 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSinkhorn-CPD: Robust point cloud registration via unbalanced entropic optimal transport
Jun 15, 2026Coherent Point Drift (CPD) is widely used for rigid point cloud registration because of its soft correspondences and closed-form parameter updates. However, CPD's target-side marginal constraint forces every observation, including outliers, to receive exactly unit probability mass. This assumption degrades registration accuracy under heavy outliers and partial overlap. Optimal transport (OT) methods can handle missing mass through unbalanced formulations, but require hand-tuned annealing schedules. In this paper, we propose Sinkhorn-CPD, which replaces CPD's target-side marginal constraint with dual Kullback-Leibler penalties, allowing the algorithm to discard outliers on both sides. The resulting formulation is a fully unbalanced entropic optimal transport problem, which can be efficiently solved by generalized Sinkhorn iterations. Moreover, Sinkhorn-CPD preserves the closed-form Procrustes and variance updates of CPD. In our method, the variance sigma^2 plays the role of the entropic regularization parameter, which induces an automatic annealing schedule from diffuse to sharp correspondences without manual temperature tuning. Experiments on synthetic, cross-category, and scan-to-CAD benchmarks show that Sinkhorn-CPD achieves state-of-the-art accuracy, with strong robustness to outliers and partial overlap.
* 14 pages, 10 figures; journal version published in Computer-Aided Design
PADReg: Physics-Aware Deformable Registration Guided by Contact Force for Ultrasound Sequences
Aug 12, 2025Ultrasound deformable registration estimates spatial transformations between pairs of deformed ultrasound images, which is crucial for capturing biomechanical properties and enhancing diagnostic accuracy in diseases such as thyroid nodules and breast cancer. However, ultrasound deformable registration remains highly challenging, especially under large deformation. The inherently low contrast, heavy noise and ambiguous tissue boundaries in ultrasound images severely hinder reliable feature extraction and correspondence matching. Existing methods often suffer from poor anatomical alignment and lack physical interpretability. To address the problem, we propose PADReg, a physics-aware deformable registration framework guided by contact force. PADReg leverages synchronized contact force measured by robotic ultrasound systems as a physical prior to constrain the registration. Specifically, instead of directly predicting deformation fields, we first construct a pixel-wise stiffness map utilizing the multi-modal information from contact force and ultrasound images. The stiffness map is then combined with force data to estimate a dense deformation field, through a lightweight physics-aware module inspired by Hooke's law. This design enables PADReg to achieve physically plausible registration with better anatomical alignment than previous methods relying solely on image similarity. Experiments on in-vivo datasets demonstrate that it attains a HD95 of 12.90, which is 21.34\% better than state-of-the-art methods. The source code is available at https://github.com/evelynskip/PADReg.
Towards Unifying Understanding and Generation in the Era of Vision Foundation Models: A Survey from the Autoregression Perspective
Oct 29, 2024


Autoregression in large language models (LLMs) has shown impressive scalability by unifying all language tasks into the next token prediction paradigm. Recently, there is a growing interest in extending this success to vision foundation models. In this survey, we review the recent advances and discuss future directions for autoregressive vision foundation models. First, we present the trend for next generation of vision foundation models, i.e., unifying both understanding and generation in vision tasks. We then analyze the limitations of existing vision foundation models, and present a formal definition of autoregression with its advantages. Later, we categorize autoregressive vision foundation models from their vision tokenizers and autoregression backbones. Finally, we discuss several promising research challenges and directions. To the best of our knowledge, this is the first survey to comprehensively summarize autoregressive vision foundation models under the trend of unifying understanding and generation. A collection of related resources is available at https://github.com/EmmaSRH/ARVFM.
