 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGround-Effect-Aware Modeling and Control for Multicopters
Jun 24, 2025The ground effect on multicopters introduces several challenges, such as control errors caused by additional lift, oscillations that may occur during near-ground flight due to external torques, and the influence of ground airflow on models such as the rotor drag and the mixing matrix. This article collects and analyzes the dynamics data of near-ground multicopter flight through various methods, including force measurement platforms and real-world flights. For the first time, we summarize the mathematical model of the external torque of multicopters under ground effect. The influence of ground airflow on rotor drag and the mixing matrix is also verified through adequate experimentation and analysis. Through simplification and derivation, the differential flatness of the multicopter's dynamic model under ground effect is confirmed. To mitigate the influence of these disturbance models on control, we propose a control method that combines dynamic inverse and disturbance models, ensuring consistent control effectiveness at both high and low altitudes. In this method, the additional thrust and variations in rotor drag under ground effect are both considered and compensated through feedforward models. The leveling torque of ground effect can be equivalently represented as variations in the center of gravity and the moment of inertia. In this way, the leveling torque does not explicitly appear in the dynamic model. The final experimental results show that the method proposed in this paper reduces the control error (RMSE) by \textbf{45.3\%}. Please check the supplementary material at: https://github.com/ZJU-FAST-Lab/Ground-effect-controller.
