 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWARM: On the Benefits of Weight Averaged Reward Models
Jan 22, 2024Aligning large language models (LLMs) with human preferences through reinforcement learning (RLHF) can lead to reward hacking, where LLMs exploit failures in the reward model (RM) to achieve seemingly high rewards without meeting the underlying objectives. We identify two primary challenges when designing RMs to mitigate reward hacking: distribution shifts during the RL process and inconsistencies in human preferences. As a solution, we propose Weight Averaged Reward Models (WARM), first fine-tuning multiple RMs, then averaging them in the weight space. This strategy follows the observation that fine-tuned weights remain linearly mode connected when sharing the same pre-training. By averaging weights, WARM improves efficiency compared to the traditional ensembling of predictions, while improving reliability under distribution shifts and robustness to preference inconsistencies. Our experiments on summarization tasks, using best-of-N and RL methods, shows that WARM improves the overall quality and alignment of LLM predictions; for example, a policy RL fine-tuned with WARM has a 79.4% win rate against a policy RL fine-tuned with a single RM.
Gemini: A Family of Highly Capable Multimodal Models
Dec 19, 2023This report introduces a new family of multimodal models, Gemini, that exhibit remarkable capabilities across image, audio, video, and text understanding. The Gemini family consists of Ultra, Pro, and Nano sizes, suitable for applications ranging from complex reasoning tasks to on-device memory-constrained use-cases. Evaluation on a broad range of benchmarks shows that our most-capable Gemini Ultra model advances the state of the art in 30 of 32 of these benchmarks - notably being the first model to achieve human-expert performance on the well-studied exam benchmark MMLU, and improving the state of the art in every one of the 20 multimodal benchmarks we examined. We believe that the new capabilities of Gemini models in cross-modal reasoning and language understanding will enable a wide variety of use cases and we discuss our approach toward deploying them responsibly to users.
Nash Learning from Human Feedback
Dec 06, 2023



Reinforcement learning from human feedback (RLHF) has emerged as the main paradigm for aligning large language models (LLMs) with human preferences. Typically, RLHF involves the initial step of learning a reward model from human feedback, often expressed as preferences between pairs of text generations produced by a pre-trained LLM. Subsequently, the LLM's policy is fine-tuned by optimizing it to maximize the reward model through a reinforcement learning algorithm. However, an inherent limitation of current reward models is their inability to fully represent the richness of human preferences and their dependency on the sampling distribution. In this study, we introduce an alternative pipeline for the fine-tuning of LLMs using pairwise human feedback. Our approach entails the initial learning of a preference model, which is conditioned on two inputs given a prompt, followed by the pursuit of a policy that consistently generates responses preferred over those generated by any competing policy, thus defining the Nash equilibrium of this preference model. We term this approach Nash learning from human feedback (NLHF). In the context of a tabular policy representation, we present a novel algorithmic solution, Nash-MD, founded on the principles of mirror descent. This algorithm produces a sequence of policies, with the last iteration converging to the regularized Nash equilibrium. Additionally, we explore parametric representations of policies and introduce gradient descent algorithms for deep-learning architectures. To demonstrate the effectiveness of our approach, we present experimental results involving the fine-tuning of a LLM for a text summarization task. We believe NLHF offers a compelling avenue for preference learning and policy optimization with the potential of advancing the field of aligning LLMs with human preferences.
GKD: Generalized Knowledge Distillation for Auto-regressive Sequence Models
Jun 23, 2023



Knowledge distillation is commonly used for compressing neural networks to reduce their inference cost and memory footprint. However, current distillation methods for auto-regressive models, such as generative language models (LMs), suffer from two key issues: (1) distribution mismatch between output sequences during training and the sequences generated by the student during its deployment, and (2) model under-specification, where the student model may not be expressive enough to fit the teacher's distribution. To address these issues, we propose Generalized Knowledge Distillation (GKD). GKD mitigates distribution mismatch by sampling output sequences from the student during training. Furthermore, GKD handles model under-specification by optimizing alternative divergences, such as reverse KL, that focus on generating samples from the student that are likely under the teacher's distribution. We demonstrate that GKD outperforms commonly-used approaches for distilling LLMs on summarization, machine translation, and arithmetic reasoning tasks.
