 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEPIC: A Lightweight LiDAR-Based UAV Exploration Framework for Large-Scale Scenarios
Oct 18, 2024



Autonomous exploration is a fundamental problem for various applications of unmanned aerial vehicles (UAVs). Recently, LiDAR-based exploration has gained significant attention due to its ability to generate high-precision point cloud maps of large-scale environments. While the point clouds are inherently informative for navigation, many existing exploration methods still rely on additional, often expensive, environmental representations. This reliance stems from two main reasons: the need for frontier detection or information gain computation, which typically depends on memory-intensive occupancy grid maps, and the high computational complexity of path planning directly on point clouds, primarily due to costly collision checking. To address these limitations, we present EPIC, a lightweight LiDAR-based UAV exploration framework that directly exploits point cloud data to explore large-scale environments. EPIC introduces a novel observation map derived directly from the quality of point clouds, eliminating the need for global occupancy grid maps while preserving comprehensive exploration capabilities. We also propose an incremental topological graph construction method operating directly on point clouds, enabling real-time path planning in large-scale environments. Leveraging these components, we build a hierarchical planning framework that generates agile and energy-efficient trajectories, achieving significantly reduced memory consumption and computation time compared to most existing methods. Extensive simulations and real-world experiments demonstrate that EPIC achieves faster exploration while significantly reducing memory consumption compared to state-of-the-art methods.
Robo-centric ESDF: A Fast and Accurate Whole-body Collision Evaluation Tool for Any-shape Robotic Planning
Jun 28, 2023For letting mobile robots travel flexibly through complicated environments, increasing attention has been paid to the whole-body collision evaluation. Most existing works either opt for the conservative corridor-based methods that impose strict requirements on the corridor generation, or ESDF-based methods that suffer from high computational overhead. It is still a great challenge to achieve fast and accurate whole-body collision evaluation. In this paper, we propose a Robo-centric ESDF (RC-ESDF) that is pre-built in the robot body frame and is capable of seamlessly applied to any-shape mobile robots, even for those with non-convex shapes. RC-ESDF enjoys lazy collision evaluation, which retains only the minimum information sufficient for whole-body safety constraint and significantly speeds up trajectory optimization. Based on the analytical gradients provided by RC-ESDF, we optimize the position and rotation of robot jointly, with whole-body safety, smoothness, and dynamical feasibility taken into account. Extensive simulation and real-world experiments verified the reliability and generalizability of our method.
Patient Dropout Prediction in Virtual Health: A Multimodal Dynamic Knowledge Graph and Text Mining Approach
Jun 07, 2023



Virtual health has been acclaimed as a transformative force in healthcare delivery. Yet, its dropout issue is critical that leads to poor health outcomes, increased health, societal, and economic costs. Timely prediction of patient dropout enables stakeholders to take proactive steps to address patients' concerns, potentially improving retention rates. In virtual health, the information asymmetries inherent in its delivery format, between different stakeholders, and across different healthcare delivery systems hinder the performance of existing predictive methods. To resolve those information asymmetries, we propose a Multimodal Dynamic Knowledge-driven Dropout Prediction (MDKDP) framework that learns implicit and explicit knowledge from doctor-patient dialogues and the dynamic and complex networks of various stakeholders in both online and offline healthcare delivery systems. We evaluate MDKDP by partnering with one of the largest virtual health platforms in China. MDKDP improves the F1-score by 3.26 percentage points relative to the best benchmark. Comprehensive robustness analyses show that integrating stakeholder attributes, knowledge dynamics, and compact bilinear pooling significantly improves the performance. Our work provides significant implications for healthcare IT by revealing the value of mining relations and knowledge across different service modalities. Practically, MDKDP offers a novel design artifact for virtual health platforms in patient dropout management.
Dynamic Free-Space Roadmap for Safe Quadrotor Motion Planning
Apr 20, 2022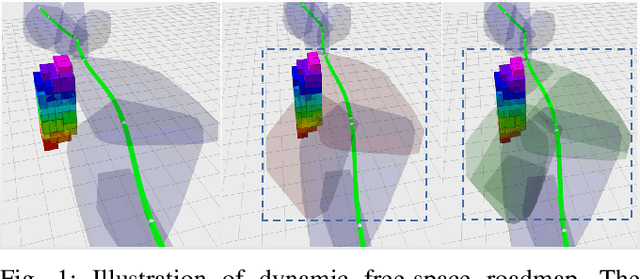
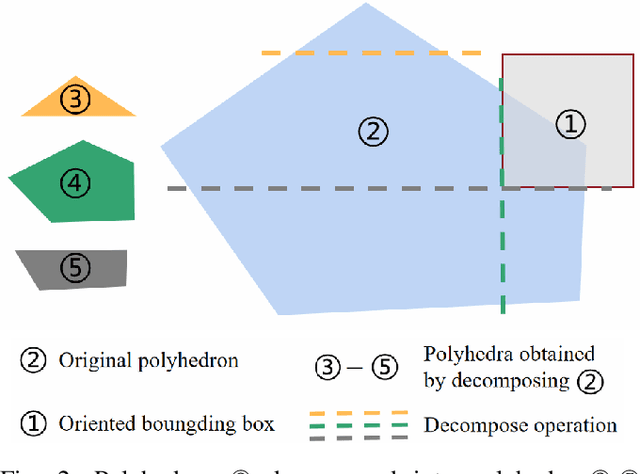
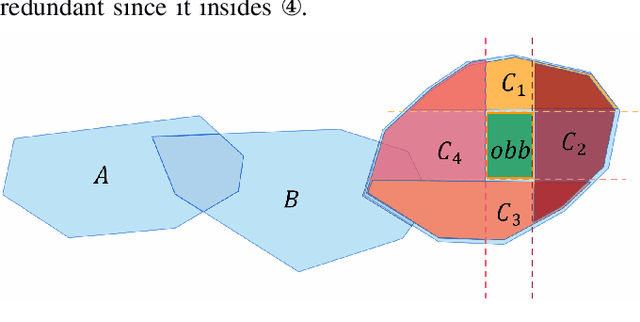
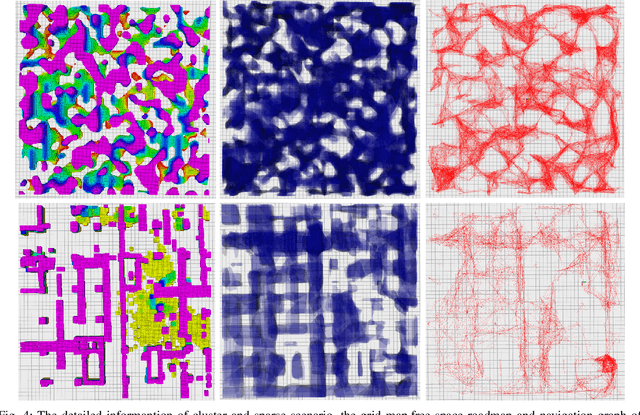
Free-space-oriented roadmaps typically generate a series of convex geometric primitives, which constitute the safe region for motion planning. However, a static environment is assumed for this kind of roadmap. This assumption makes it unable to deal with dynamic obstacles and limits its applications. In this paper, we present a dynamic free-space roadmap, which provides feasible spaces and a navigation graph for safe quadrotor motion planning. Our roadmap is constructed by continuously seeding and extracting free regions in the environment. In order to adapt our map to environments with dynamic obstacles, we incrementally decompose the polyhedra intersecting with obstacles into obstacle-free regions, while the graph is also updated by our well-designed mechanism. Extensive simulations and real-world experiments demonstrate that our method is practically applicable and efficient.