Primitive-Planner: An Ultra Lightweight Quadrotor Planner with Time-optimal Primitives
Feb 24, 2025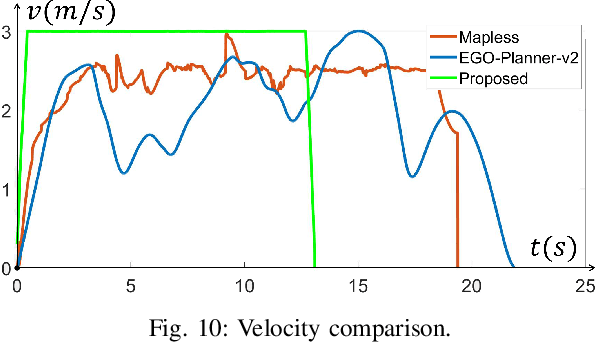
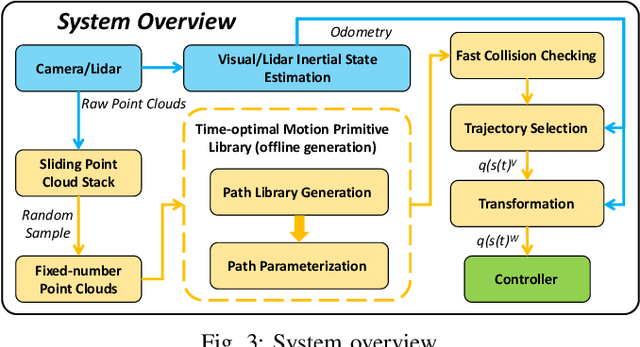
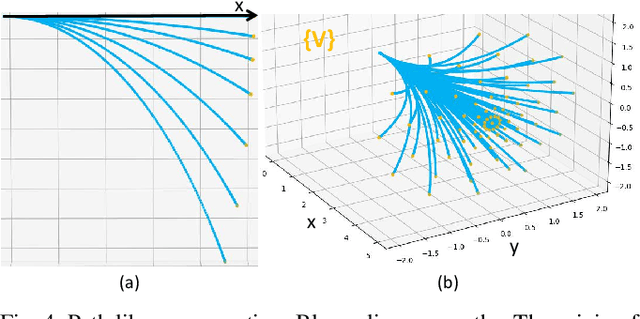
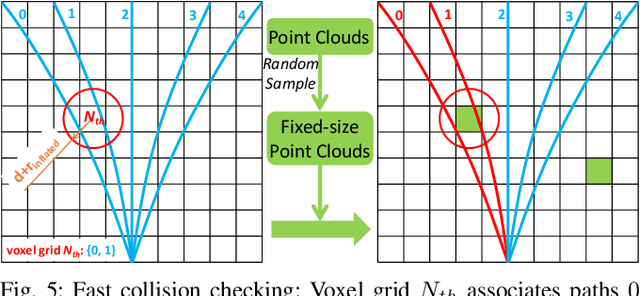
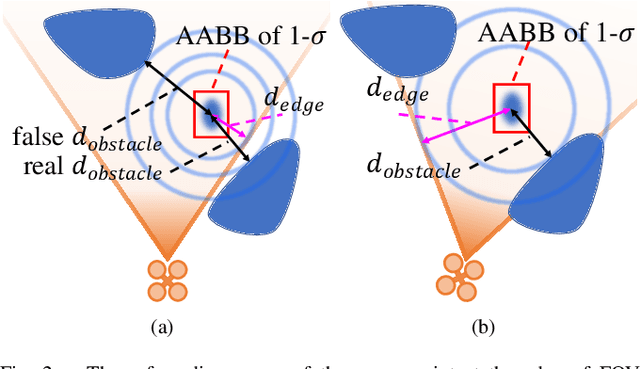
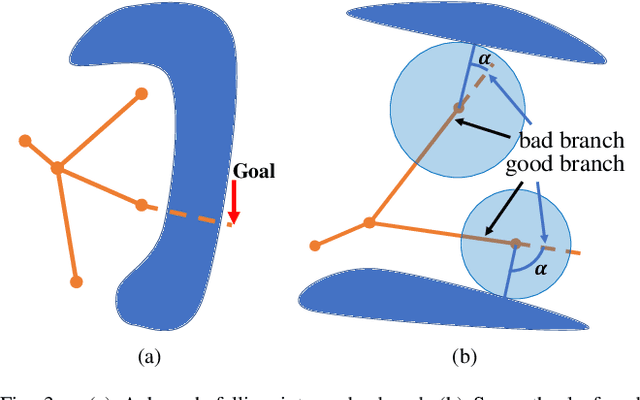
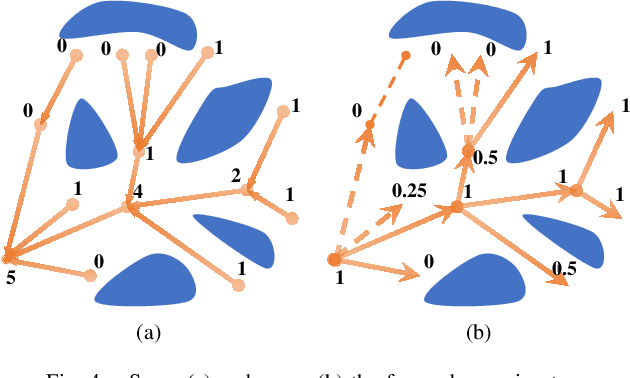
It is a significant requirement for a quadrotor trajectory planner to simultaneously guarantee trajectory quality and system lightweight. Many researchers focus on this problem, but there's still a gap between their performance and our common wish. In this paper, we propose an ultra lightweight quadrotor planner with time-optimal primitives. Firstly, a novel motion primitive library is proposed to generate time-optimal and dynamical feasible trajectories offline. Secondly, we propose a fast collision checking method with a deterministic time consumption, independent of the sampling resolution of the primitives. Finally, we select the minimum cost trajectory to execute among the safe primitives based on user-defined requirements. The propsed transformation relation between the local trajectories ensures the smoothness of the global trajectory. The planner reduces unnecessary online computing power consumption as much as possible, while ensuring a high-quality trajectory. Benchmark comparisons show that our method can generate the shortest flight time and distance of trajectory with the lowest computation overload. Challenging real-world experiments validate the robustness of our method.
