 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBehavior Priors for Efficient Reinforcement Learning
Oct 27, 2020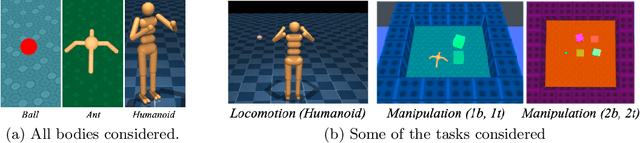

As we deploy reinforcement learning agents to solve increasingly challenging problems, methods that allow us to inject prior knowledge about the structure of the world and effective solution strategies becomes increasingly important. In this work we consider how information and architectural constraints can be combined with ideas from the probabilistic modeling literature to learn behavior priors that capture the common movement and interaction patterns that are shared across a set of related tasks or contexts. For example the day-to day behavior of humans comprises distinctive locomotion and manipulation patterns that recur across many different situations and goals. We discuss how such behavior patterns can be captured using probabilistic trajectory models and how these can be integrated effectively into reinforcement learning schemes, e.g.\ to facilitate multi-task and transfer learning. We then extend these ideas to latent variable models and consider a formulation to learn hierarchical priors that capture different aspects of the behavior in reusable modules. We discuss how such latent variable formulations connect to related work on hierarchical reinforcement learning (HRL) and mutual information and curiosity based objectives, thereby offering an alternative perspective on existing ideas. We demonstrate the effectiveness of our framework by applying it to a range of simulated continuous control domains.
Robust Constrained Reinforcement Learning for Continuous Control with Model Misspecification
Oct 20, 2020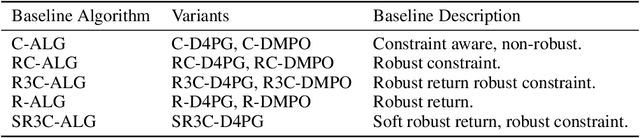
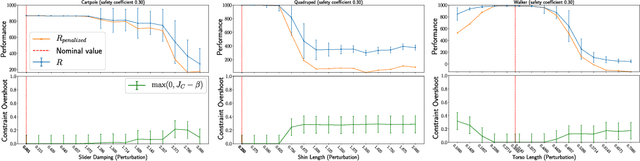
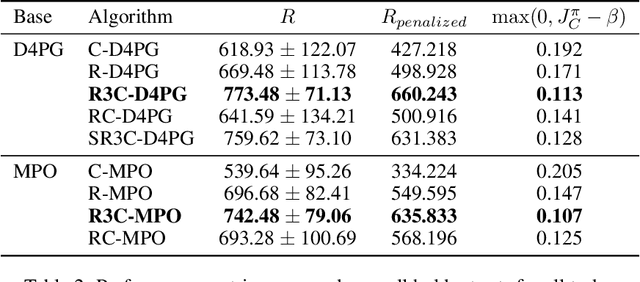
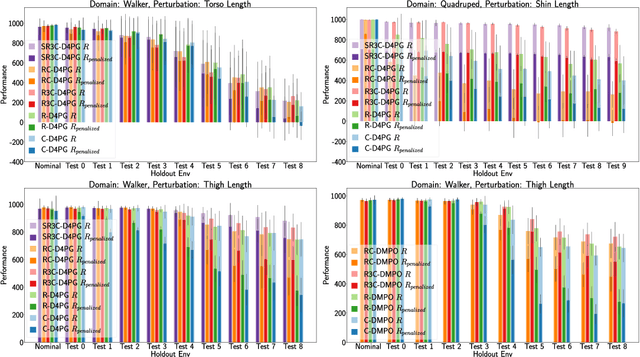
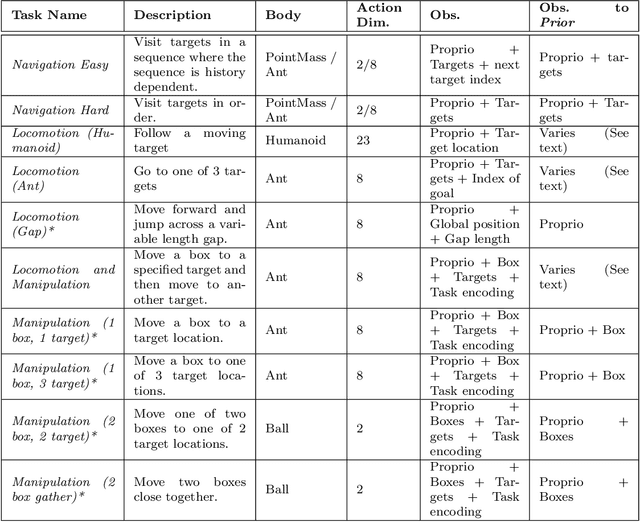
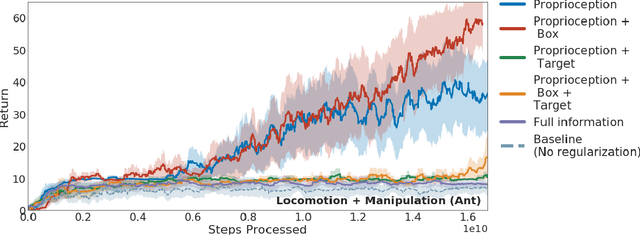
