 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFAR-AVIO: Fast and Robust Schur-Complement Based Acoustic-Visual-Inertial Fusion Odometry with Sensor Calibration
Dec 23, 2025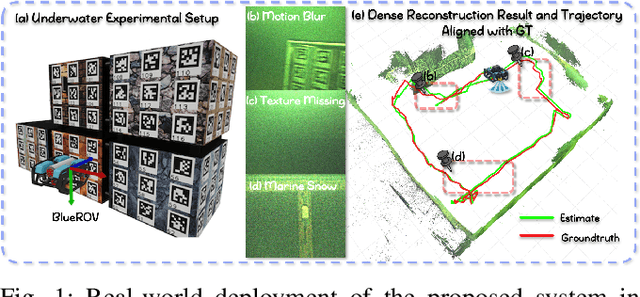
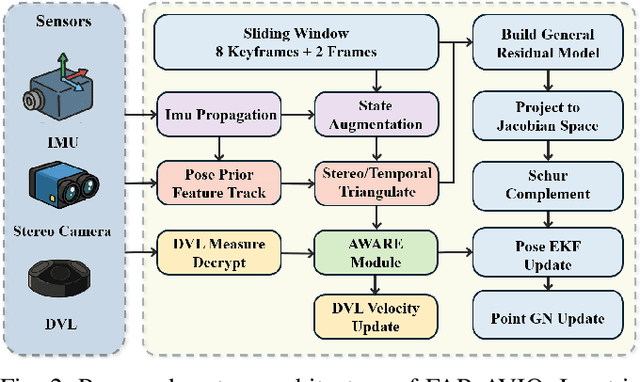
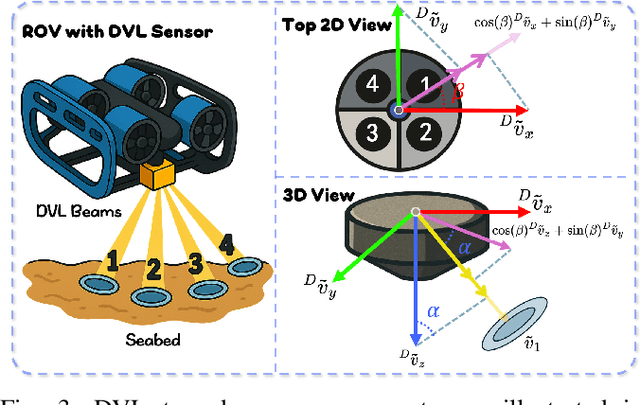
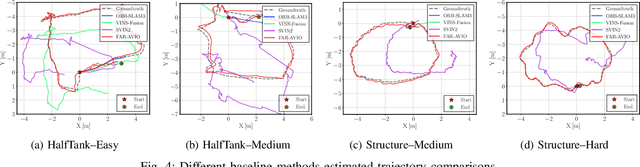
Underwater environments impose severe challenges to visual-inertial odometry systems, as strong light attenuation, marine snow and turbidity, together with weakly exciting motions, degrade inertial observability and cause frequent tracking failures over long-term operation. While tightly coupled acoustic-visual-inertial fusion, typically implemented through an acoustic Doppler Velocity Log (DVL) integrated with visual-inertial measurements, can provide accurate state estimation, the associated graph-based optimization is often computationally prohibitive for real-time deployment on resource-constrained platforms. Here we present FAR-AVIO, a Schur-Complement based, tightly coupled acoustic-visual-inertial odometry framework tailored for underwater robots. FAR-AVIO embeds a Schur complement formulation into an Extended Kalman Filter(EKF), enabling joint pose-landmark optimization for accuracy while maintaining constant-time updates by efficiently marginalizing landmark states. On top of this backbone, we introduce Adaptive Weight Adjustment and Reliability Evaluation(AWARE), an online sensor health module that continuously assesses the reliability of visual, inertial and DVL measurements and adaptively regulates their sigma weights, and we develop an efficient online calibration scheme that jointly estimates DVL-IMU extrinsics, without dedicated calibration manoeuvres. Numerical simulations and real-world underwater experiments consistently show that FAR-AVIO outperforms state-of-the-art underwater SLAM baselines in both localization accuracy and computational efficiency, enabling robust operation on low-power embedded platforms. Our implementation has been released as open source software at https://far-vido.gitbook.io/far-vido-docs.