Adaptive Tracking and Perching for Quadrotor in Dynamic Scenarios
Dec 19, 2023



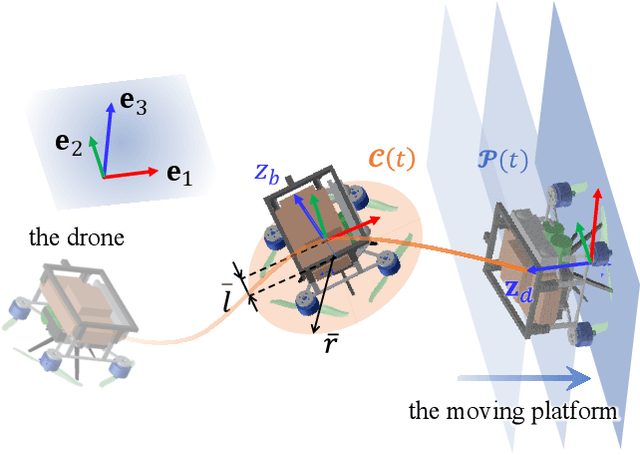
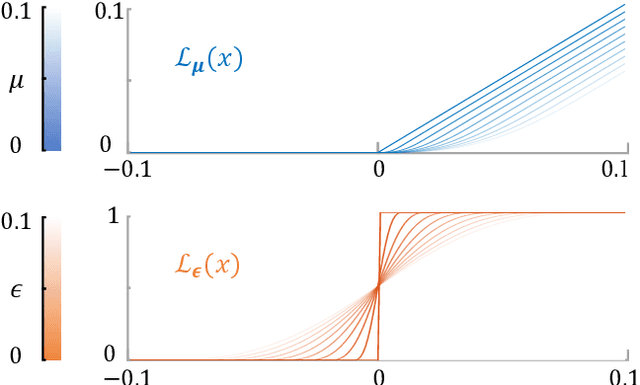
Perching on the moving platforms is a promising solution to enhance the endurance and operational range of quadrotors, which could benefit the efficiency of a variety of air-ground cooperative tasks. To ensure robust perching, tracking with a steady relative state and reliable perception is a prerequisite. This paper presents an adaptive dynamic tracking and perching scheme for autonomous quadrotors to achieve tight integration with moving platforms. For reliable perception of dynamic targets, we introduce elastic visibility-aware planning to actively avoid occlusion and target loss. Additionally, we propose a flexible terminal adjustment method that adapts the changes in flight duration and the coupled terminal states, ensuring full-state synchronization with the time-varying perching surface at various angles. A relaxation strategy is developed by optimizing the tangential relative speed to address the dynamics and safety violations brought by hard boundary conditions. Moreover, we take SE(3) motion planning into account to ensure no collision between the quadrotor and the platform until the contact moment. Furthermore, we propose an efficient spatiotemporal trajectory optimization framework considering full state dynamics for tracking and perching. The proposed method is extensively tested through benchmark comparisons and ablation studies. To facilitate the application of academic research to industry and to validate the efficiency of our scheme under strictly limited computational resources, we deploy our system on a commercial drone (DJI-MAVIC3) with a full-size sport-utility vehicle (SUV). We conduct extensive real-world experiments, where the drone successfully tracks and perches at 30~km/h (8.3~m/s) on the top of the SUV, and at 3.5~m/s with 60{\deg} inclined into the trunk of the SUV.
Catch Planner: Catching High-Speed Targets in the Flight
Feb 09, 2023



Catching high-speed targets in the flight is a complex and typical highly dynamic task. In this paper, we propose Catch Planner, a planning-with-decision scheme for catching. For sequential decision making, we propose a policy search method based on deep reinforcement learning. In order to make catching adaptive and flexible, we propose a trajectory optimization method to jointly optimize the highly coupled catching time and terminal state while considering the dynamic feasibility and safety. We also propose a flexible constraint transcription method to catch targets at any reasonable attitude and terminal position bias. The proposed Catch Planner provides a new paradigm for the combination of learning and planning and is integrated on the quadrotor designed by ourselves, which runs at 100$hz$ on the onboard computer. Extensive experiments are carried out in real and simulated scenes to verify the robustness of the proposed method and its expansibility when facing a variety of high-speed flying targets.
Real-Time Trajectory Planning for Aerial Perching
Mar 02, 2022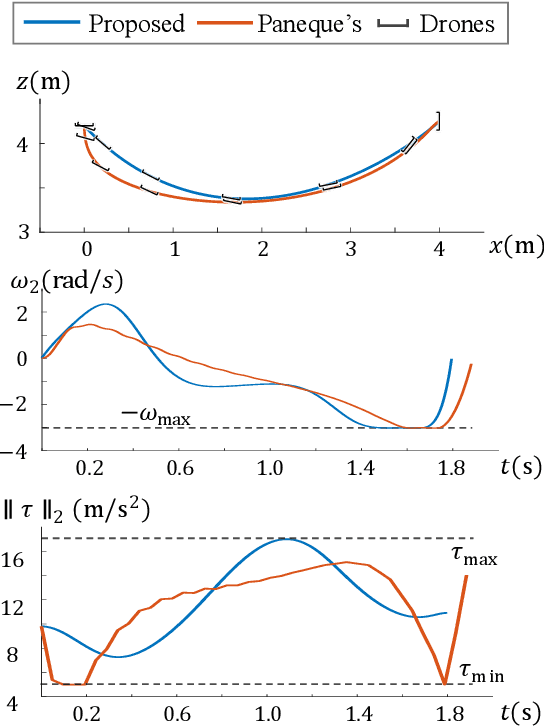

This paper presents a novel trajectory planning method for aerial perching. Compared with the existing work, the terminal states and the trajectory durations can be adjusted adaptively, instead of being determined in advance. Furthermore, our planner is able to minimize the tangential relative speed on the premise of safety and dynamic feasibility. This feature is especially notable on micro aerial robots with low maneuverability or scenarios where the space is not enough. Moreover, we design a flexible transformation strategy to eliminate terminal constraints along with reducing optimization variables. Besides, we take precise SE(3) motion planning into account to ensure that the drone would not touch the landing platform until the last moment. The proposed method is validated onboard by a palm-sized micro aerial robot with quite limited thrust and moment (thrust-to-weight ratio 1.7) perching on a mobile inclined surface. Sufficient experimental results show that our planner generates an optimal trajectory within 20ms, and replans with warm start in 2ms.