Factually Consistent Summarization via Reinforcement Learning with Textual Entailment Feedback
May 31, 2023



Despite the seeming success of contemporary grounded text generation systems, they often tend to generate factually inconsistent text with respect to their input. This phenomenon is emphasized in tasks like summarization, in which the generated summaries should be corroborated by their source article. In this work, we leverage recent progress on textual entailment models to directly address this problem for abstractive summarization systems. We use reinforcement learning with reference-free, textual entailment rewards to optimize for factual consistency and explore the ensuing trade-offs, as improved consistency may come at the cost of less informative or more extractive summaries. Our results, according to both automatic metrics and human evaluation, show that our method considerably improves the faithfulness, salience, and conciseness of the generated summaries.
C3PO: Learning to Achieve Arbitrary Goals via Massively Entropic Pretraining
Nov 07, 2022



Given a particular embodiment, we propose a novel method (C3PO) that learns policies able to achieve any arbitrary position and pose. Such a policy would allow for easier control, and would be re-useable as a key building block for downstream tasks. The method is two-fold: First, we introduce a novel exploration algorithm that optimizes for uniform coverage, is able to discover a set of achievable states, and investigates its abilities in attaining both high coverage, and hard-to-discover states; Second, we leverage this set of achievable states as training data for a universal goal-achievement policy, a goal-based SAC variant. We demonstrate the trained policy's performance in achieving a large number of novel states. Finally, we showcase the influence of massive unsupervised training of a goal-achievement policy with state-of-the-art pose-based control of the Hopper, Walker, Halfcheetah, Humanoid and Ant embodiments.
vec2text with Round-Trip Translations
Sep 14, 2022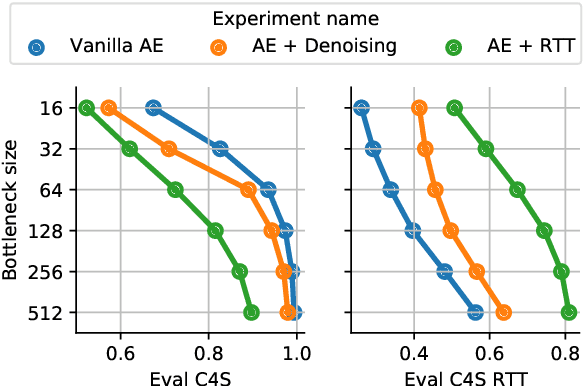
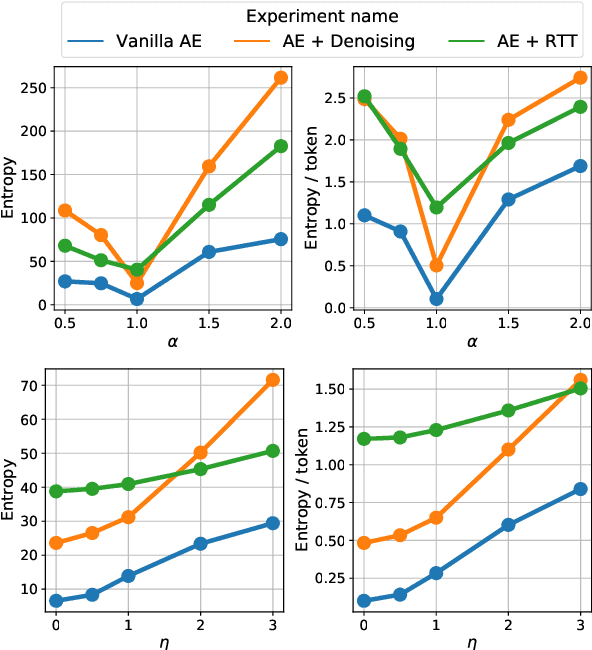
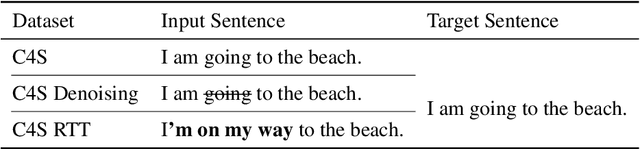
We investigate models that can generate arbitrary natural language text (e.g. all English sentences) from a bounded, convex and well-behaved control space. We call them universal vec2text models. Such models would allow making semantic decisions in the vector space (e.g. via reinforcement learning) while the natural language generation is handled by the vec2text model. We propose four desired properties: universality, diversity, fluency, and semantic structure, that such vec2text models should possess and we provide quantitative and qualitative methods to assess them. We implement a vec2text model by adding a bottleneck to a 250M parameters Transformer model and training it with an auto-encoding objective on 400M sentences (10B tokens) extracted from a massive web corpus. We propose a simple data augmentation technique based on round-trip translations and show in extensive experiments that the resulting vec2text model surprisingly leads to vector spaces that fulfill our four desired properties and that this model strongly outperforms both standard and denoising auto-encoders.