Many real-world physical control systems are required to satisfy constraints upon deployment. Furthermore, real-world systems are often subject to effects such as non-stationarity, wear-and-tear, uncalibrated sensors and so on. Such effects effectively perturb the system dynamics and can cause a policy trained successfully in one domain to perform poorly when deployed to a perturbed version of the same domain. This can affect a policy's ability to maximize future rewards as well as the extent to which it satisfies constraints. We refer to this as constrained model misspecification. We present an algorithm with theoretical guarantees that mitigates this form of misspecification, and showcase its performance in multiple Mujoco tasks from the Real World Reinforcement Learning (RWRL) suite.
Learning Dexterous Manipulation from Suboptimal Experts
Oct 16, 2020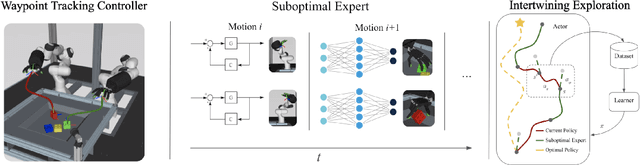
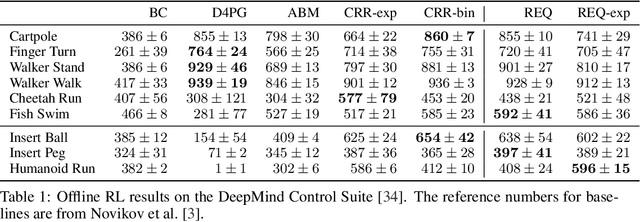
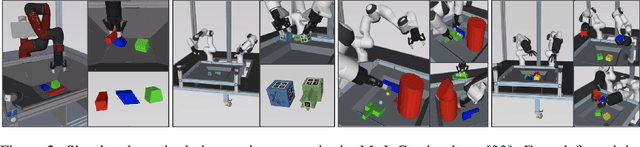
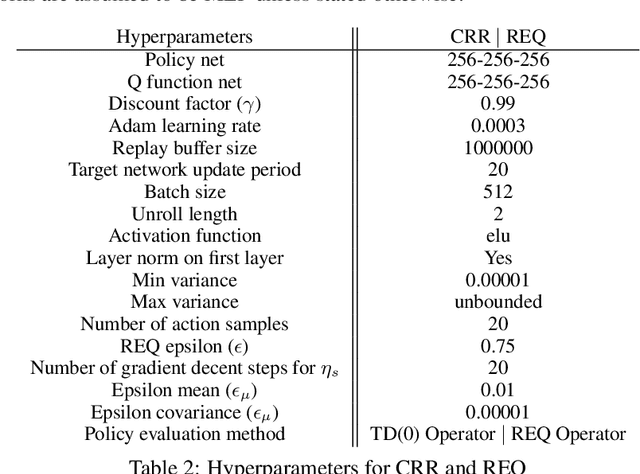
Learning dexterous manipulation in high-dimensional state-action spaces is an important open challenge with exploration presenting a major bottleneck. Although in many cases the learning process could be guided by demonstrations or other suboptimal experts, current RL algorithms for continuous action spaces often fail to effectively utilize combinations of highly off-policy expert data and on-policy exploration data. As a solution, we introduce Relative Entropy Q-Learning (REQ), a simple policy iteration algorithm that combines ideas from successful offline and conventional RL algorithms. It represents the optimal policy via importance sampling from a learned prior and is well-suited to take advantage of mixed data distributions. We demonstrate experimentally that REQ outperforms several strong baselines on robotic manipulation tasks for which suboptimal experts are available. We show how suboptimal experts can be constructed effectively by composing simple waypoint tracking controllers, and we also show how learned primitives can be combined with waypoint controllers to obtain reference behaviors to bootstrap a complex manipulation task on a simulated bimanual robot with human-like hands. Finally, we show that REQ is also effective for general off-policy RL, offline RL, and RL from demonstrations. Videos and further materials are available at sites.google.com/view/rlfse.