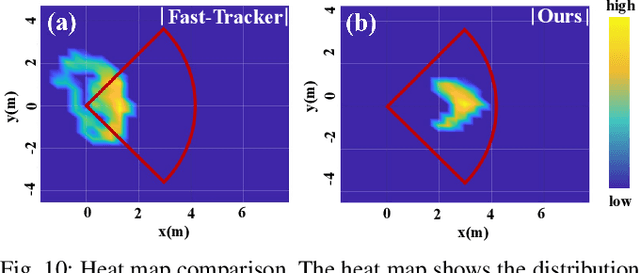
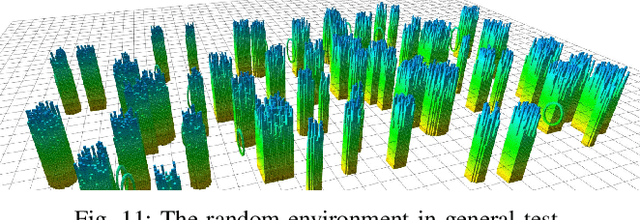
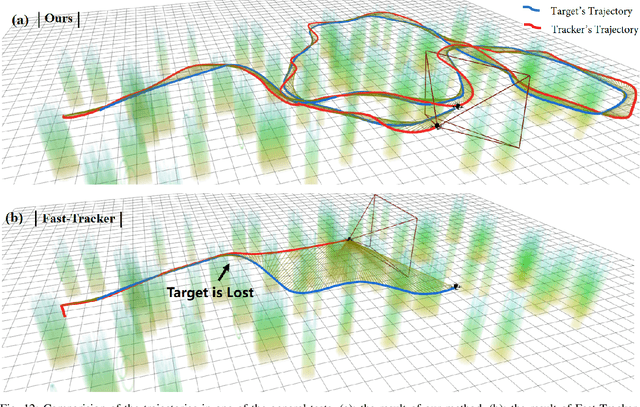
Elastic Tracker: A Spatio-temporal Trajectory Planner Flexible Aerial Tracking
Sep 15, 2021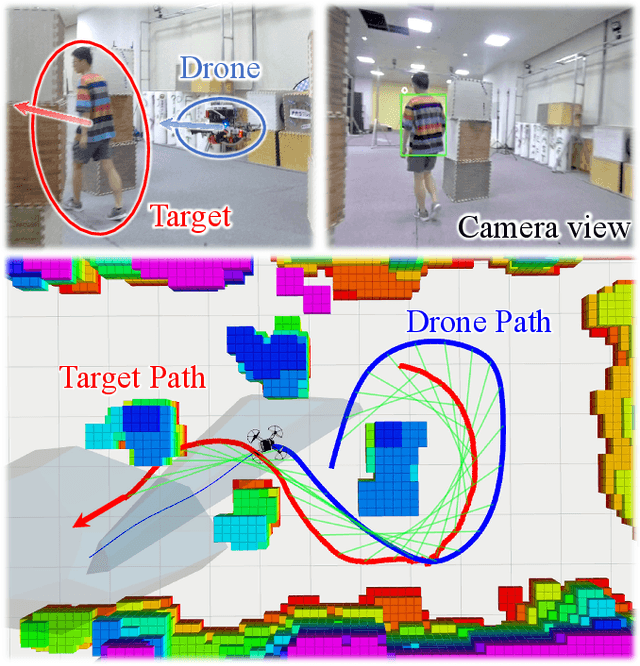
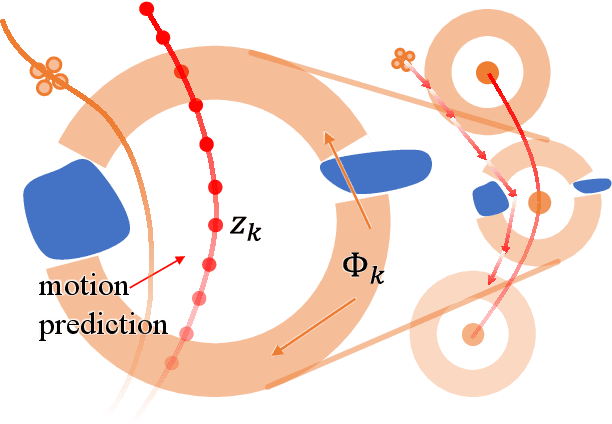
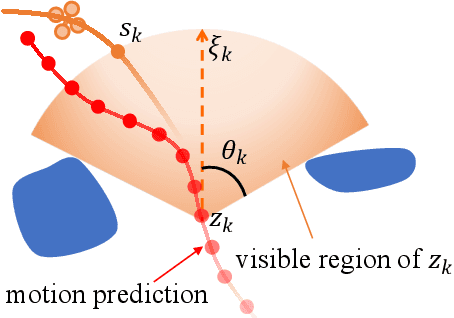
This paper proposes Elastic Tracker, a flexible trajectory planning framework that can deal with challenging tracking tasks with guaranteed safety and visibility. Firstly, an object detection and intension-free motion prediction method is designed. Then an occlusion-aware path finding method is proposed to provide a proper topology. A smart safe flight corridor generation strategy is designed with the guiding path. An analytical occlusion cost is evaluated. Finally, an effective trajectory optimization approach enables to generate a spatio-temporal optimal trajectory within the resultant flight corridor. Particular formulations are designed to guarantee both safety and visibility, with all the above requirements optimized jointly. The experimental results show that our method works more robustly but with less computation than the existing methods, even in some challenging tracking tasks.
