 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGemma 3 Technical Report
Mar 25, 2025We introduce Gemma 3, a multimodal addition to the Gemma family of lightweight open models, ranging in scale from 1 to 27 billion parameters. This version introduces vision understanding abilities, a wider coverage of languages and longer context - at least 128K tokens. We also change the architecture of the model to reduce the KV-cache memory that tends to explode with long context. This is achieved by increasing the ratio of local to global attention layers, and keeping the span on local attention short. The Gemma 3 models are trained with distillation and achieve superior performance to Gemma 2 for both pre-trained and instruction finetuned versions. In particular, our novel post-training recipe significantly improves the math, chat, instruction-following and multilingual abilities, making Gemma3-4B-IT competitive with Gemma2-27B-IT and Gemma3-27B-IT comparable to Gemini-1.5-Pro across benchmarks. We release all our models to the community.
Diversity-Rewarded CFG Distillation
Oct 08, 2024Generative models are transforming creative domains such as music generation, with inference-time strategies like Classifier-Free Guidance (CFG) playing a crucial role. However, CFG doubles inference cost while limiting originality and diversity across generated contents. In this paper, we introduce diversity-rewarded CFG distillation, a novel finetuning procedure that distills the strengths of CFG while addressing its limitations. Our approach optimises two training objectives: (1) a distillation objective, encouraging the model alone (without CFG) to imitate the CFG-augmented predictions, and (2) an RL objective with a diversity reward, promoting the generation of diverse outputs for a given prompt. By finetuning, we learn model weights with the ability to generate high-quality and diverse outputs, without any inference overhead. This also unlocks the potential of weight-based model merging strategies: by interpolating between the weights of two models (the first focusing on quality, the second on diversity), we can control the quality-diversity trade-off at deployment time, and even further boost performance. We conduct extensive experiments on the MusicLM (Agostinelli et al., 2023) text-to-music generative model, where our approach surpasses CFG in terms of quality-diversity Pareto optimality. According to human evaluators, our finetuned-then-merged model generates samples with higher quality-diversity than the base model augmented with CFG. Explore our generations at https://google-research.github.io/seanet/musiclm/diverse_music/.
Conditioned Language Policy: A General Framework for Steerable Multi-Objective Finetuning
Jul 22, 2024



Reward-based finetuning is crucial for aligning language policies with intended behaviors (e.g., creativity and safety). A key challenge here is to develop steerable language models that trade-off multiple (conflicting) objectives in a flexible and efficient manner. This paper presents Conditioned Language Policy (CLP), a general framework for finetuning language models on multiple objectives. Building on techniques from multi-task training and parameter-efficient finetuning, CLP can learn steerable models that effectively trade-off conflicting objectives at inference time. Notably, this does not require training or maintaining multiple models to achieve different trade-offs between the objectives. Through an extensive set of experiments and ablations, we show that the CLP framework learns steerable models that outperform and Pareto-dominate the current state-of-the-art approaches for multi-objective finetuning.
BOND: Aligning LLMs with Best-of-N Distillation
Jul 19, 2024



Reinforcement learning from human feedback (RLHF) is a key driver of quality and safety in state-of-the-art large language models. Yet, a surprisingly simple and strong inference-time strategy is Best-of-N sampling that selects the best generation among N candidates. In this paper, we propose Best-of-N Distillation (BOND), a novel RLHF algorithm that seeks to emulate Best-of-N but without its significant computational overhead at inference time. Specifically, BOND is a distribution matching algorithm that forces the distribution of generations from the policy to get closer to the Best-of-N distribution. We use the Jeffreys divergence (a linear combination of forward and backward KL) to balance between mode-covering and mode-seeking behavior, and derive an iterative formulation that utilizes a moving anchor for efficiency. We demonstrate the effectiveness of our approach and several design choices through experiments on abstractive summarization and Gemma models. Aligning Gemma policies with BOND outperforms other RLHF algorithms by improving results on several benchmarks.