LEMON-Mapping: Loop-Enhanced Large-Scale Multi-Session Point Cloud Merging and Optimization for Globally Consistent Mapping
May 15, 2025With the rapid development of robotics, multi-robot collaboration has become critical and challenging. One key problem is integrating data from multiple robots to build a globally consistent and accurate map for robust cooperation and precise localization. While traditional multi-robot pose graph optimization (PGO) maintains basic global consistency, it focuses primarily on pose optimization and ignores the geometric structure of the map. Moreover, PGO only uses loop closure as a constraint between two nodes, failing to fully exploit its capability to maintaining local consistency of multi-robot maps. Therefore, PGO-based multi-robot mapping methods often suffer from serious map divergence and blur, especially in regions with overlapping submaps. To address this issue, we propose Lemon-Mapping, a loop-enhanced framework for large-scale multi-session point cloud map fusion and optimization, which reasonably utilizes loop closure and improves the geometric quality of the map. We re-examine the role of loops for multi-robot mapping and introduce three key innovations. First, we develop a robust loop processing mechanism that effectively rejects outliers and a novel loop recall strategy to recover mistakenly removed loops. Second, we introduce a spatial bundle adjustment method for multi-robot maps that significantly reduces the divergence in overlapping regions and eliminates map blur. Third, we design a PGO strategy that leverages the refined constraints of bundle adjustment to extend the local accuracy to the global map. We validate our framework on several public datasets and a self-collected dataset. Experimental results demonstrate that our method outperforms traditional map merging approaches in terms of mapping accuracy and reduction of map divergence. Scalability experiments also demonstrate the strong capability of our framework to handle scenarios involving numerous robots.
Tracailer: An Efficient Trajectory Planner for Tractor-Trailer Vehicles in Unstructured Environments
Feb 27, 2025The tractor-trailer vehicle (robot) consists of a drivable tractor and one or more non-drivable trailers connected via hitches. Compared to typical car-like robots, the addition of trailers provides greater transportation capability. However, this also complicates motion planning due to the robot's complex kinematics, high-dimensional state space, and deformable structure. To efficiently plan safe, time-optimal trajectories that adhere to the kinematic constraints of the robot and address the challenges posed by its unique features, this paper introduces a lightweight, compact, and high-order smooth trajectory representation for tractor-trailer robots. Based on it, we design an efficiently solvable spatio-temporal trajectory optimization problem. To deal with deformable structures, which leads to difficulties in collision avoidance, we fully leverage the collision-free regions of the environment, directly applying deformations to trajectories in continuous space. This approach not requires constructing safe regions from the environment using convex approximations through collision-free seed points before each optimization, avoiding the loss of the solution space, thus reducing the dependency of the optimization on initial values. Moreover, a multi-terminal fast path search algorithm is proposed to generate the initial values for optimization. Extensive simulation experiments demonstrate that our approach achieves several-fold improvements in efficiency compared to existing algorithms, while also ensuring lower curvature and trajectory duration. Real-world experiments involving the transportation, loading and unloading of goods in both indoor and outdoor scenarios further validate the effectiveness of our method. The source code is accessible at https://github.com/ZJU-FAST-Lab/tracailer/.
