 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMTGR: Industrial-Scale Generative Recommendation Framework in Meituan
May 24, 2025



Scaling law has been extensively validated in many domains such as natural language processing and computer vision. In the recommendation system, recent work has adopted generative recommendations to achieve scalability, but their generative approaches require abandoning the carefully constructed cross features of traditional recommendation models. We found that this approach significantly degrades model performance, and scaling up cannot compensate for it at all. In this paper, we propose MTGR (Meituan Generative Recommendation) to address this issue. MTGR is modeling based on the HSTU architecture and can retain the original deep learning recommendation model (DLRM) features, including cross features. Additionally, MTGR achieves training and inference acceleration through user-level compression to ensure efficient scaling. We also propose Group-Layer Normalization (GLN) to enhance the performance of encoding within different semantic spaces and the dynamic masking strategy to avoid information leakage. We further optimize the training frameworks, enabling support for our models with 10 to 100 times computational complexity compared to the DLRM, without significant cost increases. MTGR achieved 65x FLOPs for single-sample forward inference compared to the DLRM model, resulting in the largest gain in nearly two years both offline and online. This breakthrough was successfully deployed on Meituan, the world's largest food delivery platform, where it has been handling the main traffic.
Towards Secure Program Partitioning for Smart Contracts with LLM's In-Context Learning
Feb 20, 2025



Smart contracts are highly susceptible to manipulation attacks due to the leakage of sensitive information. Addressing manipulation vulnerabilities is particularly challenging because they stem from inherent data confidentiality issues rather than straightforward implementation bugs. To tackle this by preventing sensitive information leakage, we present PartitionGPT, the first LLM-driven approach that combines static analysis with the in-context learning capabilities of large language models (LLMs) to partition smart contracts into privileged and normal codebases, guided by a few annotated sensitive data variables. We evaluated PartitionGPT on 18 annotated smart contracts containing 99 sensitive functions. The results demonstrate that PartitionGPT successfully generates compilable, and verified partitions for 78% of the sensitive functions while reducing approximately 30% code compared to function-level partitioning approach. Furthermore, we evaluated PartitionGPT on nine real-world manipulation attacks that lead to a total loss of 25 million dollars, PartitionGPT effectively prevents eight cases, highlighting its potential for broad applicability and the necessity for secure program partitioning during smart contract development to diminish manipulation vulnerabilities.
Adaptive Utilization of Cross-scenario Information for Multi-scenario Recommendation
Jul 29, 2024



Recommender system of the e-commerce platform usually serves multiple business scenarios. Multi-scenario Recommendation (MSR) is an important topic that improves ranking performance by leveraging information from different scenarios. Recent methods for MSR mostly construct scenario shared or specific modules to model commonalities and differences among scenarios. However, when the amount of data among scenarios is skewed or data in some scenarios is extremely sparse, it is difficult to learn scenario-specific parameters well. Besides, simple sharing of information from other scenarios may result in a negative transfer. In this paper, we propose a unified model named Cross-Scenario Information Interaction (CSII) to serve all scenarios by a mixture of scenario-dominated experts. Specifically, we propose a novel method to select highly transferable features in data instances. Then, we propose an attention-based aggregator module, which can adaptively extract relative knowledge from cross-scenario. Experiments on the production dataset verify the superiority of our method. Online A/B test in Meituan Waimai APP also shows a significant performance gain, leading to an average improvement in GMV (Gross Merchandise Value) of 1.0% for overall scenarios.
Enhancing CTR Prediction through Sequential Recommendation Pre-training: Introducing the SRP4CTR Framework
Jul 29, 2024