MusicRL: Aligning Music Generation to Human Preferences
Feb 06, 2024We propose MusicRL, the first music generation system finetuned from human feedback. Appreciation of text-to-music models is particularly subjective since the concept of musicality as well as the specific intention behind a caption are user-dependent (e.g. a caption such as "upbeat work-out music" can map to a retro guitar solo or a techno pop beat). Not only this makes supervised training of such models challenging, but it also calls for integrating continuous human feedback in their post-deployment finetuning. MusicRL is a pretrained autoregressive MusicLM (Agostinelli et al., 2023) model of discrete audio tokens finetuned with reinforcement learning to maximise sequence-level rewards. We design reward functions related specifically to text-adherence and audio quality with the help from selected raters, and use those to finetune MusicLM into MusicRL-R. We deploy MusicLM to users and collect a substantial dataset comprising 300,000 pairwise preferences. Using Reinforcement Learning from Human Feedback (RLHF), we train MusicRL-U, the first text-to-music model that incorporates human feedback at scale. Human evaluations show that both MusicRL-R and MusicRL-U are preferred to the baseline. Ultimately, MusicRL-RU combines the two approaches and results in the best model according to human raters. Ablation studies shed light on the musical attributes influencing human preferences, indicating that text adherence and quality only account for a part of it. This underscores the prevalence of subjectivity in musical appreciation and calls for further involvement of human listeners in the finetuning of music generation models.
WARM: On the Benefits of Weight Averaged Reward Models
Jan 22, 2024Aligning large language models (LLMs) with human preferences through reinforcement learning (RLHF) can lead to reward hacking, where LLMs exploit failures in the reward model (RM) to achieve seemingly high rewards without meeting the underlying objectives. We identify two primary challenges when designing RMs to mitigate reward hacking: distribution shifts during the RL process and inconsistencies in human preferences. As a solution, we propose Weight Averaged Reward Models (WARM), first fine-tuning multiple RMs, then averaging them in the weight space. This strategy follows the observation that fine-tuned weights remain linearly mode connected when sharing the same pre-training. By averaging weights, WARM improves efficiency compared to the traditional ensembling of predictions, while improving reliability under distribution shifts and robustness to preference inconsistencies. Our experiments on summarization tasks, using best-of-N and RL methods, shows that WARM improves the overall quality and alignment of LLM predictions; for example, a policy RL fine-tuned with WARM has a 79.4% win rate against a policy RL fine-tuned with a single RM.
Gemini: A Family of Highly Capable Multimodal Models
Dec 19, 2023This report introduces a new family of multimodal models, Gemini, that exhibit remarkable capabilities across image, audio, video, and text understanding. The Gemini family consists of Ultra, Pro, and Nano sizes, suitable for applications ranging from complex reasoning tasks to on-device memory-constrained use-cases. Evaluation on a broad range of benchmarks shows that our most-capable Gemini Ultra model advances the state of the art in 30 of 32 of these benchmarks - notably being the first model to achieve human-expert performance on the well-studied exam benchmark MMLU, and improving the state of the art in every one of the 20 multimodal benchmarks we examined. We believe that the new capabilities of Gemini models in cross-modal reasoning and language understanding will enable a wide variety of use cases and we discuss our approach toward deploying them responsibly to users.
Factually Consistent Summarization via Reinforcement Learning with Textual Entailment Feedback
May 31, 2023



Despite the seeming success of contemporary grounded text generation systems, they often tend to generate factually inconsistent text with respect to their input. This phenomenon is emphasized in tasks like summarization, in which the generated summaries should be corroborated by their source article. In this work, we leverage recent progress on textual entailment models to directly address this problem for abstractive summarization systems. We use reinforcement learning with reference-free, textual entailment rewards to optimize for factual consistency and explore the ensuing trade-offs, as improved consistency may come at the cost of less informative or more extractive summaries. Our results, according to both automatic metrics and human evaluation, show that our method considerably improves the faithfulness, salience, and conciseness of the generated summaries.