Local Search for Policy Iteration in Continuous Control
Oct 12, 2020
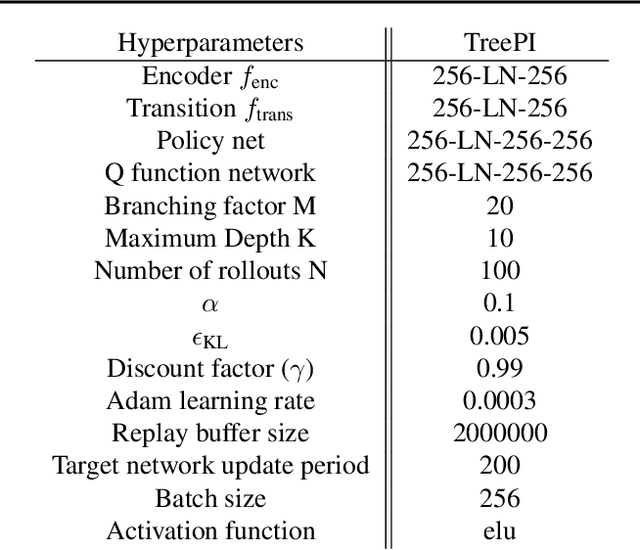
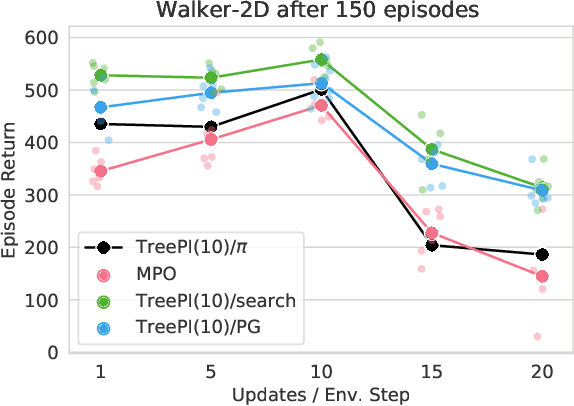
We present an algorithm for local, regularized, policy improvement in reinforcement learning (RL) that allows us to formulate model-based and model-free variants in a single framework. Our algorithm can be interpreted as a natural extension of work on KL-regularized RL and introduces a form of tree search for continuous action spaces. We demonstrate that additional computation spent on model-based policy improvement during learning can improve data efficiency, and confirm that model-based policy improvement during action selection can also be beneficial. Quantitatively, our algorithm improves data efficiency on several continuous control benchmarks (when a model is learned in parallel), and it provides significant improvements in wall-clock time in high-dimensional domains (when a ground truth model is available). The unified framework also helps us to better understand the space of model-based and model-free algorithms. In particular, we demonstrate that some benefits attributed to model-based RL can be obtained without a model, simply by utilizing more computation.