Understanding user interests is crucial for Click-Through Rate (CTR) prediction tasks. In sequential recommendation, pre-training from user historical behaviors through self-supervised learning can better comprehend user dynamic preferences, presenting the potential for direct integration with CTR tasks. Previous methods have integrated pre-trained models into downstream tasks with the sole purpose of extracting semantic information or well-represented user features, which are then incorporated as new features. However, these approaches tend to ignore the additional inference costs to the downstream tasks, and they do not consider how to transfer the effective information from the pre-trained models for specific estimated items in CTR prediction. In this paper, we propose a Sequential Recommendation Pre-training framework for CTR prediction (SRP4CTR) to tackle the above problems. Initially, we discuss the impact of introducing pre-trained models on inference costs. Subsequently, we introduced a pre-trained method to encode sequence side information concurrently.During the fine-tuning process, we incorporate a cross-attention block to establish a bridge between estimated items and the pre-trained model at a low cost. Moreover, we develop a querying transformer technique to facilitate the knowledge transfer from the pre-trained model to industrial CTR models. Offline and online experiments show that our method outperforms previous baseline models.
Aligning Explanations for Recommendation with Rating and Feature via Maximizing Mutual Information
Jul 18, 2024



Providing natural language-based explanations to justify recommendations helps to improve users' satisfaction and gain users' trust. However, as current explanation generation methods are commonly trained with an objective to mimic existing user reviews, the generated explanations are often not aligned with the predicted ratings or some important features of the recommended items, and thus, are suboptimal in helping users make informed decision on the recommendation platform. To tackle this problem, we propose a flexible model-agnostic method named MMI (Maximizing Mutual Information) framework to enhance the alignment between the generated natural language explanations and the predicted rating/important item features. Specifically, we propose to use mutual information (MI) as a measure for the alignment and train a neural MI estimator. Then, we treat a well-trained explanation generation model as the backbone model and further fine-tune it through reinforcement learning with guidance from the MI estimator, which rewards a generated explanation that is more aligned with the predicted rating or a pre-defined feature of the recommended item. Experiments on three datasets demonstrate that our MMI framework can boost different backbone models, enabling them to outperform existing baselines in terms of alignment with predicted ratings and item features. Additionally, user studies verify that MI-enhanced explanations indeed facilitate users' decisions and are favorable compared with other baselines due to their better alignment properties.
Unified Dual-Intent Translation for Joint Modeling of Search and Recommendation
Jul 01, 2024



Recommendation systems, which assist users in discovering their preferred items among numerous options, have served billions of users across various online platforms. Intuitively, users' interactions with items are highly driven by their unchanging inherent intents (e.g., always preferring high-quality items) and changing demand intents (e.g., wanting a T-shirt in summer but a down jacket in winter). However, both types of intents are implicitly expressed in recommendation scenario, posing challenges in leveraging them for accurate intent-aware recommendations. Fortunately, in search scenario, often found alongside recommendation on the same online platform, users express their demand intents explicitly through their query words. Intuitively, in both scenarios, a user shares the same inherent intent and the interactions may be influenced by the same demand intent. It is therefore feasible to utilize the interaction data from both scenarios to reinforce the dual intents for joint intent-aware modeling. But the joint modeling should deal with two problems: 1) accurately modeling users' implicit demand intents in recommendation; 2) modeling the relation between the dual intents and the interactive items. To address these problems, we propose a novel model named Unified Dual-Intents Translation for joint modeling of Search and Recommendation (UDITSR). To accurately simulate users' demand intents in recommendation, we utilize real queries from search data as supervision information to guide its generation. To explicitly model the relation among the triplet <inherent intent, demand intent, interactive item>, we propose a dual-intent translation propagation mechanism to learn the triplet in the same semantic space via embedding translations. Extensive experiments demonstrate that UDITSR outperforms SOTA baselines both in search and recommendation tasks.
Modeling Dual Period-Varying Preferences for Takeaway Recommendation
Jun 16, 2023