Get Back Here: Robust Imitation by Return-to-Distribution Planning
May 02, 2023We consider the Imitation Learning (IL) setup where expert data are not collected on the actual deployment environment but on a different version. To address the resulting distribution shift, we combine behavior cloning (BC) with a planner that is tasked to bring the agent back to states visited by the expert whenever the agent deviates from the demonstration distribution. The resulting algorithm, POIR, can be trained offline, and leverages online interactions to efficiently fine-tune its planner to improve performance over time. We test POIR on a variety of human-generated manipulation demonstrations in a realistic robotic manipulation simulator and show robustness of the learned policy to different initial state distributions and noisy dynamics.
vec2text with Round-Trip Translations
Sep 14, 2022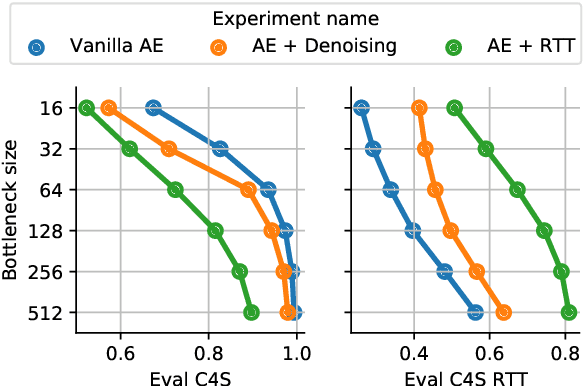
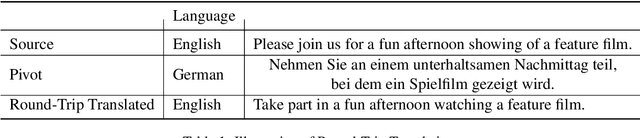
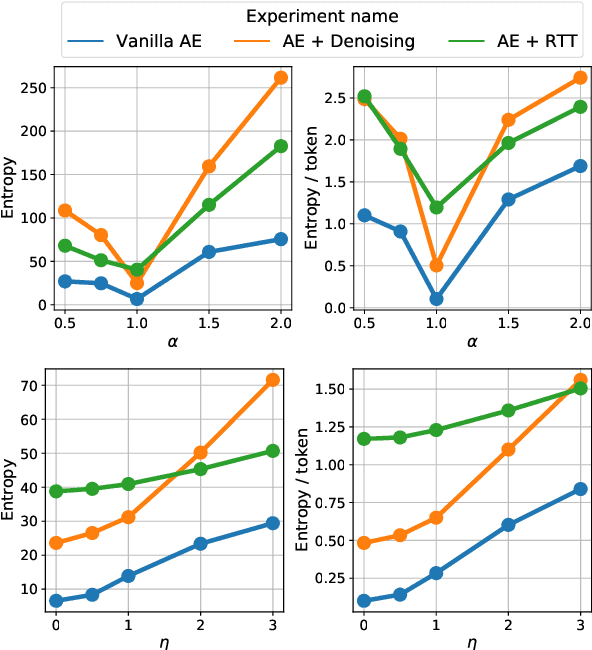
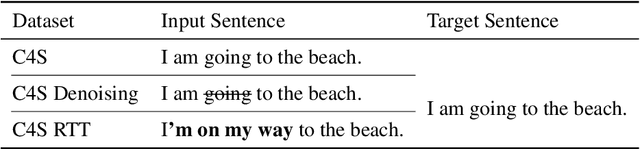
We investigate models that can generate arbitrary natural language text (e.g. all English sentences) from a bounded, convex and well-behaved control space. We call them universal vec2text models. Such models would allow making semantic decisions in the vector space (e.g. via reinforcement learning) while the natural language generation is handled by the vec2text model. We propose four desired properties: universality, diversity, fluency, and semantic structure, that such vec2text models should possess and we provide quantitative and qualitative methods to assess them. We implement a vec2text model by adding a bottleneck to a 250M parameters Transformer model and training it with an auto-encoding objective on 400M sentences (10B tokens) extracted from a massive web corpus. We propose a simple data augmentation technique based on round-trip translations and show in extensive experiments that the resulting vec2text model surprisingly leads to vector spaces that fulfill our four desired properties and that this model strongly outperforms both standard and denoising auto-encoders.