Temporal Difference Uncertainties as a Signal for Exploration
Oct 05, 2020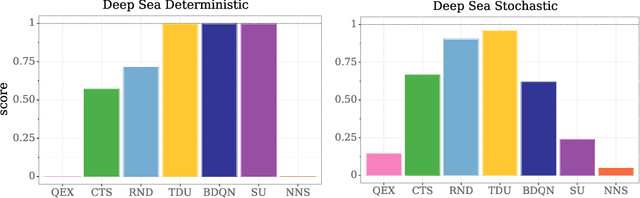
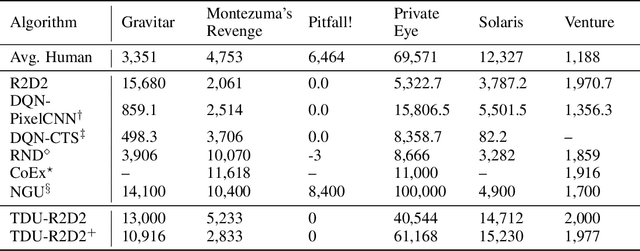
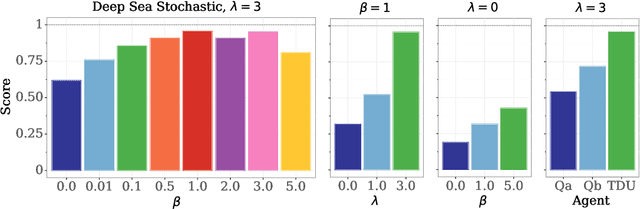
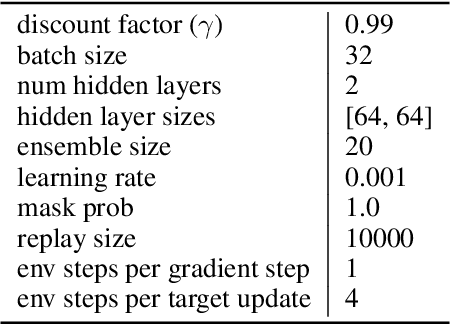
An effective approach to exploration in reinforcement learning is to rely on an agent's uncertainty over the optimal policy, which can yield near-optimal exploration strategies in tabular settings. However, in non-tabular settings that involve function approximators, obtaining accurate uncertainty estimates is almost as challenging a problem. In this paper, we highlight that value estimates are easily biased and temporally inconsistent. In light of this, we propose a novel method for estimating uncertainty over the value function that relies on inducing a distribution over temporal difference errors. This exploration signal controls for state-action transitions so as to isolate uncertainty in value that is due to uncertainty over the agent's parameters. Because our measure of uncertainty conditions on state-action transitions, we cannot act on this measure directly. Instead, we incorporate it as an intrinsic reward and treat exploration as a separate learning problem, induced by the agent's temporal difference uncertainties. We introduce a distinct exploration policy that learns to collect data with high estimated uncertainty, which gives rise to a curriculum that smoothly changes throughout learning and vanishes in the limit of perfect value estimates. We evaluate our method on hard exploration tasks, including Deep Sea and Atari 2600 environments and find that our proposed form of exploration facilitates both diverse and deep exploration.
Action and Perception as Divergence Minimization
Oct 05, 2020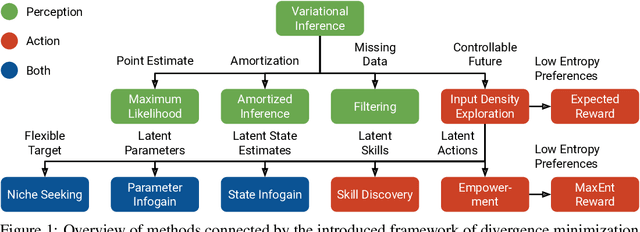
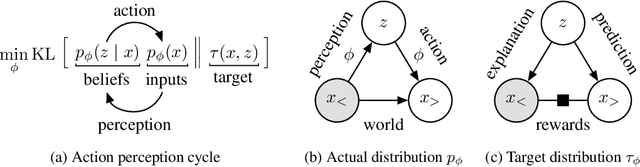
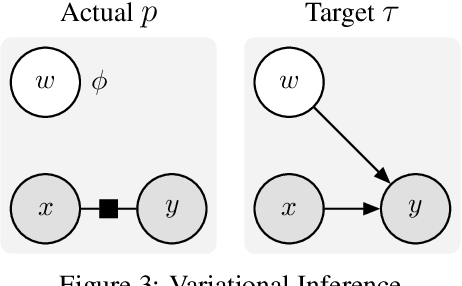
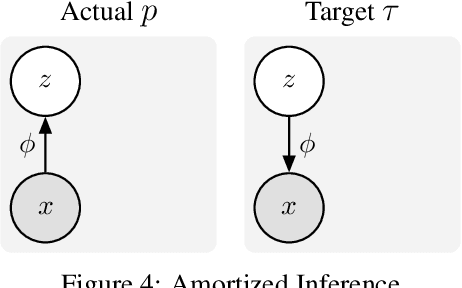
We introduce a unified objective for action and perception of intelligent agents. Extending representation learning and control, we minimize the joint divergence between the combined system of agent and environment and a target distribution. Intuitively, such agents use perception to align their beliefs with the world, and use actions to align the world with their beliefs. Minimizing the joint divergence to an expressive target maximizes the mutual information between the agent's representations and inputs, thus inferring representations that are informative of past inputs and exploring future inputs that are informative of the representations. This lets us explain intrinsic objectives, such as representation learning, information gain, empowerment, and skill discovery from minimal assumptions. Moreover, interpreting the target distribution as a latent variable model suggests powerful world models as a path toward highly adaptive agents that seek large niches in their environments, rendering task rewards optional. The framework provides a common language for comparing a wide range of objectives, advances the understanding of latent variables for decision making, and offers a recipe for designing novel objectives. We recommend deriving future agent objectives the joint divergence to facilitate comparison, to point out the agent's target distribution, and to identify the intrinsic objective terms needed to reach that distribution.
