 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConditioned Language Policy: A General Framework for Steerable Multi-Objective Finetuning
Jul 22, 2024



Reward-based finetuning is crucial for aligning language policies with intended behaviors (e.g., creativity and safety). A key challenge here is to develop steerable language models that trade-off multiple (conflicting) objectives in a flexible and efficient manner. This paper presents Conditioned Language Policy (CLP), a general framework for finetuning language models on multiple objectives. Building on techniques from multi-task training and parameter-efficient finetuning, CLP can learn steerable models that effectively trade-off conflicting objectives at inference time. Notably, this does not require training or maintaining multiple models to achieve different trade-offs between the objectives. Through an extensive set of experiments and ablations, we show that the CLP framework learns steerable models that outperform and Pareto-dominate the current state-of-the-art approaches for multi-objective finetuning.
BOND: Aligning LLMs with Best-of-N Distillation
Jul 19, 2024



Reinforcement learning from human feedback (RLHF) is a key driver of quality and safety in state-of-the-art large language models. Yet, a surprisingly simple and strong inference-time strategy is Best-of-N sampling that selects the best generation among N candidates. In this paper, we propose Best-of-N Distillation (BOND), a novel RLHF algorithm that seeks to emulate Best-of-N but without its significant computational overhead at inference time. Specifically, BOND is a distribution matching algorithm that forces the distribution of generations from the policy to get closer to the Best-of-N distribution. We use the Jeffreys divergence (a linear combination of forward and backward KL) to balance between mode-covering and mode-seeking behavior, and derive an iterative formulation that utilizes a moving anchor for efficiency. We demonstrate the effectiveness of our approach and several design choices through experiments on abstractive summarization and Gemma models. Aligning Gemma policies with BOND outperforms other RLHF algorithms by improving results on several benchmarks.
Nash Learning from Human Feedback
Dec 06, 2023



Reinforcement learning from human feedback (RLHF) has emerged as the main paradigm for aligning large language models (LLMs) with human preferences. Typically, RLHF involves the initial step of learning a reward model from human feedback, often expressed as preferences between pairs of text generations produced by a pre-trained LLM. Subsequently, the LLM's policy is fine-tuned by optimizing it to maximize the reward model through a reinforcement learning algorithm. However, an inherent limitation of current reward models is their inability to fully represent the richness of human preferences and their dependency on the sampling distribution. In this study, we introduce an alternative pipeline for the fine-tuning of LLMs using pairwise human feedback. Our approach entails the initial learning of a preference model, which is conditioned on two inputs given a prompt, followed by the pursuit of a policy that consistently generates responses preferred over those generated by any competing policy, thus defining the Nash equilibrium of this preference model. We term this approach Nash learning from human feedback (NLHF). In the context of a tabular policy representation, we present a novel algorithmic solution, Nash-MD, founded on the principles of mirror descent. This algorithm produces a sequence of policies, with the last iteration converging to the regularized Nash equilibrium. Additionally, we explore parametric representations of policies and introduce gradient descent algorithms for deep-learning architectures. To demonstrate the effectiveness of our approach, we present experimental results involving the fine-tuning of a LLM for a text summarization task. We believe NLHF offers a compelling avenue for preference learning and policy optimization with the potential of advancing the field of aligning LLMs with human preferences.
Towards practical reinforcement learning for tokamak magnetic control
Jul 21, 2023



Reinforcement learning (RL) has shown promising results for real-time control systems, including the domain of plasma magnetic control. However, there are still significant drawbacks compared to traditional feedback control approaches for magnetic confinement. In this work, we address key drawbacks of the RL method; achieving higher control accuracy for desired plasma properties, reducing the steady-state error, and decreasing the required time to learn new tasks. We build on top of \cite{degrave2022magnetic}, and present algorithmic improvements to the agent architecture and training procedure. We present simulation results that show up to 65\% improvement in shape accuracy, achieve substantial reduction in the long-term bias of the plasma current, and additionally reduce the training time required to learn new tasks by a factor of 3 or more. We present new experiments using the upgraded RL-based controllers on the TCV tokamak, which validate the simulation results achieved, and point the way towards routinely achieving accurate discharges using the RL approach.
Hyperparameter Selection for Offline Reinforcement Learning
Jul 17, 2020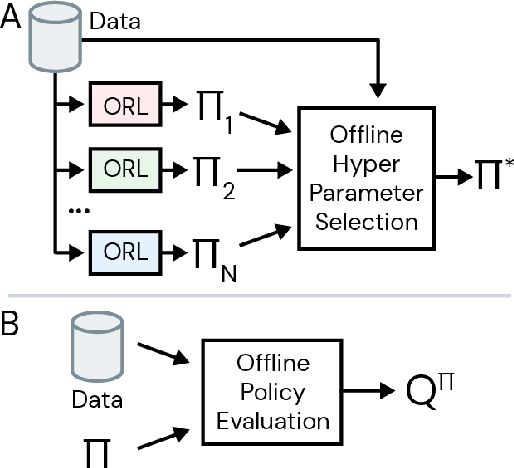
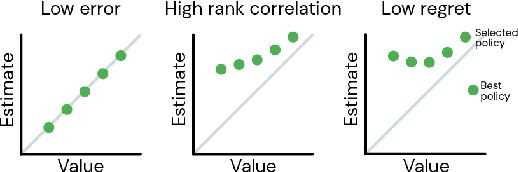
Offline reinforcement learning (RL purely from logged data) is an important avenue for deploying RL techniques in real-world scenarios. However, existing hyperparameter selection methods for offline RL break the offline assumption by evaluating policies corresponding to each hyperparameter setting in the environment. This online execution is often infeasible and hence undermines the main aim of offline RL. Therefore, in this work, we focus on \textit{offline hyperparameter selection}, i.e. methods for choosing the best policy from a set of many policies trained using different hyperparameters, given only logged data. Through large-scale empirical evaluation we show that: 1) offline RL algorithms are not robust to hyperparameter choices, 2) factors such as the offline RL algorithm and method for estimating Q values can have a big impact on hyperparameter selection, and 3) when we control those factors carefully, we can reliably rank policies across hyperparameter choices, and therefore choose policies which are close to the best policy in the set. Overall, our results present an optimistic view that offline hyperparameter selection is within reach, even in challenging tasks with pixel observations, high dimensional action spaces, and long horizon.