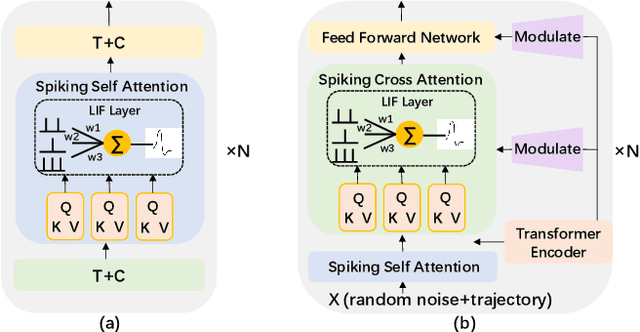
MTDP: Modulated Transformer Diffusion Policy Model
Feb 13, 2025



Recent research on robot manipulation based on Behavior Cloning (BC) has made significant progress. By combining diffusion models with BC, diffusion policiy has been proposed, enabling robots to quickly learn manipulation tasks with high success rates. However, integrating diffusion policy with high-capacity Transformer presents challenges, traditional Transformer architectures struggle to effectively integrate guiding conditions, resulting in poor performance in manipulation tasks when using Transformer-based models. In this paper, we investigate key architectural designs of Transformers and improve the traditional Transformer architecture by proposing the Modulated Transformer Diffusion Policy (MTDP) model for diffusion policy. The core of this model is the Modulated Attention module we proposed, which more effectively integrates the guiding conditions with the main input, improving the generative model's output quality and, consequently, increasing the robot's task success rate. In six experimental tasks, MTDP outperformed existing Transformer model architectures, particularly in the Toolhang experiment, where the success rate increased by 12\%. To verify the generality of Modulated Attention, we applied it to the UNet architecture to construct Modulated UNet Diffusion Policy model (MUDP), which also achieved higher success rates than existing UNet architectures across all six experiments. The Diffusion Policy uses Denoising Diffusion Probabilistic Models (DDPM) as the diffusion model. Building on this, we also explored Denoising Diffusion Implicit Models (DDIM) as the diffusion model, constructing the MTDP-I and MUDP-I model, which nearly doubled the generation speed while maintaining performance.
Contact-Aware Motion Planning Among Movable Objects
Feb 05, 2025Most existing methods for motion planning of mobile robots involve generating collision-free trajectories. However, these methods focusing solely on contact avoidance may limit the robots' locomotion and can not be applied to tasks where contact is inevitable or intentional. To address these issues, we propose a novel contact-aware motion planning (CAMP) paradigm for robotic systems. Our approach incorporates contact between robots and movable objects as complementarity constraints in optimization-based trajectory planning. By leveraging augmented Lagrangian methods (ALMs), we efficiently solve the optimization problem with complementarity constraints, producing spatial-temporal optimal trajectories of the robots. Simulations demonstrate that, compared to the state-of-the-art method, our proposed CAMP method expands the reachable space of mobile robots, resulting in a significant improvement in the success rate of two types of fundamental tasks: navigation among movable objects (NAMO) and rearrangement of movable objects (RAMO). Real-world experiments show that the trajectories generated by our proposed method are feasible and quickly deployed in different tasks.
Brain-inspired Action Generation with Spiking Transformer Diffusion Policy Model
Nov 15, 2024


Spiking Neural Networks (SNNs) has the ability to extract spatio-temporal features due to their spiking sequence. While previous research has primarily foucus on the classification of image and reinforcement learning. In our paper, we put forward novel diffusion policy model based on Spiking Transformer Neural Networks and Denoising Diffusion Probabilistic Model (DDPM): Spiking Transformer Modulate Diffusion Policy Model (STMDP), a new brain-inspired model for generating robot action trajectories. In order to improve the performance of this model, we develop a novel decoder module: Spiking Modulate De coder (SMD), which replaces the traditional Decoder module within the Transformer architecture. Additionally, we explored the substitution of DDPM with Denoising Diffusion Implicit Models (DDIM) in our frame work. We conducted experiments across four robotic manipulation tasks and performed ablation studies on the modulate block. Our model consistently outperforms existing Transformer-based diffusion policy method. Especially in Can task, we achieved an improvement of 8%. The proposed STMDP method integrates SNNs, dffusion model and Transformer architecture, which offers new perspectives and promising directions for exploration in brain-inspired robotics.
LF-3PM: a LiDAR-based Framework for Perception-aware Planning with Perturbation-induced Metric
Aug 03, 2024



Just as humans can become disoriented in featureless deserts or thick fogs, not all environments are conducive to the Localization Accuracy and Stability (LAS) of autonomous robots. This paper introduces an efficient framework designed to enhance LiDAR-based LAS through strategic trajectory generation, known as Perception-aware Planning. Unlike vision-based frameworks, the LiDAR-based requires different considerations due to unique sensor attributes. Our approach focuses on two main aspects: firstly, assessing the impact of LiDAR observations on LAS. We introduce a perturbation-induced metric to provide a comprehensive and reliable evaluation of LiDAR observations. Secondly, we aim to improve motion planning efficiency. By creating a Static Observation Loss Map (SOLM) as an intermediary, we logically separate the time-intensive evaluation and motion planning phases, significantly boosting the planning process. In the experimental section, we demonstrate the effectiveness of the proposed metrics across various scenes and the feature of trajectories guided by different metrics. Ultimately, our framework is tested in a real-world scenario, enabling the robot to actively choose topologies and orientations preferable for localization. The source code is accessible at https://github.com/ZJU-FAST-Lab/LF-3PM.