Beyond Tabula-Rasa: a Modular Reinforcement Learning Approach for Physically Embedded 3D Sokoban
Oct 03, 2020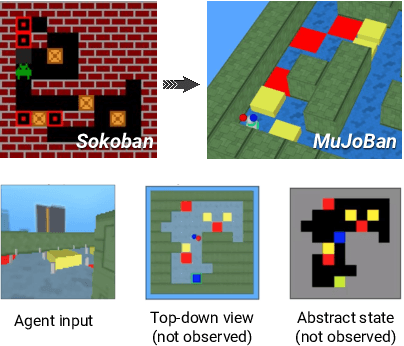
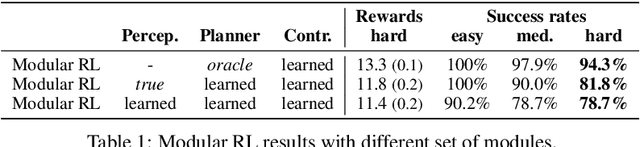

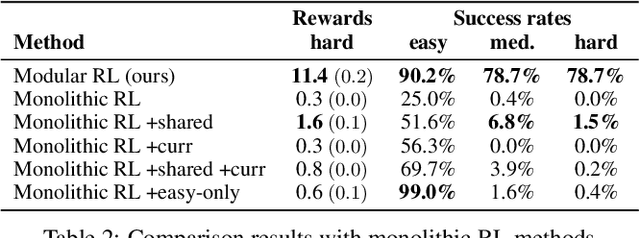
Intelligent robots need to achieve abstract objectives using concrete, spatiotemporally complex sensory information and motor control. Tabula rasa deep reinforcement learning (RL) has tackled demanding tasks in terms of either visual, abstract, or physical reasoning, but solving these jointly remains a formidable challenge. One recent, unsolved benchmark task that integrates these challenges is Mujoban, where a robot needs to arrange 3D warehouses generated from 2D Sokoban puzzles. We explore whether integrated tasks like Mujoban can be solved by composing RL modules together in a sense-plan-act hierarchy, where modules have well-defined roles similarly to classic robot architectures. Unlike classic architectures that are typically model-based, we use only model-free modules trained with RL or supervised learning. We find that our modular RL approach dramatically outperforms the state-of-the-art monolithic RL agent on Mujoban. Further, learned modules can be reused when, e.g., using a different robot platform to solve the same task. Together our results give strong evidence for the importance of research into modular RL designs. Project website: https://sites.google.com/view/modular-rl/
Learning to swim in potential flow
Sep 30, 2020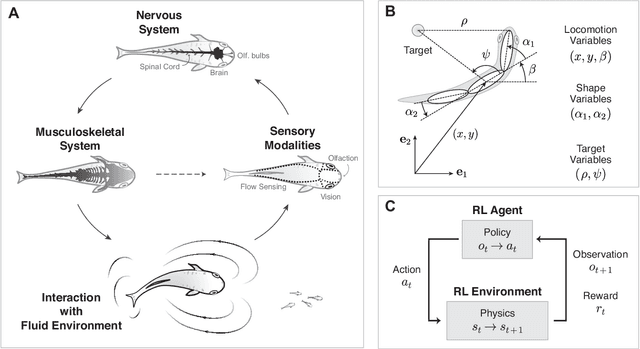
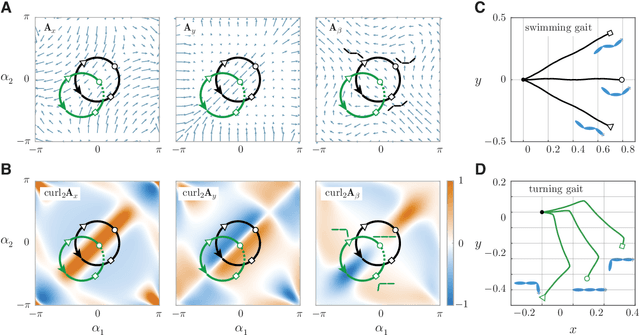
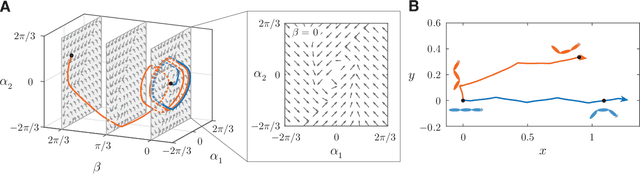
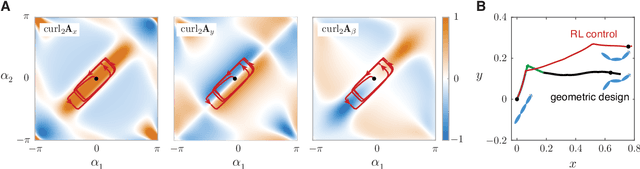
Fish swim by undulating their bodies. These propulsive motions require coordinated shape changes of a body that interacts with its fluid environment, but the specific shape coordination that leads to robust turning and swimming motions remains unclear. We propose a simple model of a three-link fish swimming in a potential flow environment and we use model-free reinforcement learning to arrive at optimal shape changes for two swimming tasks: swimming in a desired direction and swimming towards a known target. This fish model belongs to a class of problems in geometric mechanics, known as driftless dynamical systems, which allow us to analyze the swimming behavior