Visibility-aware Trajectory Optimization with Application to Aerial Tracking
Mar 11, 2021
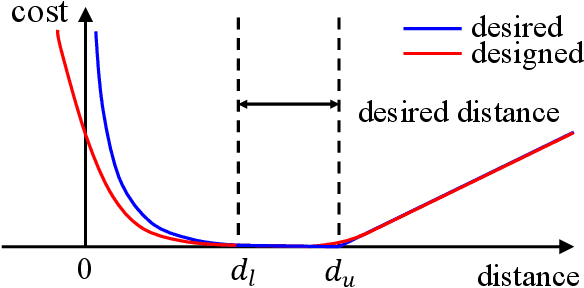
The visibility of targets determines performance and even success rate of various applications, such as active slam, exploration, and target tracking. Therefore, it is crucial to take the visibility of targets into explicit account in trajectory planning. In this paper, we propose a general metric for target visibility, considering observation distance and angle as well as occlusion effect. We formulate this metric into a differentiable visibility cost function, with which spatial trajectory and yaw can be jointly optimized. Furthermore, this visibility-aware trajectory optimization handles dynamic feasibility of position and yaw simultaneously. To validate that our method is practical and generic, we integrate it into a customized quadrotor tracking system. The experimental results show that our visibility-aware planner performs more robustly and observes targets better. In order to benefit related researches, we release our code to the public.