Braxlines: Fast and Interactive Toolkit for RL-driven Behavior Engineering beyond Reward Maximization
Oct 10, 2021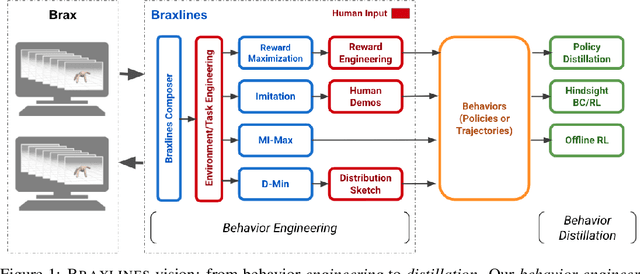


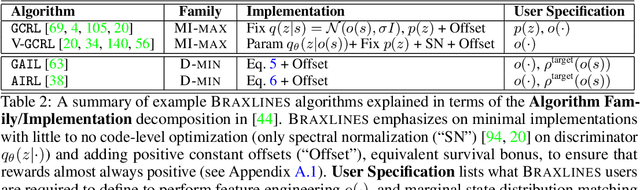
The goal of continuous control is to synthesize desired behaviors. In reinforcement learning (RL)-driven approaches, this is often accomplished through careful task reward engineering for efficient exploration and running an off-the-shelf RL algorithm. While reward maximization is at the core of RL, reward engineering is not the only -- sometimes nor the easiest -- way for specifying complex behaviors. In this paper, we introduce \braxlines, a toolkit for fast and interactive RL-driven behavior generation beyond simple reward maximization that includes Composer, a programmatic API for generating continuous control environments, and set of stable and well-tested baselines for two families of algorithms -- mutual information maximization (MiMax) and divergence minimization (DMin) -- supporting unsupervised skill learning and distribution sketching as other modes of behavior specification. In addition, we discuss how to standardize metrics for evaluating these algorithms, which can no longer rely on simple reward maximization. Our implementations build on a hardware-accelerated Brax simulator in Jax with minimal modifications, enabling behavior synthesis within minutes of training. We hope Braxlines can serve as an interactive toolkit for rapid creation and testing of environments and behaviors, empowering explosions of future benchmark designs and new modes of RL-driven behavior generation and their algorithmic research.
A functional mirror ascent view of policy gradient methods with function approximation
Aug 12, 2021
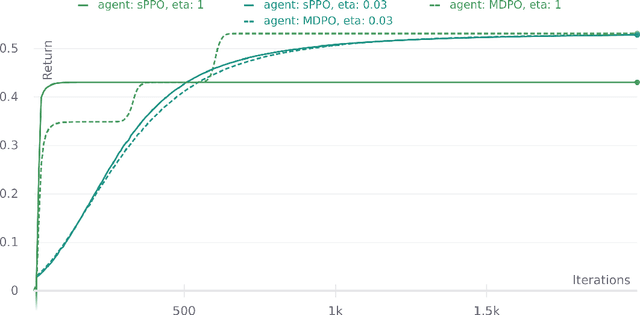
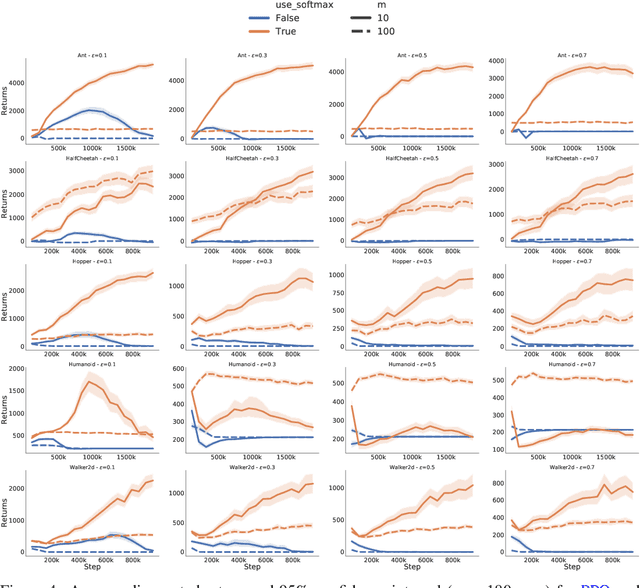
