 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCREBench: Evaluating Large Language Models in Cryptographic Binary Reverse Engineering
Apr 04, 2026Reverse engineering (RE) is central to software security, particularly for cryptographic programs that handle sensitive data and are highly prone to vulnerabilities. It supports critical tasks such as vulnerability discovery and malware analysis. Despite its importance, RE remains labor-intensive and requires substantial expertise, making large language models (LLMs) a potential solution for automating the process. However, their capabilities for RE remain systematically underexplored. To address this gap, we study the cryptographic binary RE capabilities of LLMs and introduce \textbf{CREBench}, a benchmark comprising 432 challenges built from 48 standard cryptographic algorithms, 3 insecure crypto key usage scenarios, and 3 difficulty levels. Each challenge follows a Capture-the-Flag (CTF) RE challenge, requiring the model to analyze the underlying cryptographic logic and recover the correct input. We design an evaluation framework comprising four sub-tasks, from algorithm identification to correct flag recovery. We evaluate eight frontier LLMs on CREBench. GPT-5.4, the best-performing model, achieves 64.03 out of 100 and recovers the flag in 59\% of challenges. We also establish a strong human expert baseline of 92.19 points, showing that humans maintain an advantage in cryptographic RE tasks. Our code and dataset are available at https://github.com/wangyu-ovo/CREBench.
Control Parameters Considered Harmful: Detecting Range Specification Bugs in Drone Configuration Modules via Learning-Guided Search
Dec 07, 2021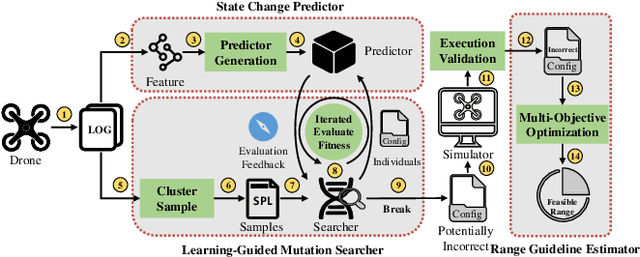
In order to support a variety of missions and deal with different flight environments, drone control programs typically provide configurable control parameters. However, such a flexibility introduces vulnerabilities. One such vulnerability, referred to as range specification bugs, has been recently identified. The vulnerability originates from the fact that even though each individual parameter receives a value in the recommended value range, certain combinations of parameter values may affect the drone physical stability. In this paper we develop a novel learning-guided search system to find such combinations, that we refer to as incorrect configurations. Our system applies metaheuristic search algorithms mutating configurations to detect the configuration parameters that have values driving the drone to unstable physical states. To guide the mutations, our system leverages a machine learning predictor as the fitness evaluator. Finally, by utilizing multi-objective optimization, our system returns the feasible ranges based on the mutation search results. Because in our system the mutations are guided by a predictor, evaluating the parameter configurations does not require realistic/simulation executions. Therefore, our system supports a comprehensive and yet efficient detection of incorrect configurations. We have carried out an experimental evaluation of our system. The evaluation results show that the system successfully reports potentially incorrect configurations, of which over 85% lead to actual unstable physical states.