Autonomous Flights in Dynamic Environments with Onboard Vision
Mar 10, 2021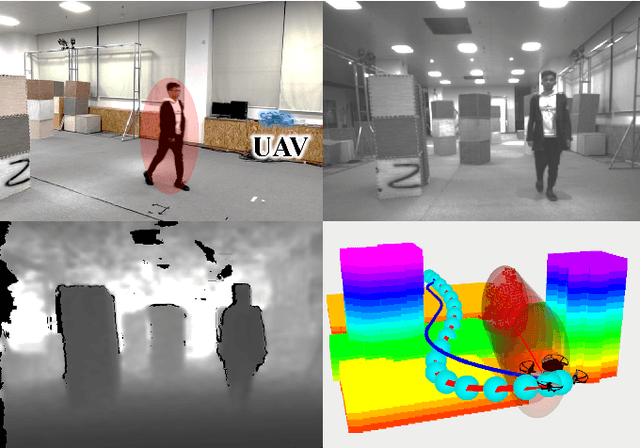
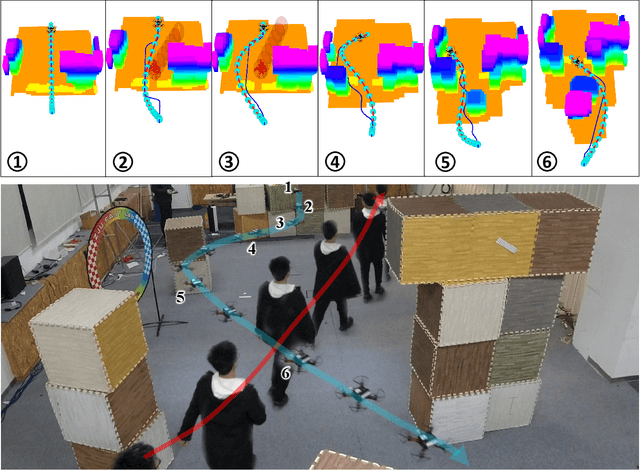
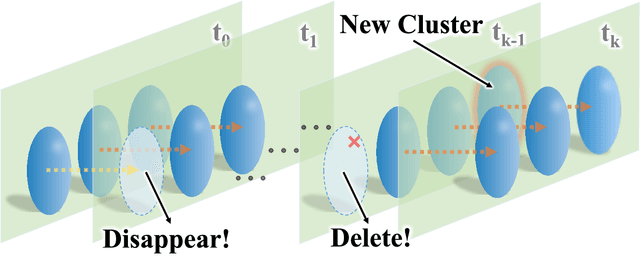
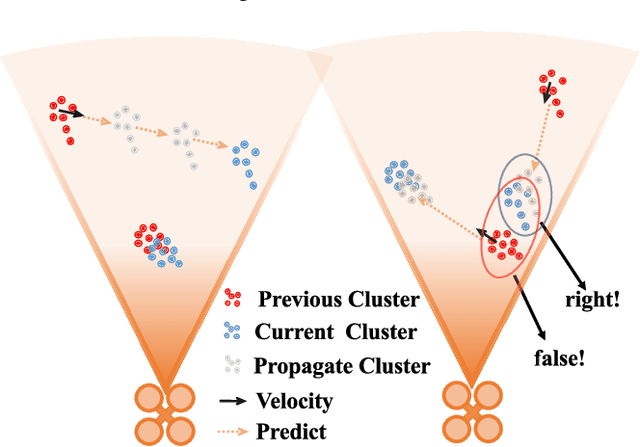
In this paper, we introduce a complete system for autonomous flight of quadrotors in dynamic environments with onboard sensing. Extended from existing work, we develop an occlusion-aware dynamic perception method based on depth images, which classifies obstacles as dynamic and static. For representing generic dynamic environment, we model dynamic objects with moving ellipsoids and fuse static ones into an occupancy grid map. To achieve dynamic avoidance, we design a planning method composed of modified kinodynamic path searching and gradient-based optimization. The method leverages manually constructed gradients without maintaining a signed distance field (SDF), making the planning procedure finished in milliseconds. We integrate the above methods into a customized quadrotor system and thoroughly test it in realworld experiments, verifying its effective collision avoidance in dynamic environments.
Mapless-Planner: A Robust and Fast Planning Framework for Aggressive Autonomous Flight without Map Fusion
Nov 11, 2020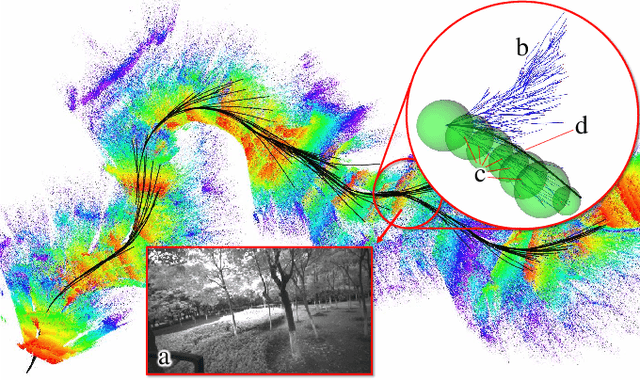
Maintaining a map online is resource-consuming while a robust navigation system usually needs environment abstraction via a well-fused map. In this paper, we propose a mapless planner which directly conducts such abstraction on the unfused sensor data. A limited-memory data structure with a reliable proximity query algorithm is proposed for maintaining raw historical information. A sampling-based scheme is designed to extract the free-space skeleton. A smart waypoint selection strategy enables to generate high-quality trajectories within the resultant flight corridors. Our planner differs from other mapless ones in that it can abstract and exploit the environment information efficiently. The online replan consistency and success rate are both significantly improved against conventional mapless methods.