We use functional mirror ascent to propose a general framework (referred to as FMA-PG) for designing policy gradient methods. The functional perspective distinguishes between a policy's functional representation (what are its sufficient statistics) and its parameterization (how are these statistics represented) and naturally results in computationally efficient off-policy updates. For simple policy parameterizations, the FMA-PG framework ensures that the optimal policy is a fixed point of the updates. It also allows us to handle complex policy parameterizations (e.g., neural networks) while guaranteeing policy improvement. Our framework unifies several PG methods and opens the way for designing sample-efficient variants of existing methods. Moreover, it recovers important implementation heuristics (e.g., using forward vs reverse KL divergence) in a principled way. With a softmax functional representation, FMA-PG results in a variant of TRPO with additional desirable properties. It also suggests an improved variant of PPO, whose robustness and efficiency we empirically demonstrate on MuJoCo. Via experiments on simple reinforcement learning problems, we evaluate algorithms instantiated by FMA-PG.
Representation Learning for Out-Of-Distribution Generalization in Reinforcement Learning
Jul 12, 2021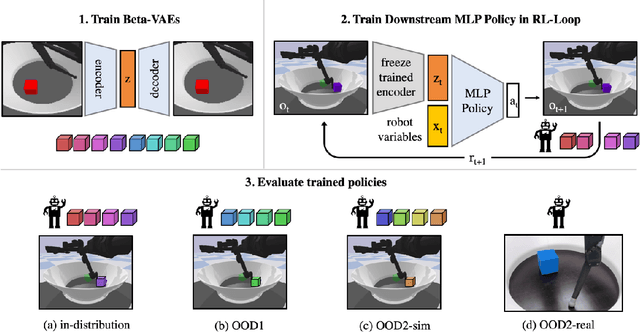
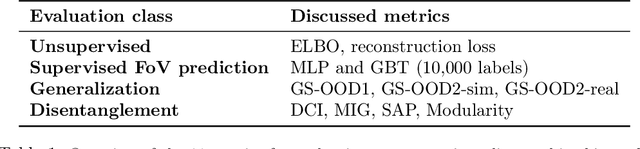
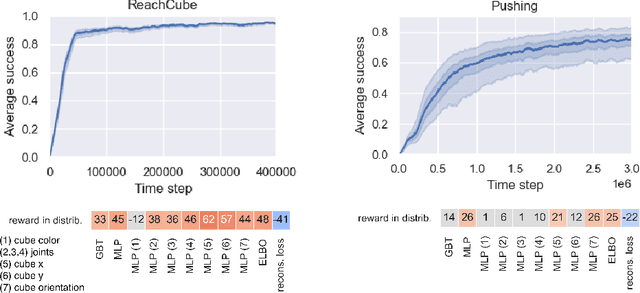
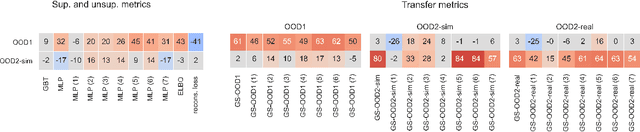
Learning data representations that are useful for various downstream tasks is a cornerstone of artificial intelligence. While existing methods are typically evaluated on downstream tasks such as classification or generative image quality, we propose to assess representations through their usefulness in downstream control tasks, such as reaching or pushing objects. By training over 10,000 reinforcement learning policies, we extensively evaluate to what extent different representation properties affect out-of-distribution (OOD) generalization. Finally, we demonstrate zero-shot transfer of these policies from simulation to the real world, without any domain randomization or fine-tuning. This paper aims to establish the first systematic characterization of the usefulness of learned representations for real-world OOD downstream tasks.