solved in three stages: kinematic TO, inverse dynamics, and full kinodynamic TO, each warm-started from the previous solution. The final result yields dynamically consistent state trajectories and joint torque profiles, providing high-quality references for learning-based controllers. Together, skeleton calibration and kinodynamic TO enable the generation of natural, physically consistent motion references across diverse humanoid platforms.
Reference-Steering via Data-Driven Predictive Control for Hyper-Accurate Robotic Flying-Hopping Locomotion
Nov 27, 2024State-of-the-art model-based control designs have been shown to be successful in realizing dynamic locomotion behaviors for robotic systems. The precision of the realized behaviors in terms of locomotion performance via fly, hopping, or walking has not yet been well investigated, despite the fact that the difference between the robot model and physical hardware is doomed to produce inaccurate trajectory tracking. To address this inaccuracy, we propose a referencing-steering method to bridge the model-to-real gap by establishing a data-driven input-output (DD-IO) model on top of the existing model-based design. The DD-IO model takes the reference tracking trajectories as the input and the realized tracking trajectory as the output. By utilizing data-driven predictive control, we steer the reference input trajectories online so that the realized output ones match the actual desired ones. We demonstrate our method on the robot PogoX to realize hyper-accurate hopping and flying behaviors in both simulation and hardware. This data-driven reference-steering approach is straightforward to apply to general robotic systems for performance improvement via hyper-accurate trajectory tracking.
Simultaneous Ground Reaction Force and State Estimation via Constrained Moving Horizon Estimation
Nov 18, 2024Accurate ground reaction force (GRF) estimation can significantly improve the adaptability of legged robots in various real-world applications. For instance, with estimated GRF and contact kinematics, the locomotion control and planning assist the robot in overcoming uncertain terrains. The canonical momentum-based methods, formulated as nonlinear observers, do not fully address the noisy measurements and the dependence between floating base states and the generalized momentum dynamics. In this paper, we present a simultaneous ground reaction force and state estimation framework for legged robots, which systematically addresses the sensor noise and the coupling between states and dynamics. With the floating base orientation estimated separately, a decentralized Moving Horizon Estimation (MHE) method is implemented to fuse the robot dynamics, proprioceptive sensors, exteroceptive sensors, and deterministic contact complementarity constraints in a convex windowed optimization. The proposed method is shown to be capable of providing accurate GRF and state estimation on several legged robots, including the open-source educational planar bipedal robot STRIDE and quadrupedal robot Unitree Go1, with a frequency of 200Hz and a past time window of 0.04s.
iWalker: Imperative Visual Planning for Walking Humanoid Robot
Sep 27, 2024



Humanoid robots, with the potential to perform a broad range of tasks in environments designed for humans, have been deemed crucial for the basis of general AI agents. When talking about planning and controlling, although traditional models and task-specific methods have been extensively studied over the past few decades, they are inadequate for achieving the flexibility and versatility needed for general autonomy. Learning approaches, especially reinforcement learning, are powerful and popular nowadays, but they are inherently "blind" during training, relying heavily on trials in simulation without proper guidance from physical principles or underlying dynamics. In response, we propose a novel end-to-end pipeline that seamlessly integrates perception, planning, and model-based control for humanoid robot walking. We refer to our method as iWalker, which is driven by imperative learning (IL), a self-supervising neuro-symbolic learning framework. This enables the robot to learn from arbitrary unlabeled data, significantly improving its adaptability and generalization capabilities. In experiments, iWalker demonstrates effectiveness in both simulated and real-world environments, representing a significant advancement toward versatile and autonomous humanoid robots.
STRIDE: An Open-Source, Low-Cost, and Versatile Bipedal Robot Platform for Research and Education
Jul 02, 2024In this paper, we present STRIDE, a Simple, Terrestrial, Reconfigurable, Intelligent, Dynamic, and Educational bipedal platform. STRIDE aims to propel bipedal robotics research and education by providing a cost-effective implementation with step-by-step instructions for building a bipedal robotic platform while providing flexible customizations via a modular and durable design. Moreover, a versatile terrain setup and a quantitative disturbance injection system are augmented to the robot platform to replicate natural terrains and push forces that can be used to evaluate legged locomotion in practical and adversarial scenarios. We demonstrate the functionalities of this platform by realizing an adaptive step-to-step dynamics based walking controller to achieve dynamic walking. Our work with the open-soured implementation shows that STRIDE is a highly versatile and durable platform that can be used in research and education to evaluate locomotion algorithms, mechanical designs, and robust and adaptative controls.
Fast Decentralized State Estimation for Legged Robot Locomotion via EKF and MHE
May 31, 2024In this paper, we present a fast and decentralized state estimation framework for the control of legged locomotion. The nonlinear estimation of the floating base states is decentralized to an orientation estimation via Extended Kalman Filter (EKF) and a linear velocity estimation via Moving Horizon Estimation (MHE). The EKF fuses the inertia sensor with vision to estimate the floating base orientation. The MHE uses the estimated orientation with all the sensors within a time window in the past to estimate the linear velocities based on a time-varying linear dynamics formulation of the interested states with state constraints. More importantly, a marginalization method based on the optimization structure of the full information filter (FIF) is proposed to convert the equality-constrained FIF to an equivalent MHE. This decoupling of state estimation promotes the desired balance of computation efficiency, accuracy of estimation, and the inclusion of state constraints. The proposed method is shown to be capable of providing accurate state estimation to several legged robots, including the highly dynamic hopping robot PogoX, the bipedal robot Cassie, and the quadrupedal robot Unitree Go1, with a frequency at 200 Hz and a window interval of 0.1s.