CMPCC: Corridor-based Model Predictive Contouring Control for Aggressive Drone Flight
Jul 08, 2020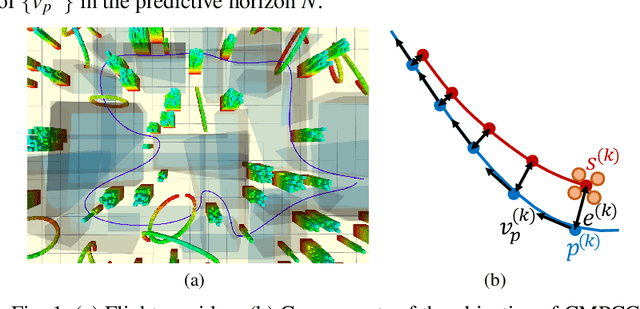
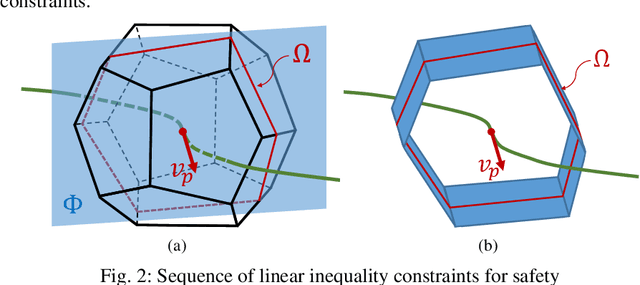
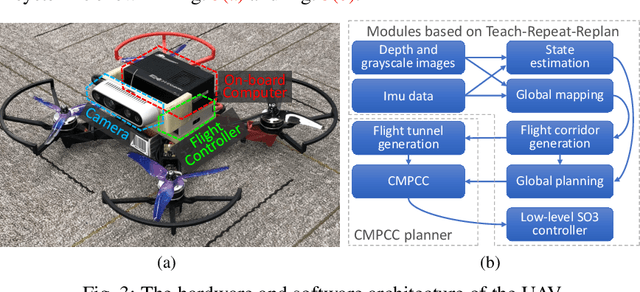
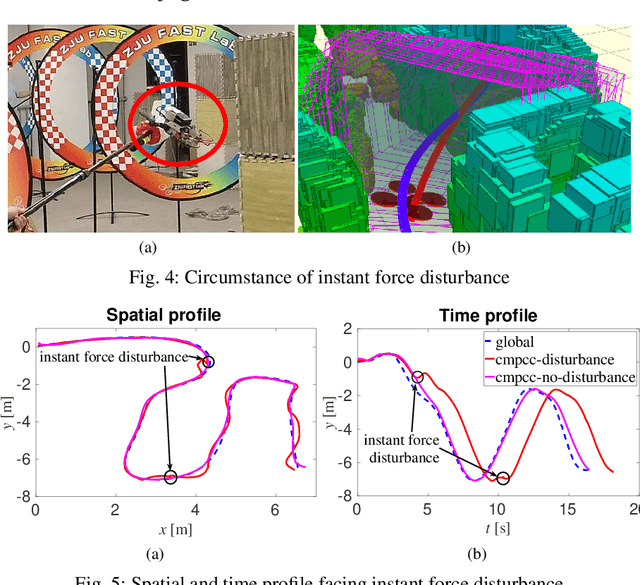
In this paper, we propose an efficient, receding horizon, local adaptive low-level planner as the middle layer between our original planner and controller. Our method is named as corridor-based model predictive contouring control (CMPCC) since it builds upon on MPCC and utilizes the flight corridor as hard safety constraints. It optimizes the flight aggressiveness and tracking accuracy simultaneously, thus improving our system's robustness by overcoming unmeasured disturbances. Our method features its online flight speed optimization, strict safety and feasibility, and real-time performance, and will be released as a low-level plugin for a large variety of quadrotor systems.