in terms of geometric phases over the shape space of the fish. These geometric methods are less intuitive in the presence of drift. Here, we use the shape space analysis as a tool for assessing, visualizing, and interpreting the control policies obtained via reinforcement learning in the absence of drift. We then examine the robustness of these policies to drift-related perturbations. Although the fish has no direct control over the drift itself, it learns to take advantage of the presence of moderate drift to reach its target.
Physically Embedded Planning Problems: New Challenges for Reinforcement Learning
Sep 11, 2020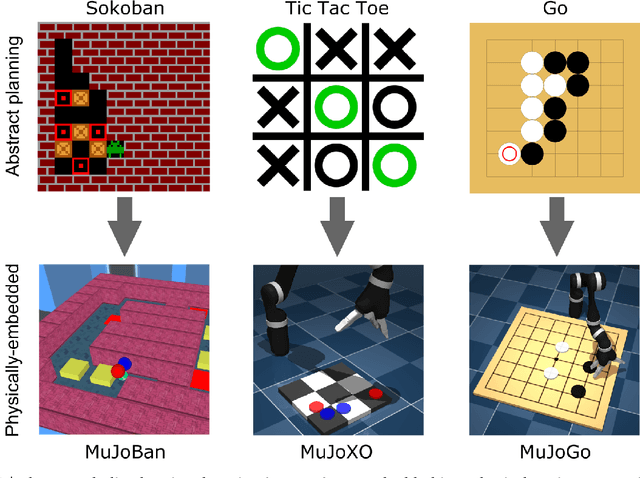

Recent work in deep reinforcement learning (RL) has produced algorithms capable of mastering challenging games such as Go, chess, or shogi. In these works the RL agent directly observes the natural state of the game and controls that state directly with its actions. However, when humans play such games, they do not just reason about the moves but also interact with their physical environment. They understand the state of the game by looking at the physical board in front of them and modify it by manipulating pieces using touch and fine-grained motor control. Mastering complicated physical systems with abstract goals is a central challenge for artificial intelligence, but it remains out of reach for existing RL algorithms. To encourage progress towards this goal we introduce a set of physically embedded planning problems and make them publicly available. We embed challenging symbolic tasks (Sokoban, tic-tac-toe, and Go) in a physics engine to produce a set of tasks that require perception, reasoning, and motor control over long time horizons. Although existing RL algorithms can tackle the symbolic versions of these tasks, we find that they struggle to master even the simplest of their physically embedded counterparts. As a first step towards characterizing the space of solution to these tasks, we introduce a strong baseline that uses a pre-trained expert game player to provide hints in the abstract space to an RL agent's policy while training it on the full sensorimotor control task. The resulting agent solves many of the tasks, underlining the need for methods that bridge the gap between abstract planning and embodied control.