Data-Driven Predictive Control for Robust Exoskeleton Locomotion
Mar 23, 2024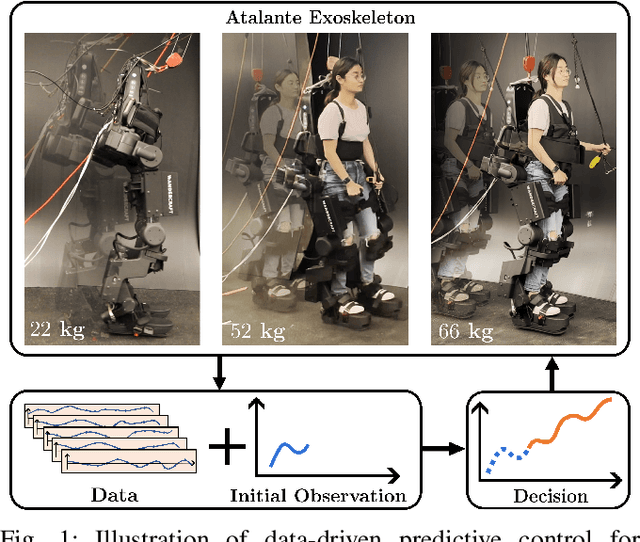
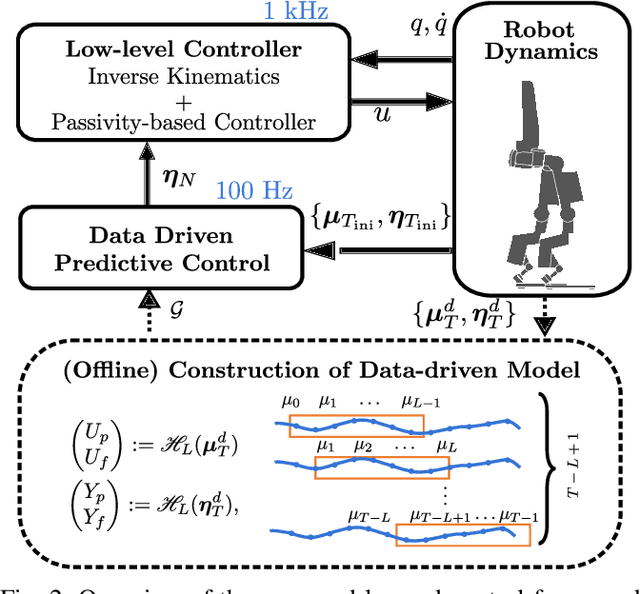
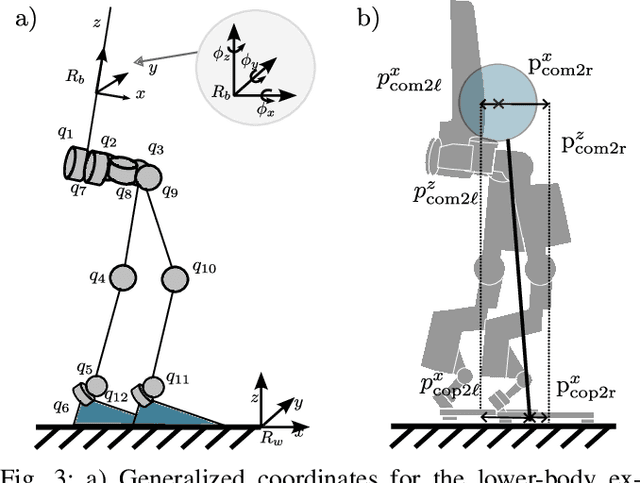
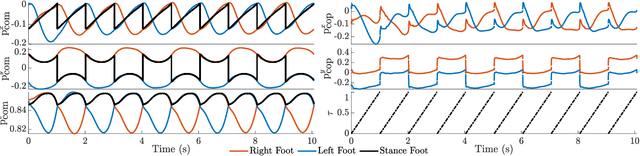
Exoskeleton locomotion must be robust while being adaptive to different users with and without payloads. To address these challenges, this work introduces a data-driven predictive control (DDPC) framework to synthesize walking gaits for lower-body exoskeletons, employing Hankel matrices and a state transition matrix for its data-driven model. The proposed approach leverages DDPC through a multi-layer architecture. At the top layer, DDPC serves as a planner employing Hankel matrices and a state transition matrix to generate a data-driven model that can learn and adapt to varying users and payloads. At the lower layer, our method incorporates inverse kinematics and passivity-based control to map the planned trajectory from DDPC into the full-order states of the lower-body exoskeleton. We validate the effectiveness of this approach through numerical simulations and hardware experiments conducted on the Atalante lower-body exoskeleton with different payloads. Moreover, we conducted a comparative analysis against the model predictive control (MPC) framework based on the reduced-order linear inverted pendulum (LIP) model. Through this comparison, the paper demonstrates that DDPC enables robust bipedal walking at various velocities while accounting for model uncertainties and unknown perturbations.
Explosive Legged Robotic Hopping: Energy Accumulation and Power Amplification via Pneumatic Augmentation
Dec 10, 2023We present a novel pneumatic augmentation to traditional electric motor-actuated legged robot to increase intermittent power density to perform infrequent explosive hopping behaviors. The pneumatic system is composed of a pneumatic pump, a tank, and a pneumatic actuator. The tank is charged up by the pump during regular hopping motion that is created by the electric motors. At any time after reaching a desired air pressure in the tank, a solenoid valve is utilized to rapidly release the air pressure to the pneumatic actuator (piston) which is used in conjunction with the electric motors to perform explosive hopping, increasing maximum hopping height for one or subsequent cycles. We show that, on a custom-designed one-legged hopping robot, without any additional power source and with this novel pneumatic augmentation system, their associated system identification and optimal control, the robot is able to realize highly explosive hopping with power amplification per cycle by a factor of approximately 5.4 times the power of electric motor actuation alone.