Takeaway recommender systems, which aim to accurately provide stores that offer foods meeting users' interests, have served billions of users in our daily life. Different from traditional recommendation, takeaway recommendation faces two main challenges: (1) Dual Interaction-Aware Preference Modeling. Traditional recommendation commonly focuses on users' single preferences for items while takeaway recommendation needs to comprehensively consider users' dual preferences for stores and foods. (2) Period-Varying Preference Modeling. Conventional recommendation generally models continuous changes in users' preferences from a session-level or day-level perspective. However, in practical takeaway systems, users' preferences vary significantly during the morning, noon, night, and late night periods of the day. To address these challenges, we propose a Dual Period-Varying Preference modeling (DPVP) for takeaway recommendation. Specifically, we design a dual interaction-aware module, aiming to capture users' dual preferences based on their interactions with stores and foods. Moreover, to model various preferences in different time periods of the day, we propose a time-based decomposition module as well as a time-aware gating mechanism. Extensive offline and online experiments demonstrate that our model outperforms state-of-the-art methods on real-world datasets and it is capable of modeling the dual period-varying preferences. Moreover, our model has been deployed online on Meituan Takeaway platform, leading to an average improvement in GMV (Gross Merchandise Value) of 0.70%.
Control Parameters Considered Harmful: Detecting Range Specification Bugs in Drone Configuration Modules via Learning-Guided Search
Dec 07, 2021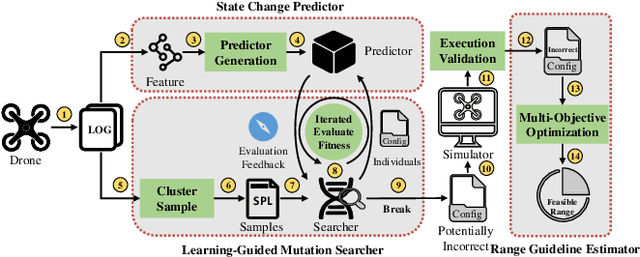
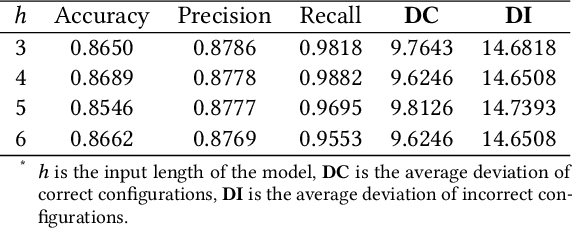
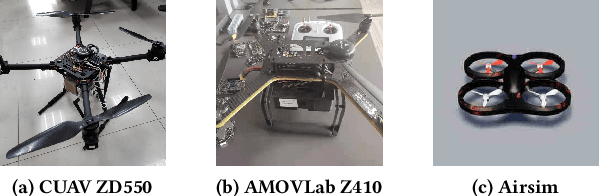
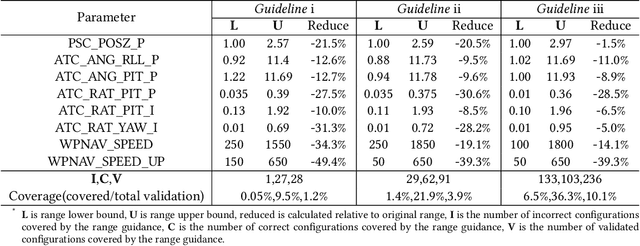
In order to support a variety of missions and deal with different flight environments, drone control programs typically provide configurable control parameters. However, such a flexibility introduces vulnerabilities. One such vulnerability, referred to as range specification bugs, has been recently identified. The vulnerability originates from the fact that even though each individual parameter receives a value in the recommended value range, certain combinations of parameter values may affect the drone physical stability. In this paper we develop a novel learning-guided search system to find such combinations, that we refer to as incorrect configurations. Our system applies metaheuristic search algorithms mutating configurations to detect the configuration parameters that have values driving the drone to unstable physical states. To guide the mutations, our system leverages a machine learning predictor as the fitness evaluator. Finally, by utilizing multi-objective optimization, our system returns the feasible ranges based on the mutation search results. Because in our system the mutations are guided by a predictor, evaluating the parameter configurations does not require realistic/simulation executions. Therefore, our system supports a comprehensive and yet efficient detection of incorrect configurations. We have carried out an experimental evaluation of our system. The evaluation results show that the system successfully reports potentially incorrect configurations, of which over 85% lead to actual unstable physical states.