Scalable Distance-based Multi-Agent Relative State Estimation via Block Multiconvex Optimization
May 31, 2024



This paper explores the distance-based relative state estimation problem in large-scale systems, which is hard to solve effectively due to its high-dimensionality and non-convexity. In this paper, we alleviate this inherent hardness to simultaneously achieve scalability and robustness of inference on this problem. Our idea is launched from a universal geometric formulation, called \emph{generalized graph realization}, for the distance-based relative state estimation problem. Based on this formulation, we introduce two collaborative optimization models, one of which is convex and thus globally solvable, and the other enables fast searching on non-convex landscapes to refine the solution offered by the convex one. Importantly, both models enjoy \emph{multiconvex} and \emph{decomposable} structures, allowing efficient and safe solutions using \emph{block coordinate descent} that enjoys scalability and a distributed nature. The proposed algorithms collaborate to demonstrate superior or comparable solution precision to the current centralized convex relaxation-based methods, which are known for their high optimality. Distinctly, the proposed methods demonstrate scalability beyond the reach of previous convex relaxation-based methods. We also demonstrate that the combination of the two proposed algorithms achieves a more robust pipeline than deploying the local search method alone in a continuous-time scenario.
Fast Iterative Region Inflation for Computing Large 2-D/3-D Convex Regions of Obstacle-Free Space
Mar 05, 20241) Restrictive Inflation is designed to ensure the managibility of the generated convex polytope. Based on its characteristic of few variables but rich constraints, an efficient and numerically stable solver is designed. 2) A novel method that formulates the MVIE problem into SOCP formulation is proposed, which avoids directly confronting the positive definite constraints and improves the computational efficiency. 3) Especially for 2-D MVIE, a linear-time exact algorithm is introduced for the first time, filling a gap that existed for several decades and further enabling ultra-fast computational performance. 4) Building upon the above methods, a reliable convex polytope generation algorithm FIRI is proposed. Extensive experiments verify its superior comprehensive performance in terms of quality, efficiency, and managibility. High-performance implementation of FIRI will be open-sourced for the reference of the community.
Adaptive Tracking and Perching for Quadrotor in Dynamic Scenarios
Dec 19, 2023



Perching on the moving platforms is a promising solution to enhance the endurance and operational range of quadrotors, which could benefit the efficiency of a variety of air-ground cooperative tasks. To ensure robust perching, tracking with a steady relative state and reliable perception is a prerequisite. This paper presents an adaptive dynamic tracking and perching scheme for autonomous quadrotors to achieve tight integration with moving platforms. For reliable perception of dynamic targets, we introduce elastic visibility-aware planning to actively avoid occlusion and target loss. Additionally, we propose a flexible terminal adjustment method that adapts the changes in flight duration and the coupled terminal states, ensuring full-state synchronization with the time-varying perching surface at various angles. A relaxation strategy is developed by optimizing the tangential relative speed to address the dynamics and safety violations brought by hard boundary conditions. Moreover, we take SE(3) motion planning into account to ensure no collision between the quadrotor and the platform until the contact moment. Furthermore, we propose an efficient spatiotemporal trajectory optimization framework considering full state dynamics for tracking and perching. The proposed method is extensively tested through benchmark comparisons and ablation studies. To facilitate the application of academic research to industry and to validate the efficiency of our scheme under strictly limited computational resources, we deploy our system on a commercial drone (DJI-MAVIC3) with a full-size sport-utility vehicle (SUV). We conduct extensive real-world experiments, where the drone successfully tracks and perches at 30~km/h (8.3~m/s) on the top of the SUV, and at 3.5~m/s with 60{\deg} inclined into the trunk of the SUV.