Importance Weighted Policy Learning and Adaption
Sep 10, 2020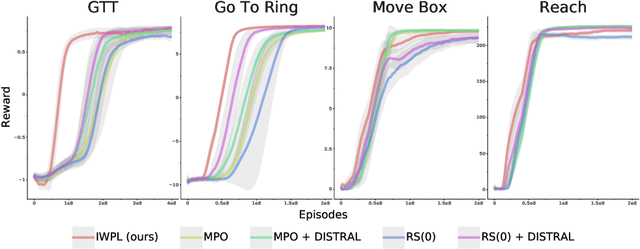
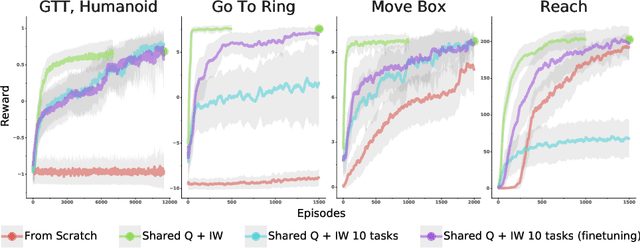
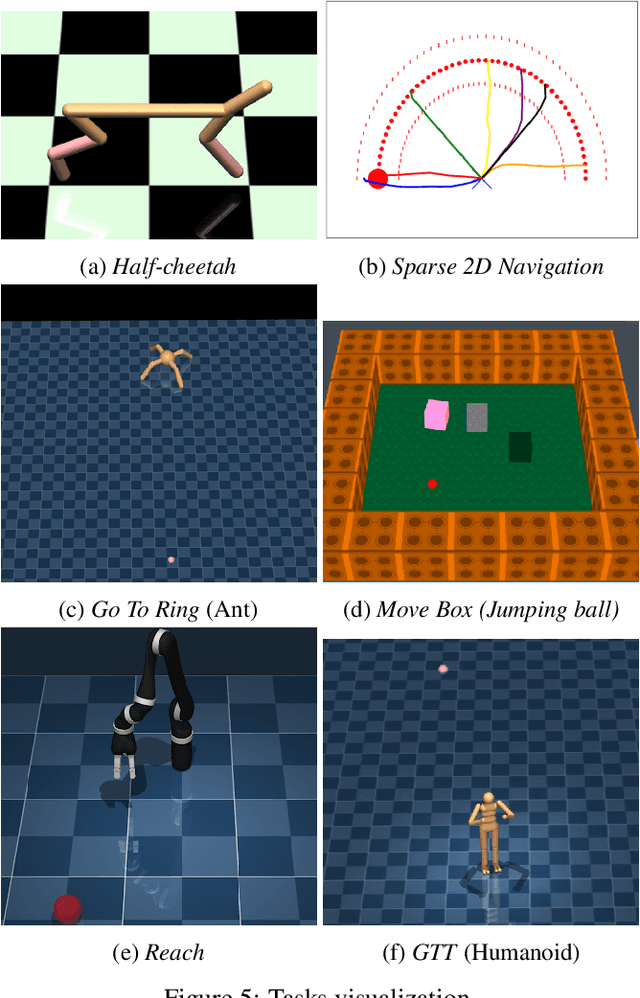
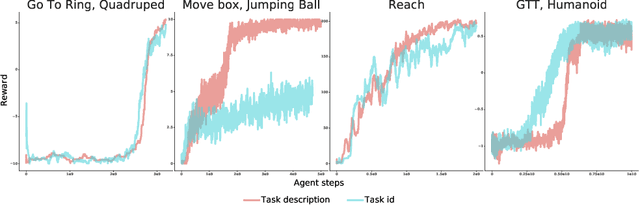
The ability to exploit prior experience to solve novel problems rapidly is a hallmark of biological learning systems and of great practical importance for artificial ones. In the meta reinforcement learning literature much recent work has focused on the problem of optimizing the learning process itself. In this paper we study a complementary approach which is conceptually simple, general, modular and built on top of recent improvements in off-policy learning. The framework is inspired by ideas from the probabilistic inference literature and combines robust off-policy learning with a behavior prior, or default behavior that constrains the space of solutions and serves as a bias for exploration; as well as a representation for the value function, both of which are easily learned from a number of training tasks in a multi-task scenario. Our approach achieves competitive adaptation performance on hold-out tasks compared to meta reinforcement learning baselines and can scale to complex sparse-reward scenarios.