OCMG-Net: Neural Oriented Normal Refinement for Unstructured Point Clouds
Sep 02, 2024We present a robust refinement method for estimating oriented normals from unstructured point clouds. In contrast to previous approaches that either suffer from high computational complexity or fail to achieve desirable accuracy, our novel framework incorporates sign orientation and data augmentation in the feature space to refine the initial oriented normals, striking a balance between efficiency and accuracy. To address the issue of noise-caused direction inconsistency existing in previous approaches, we introduce a new metric called the Chamfer Normal Distance, which faithfully minimizes the estimation error by correcting the annotated normal with the closest point found on the potentially clean point cloud. This metric not only tackles the challenge but also aids in network training and significantly enhances network robustness against noise. Moreover, we propose an innovative dual-parallel architecture that integrates Multi-scale Local Feature Aggregation and Hierarchical Geometric Information Fusion, which enables the network to capture intricate geometric details more effectively and notably reduces ambiguity in scale selection. Extensive experiments demonstrate the superiority and versatility of our method in both unoriented and oriented normal estimation tasks across synthetic and real-world datasets among indoor and outdoor scenarios. The code is available at https://github.com/YingruiWoo/OCMG-Net.git.
Force Sensing Guided Artery-Vein Segmentation via Sequential Ultrasound Images
Jul 31, 2024Accurate identification of arteries and veins in ultrasound images is crucial for vascular examinations and interventions in robotics-assisted surgeries. However, current methods for ultrasound vessel segmentation face challenges in distinguishing between arteries and veins due to their morphological similarities. To address this challenge, this study introduces a novel force sensing guided segmentation approach to enhance artery-vein segmentation accuracy by leveraging their distinct deformability. Our proposed method utilizes force magnitude to identify key frames with the most significant vascular deformation in a sequence of ultrasound images. These key frames are then integrated with the current frame through attention mechanisms, with weights assigned in accordance with force magnitude. Our proposed force sensing guided framework can be seamlessly integrated into various segmentation networks and achieves significant performance improvements in multiple U-shaped networks such as U-Net, Swin-unet and Transunet. Furthermore, we contribute the first multimodal ultrasound artery-vein segmentation dataset, Mus-V, which encompasses both force and image data simultaneously. The dataset comprises 3114 ultrasound images of carotid and femoral vessels extracted from 105 videos, with corresponding force data recorded by the force sensor mounted on the US probe. Our code and dataset will be publicly available.
Correspondence-Free Non-Rigid Point Set Registration Using Unsupervised Clustering Analysis
Jun 27, 2024This paper presents a novel non-rigid point set registration method that is inspired by unsupervised clustering analysis. Unlike previous approaches that treat the source and target point sets as separate entities, we develop a holistic framework where they are formulated as clustering centroids and clustering members, separately. We then adopt Tikhonov regularization with an $\ell_1$-induced Laplacian kernel instead of the commonly used Gaussian kernel to ensure smooth and more robust displacement fields. Our formulation delivers closed-form solutions, theoretical guarantees, independence from dimensions, and the ability to handle large deformations. Subsequently, we introduce a clustering-improved Nystr\"om method to effectively reduce the computational complexity and storage of the Gram matrix to linear, while providing a rigorous bound for the low-rank approximation. Our method achieves high accuracy results across various scenarios and surpasses competitors by a significant margin, particularly on shapes with substantial deformations. Additionally, we demonstrate the versatility of our method in challenging tasks such as shape transfer and medical registration.
E$^3$-Net: Efficient E-Equivariant Normal Estimation Network
Jun 01, 2024Point cloud normal estimation is a fundamental task in 3D geometry processing. While recent learning-based methods achieve notable advancements in normal prediction, they often overlook the critical aspect of equivariance. This results in inefficient learning of symmetric patterns. To address this issue, we propose E3-Net to achieve equivariance for normal estimation. We introduce an efficient random frame method, which significantly reduces the training resources required for this task to just 1/8 of previous work and improves the accuracy. Further, we design a Gaussian-weighted loss function and a receptive-aware inference strategy that effectively utilizes the local properties of point clouds. Our method achieves superior results on both synthetic and real-world datasets, and outperforms current state-of-the-art techniques by a substantial margin. We improve RMSE by 4% on the PCPNet dataset, 2.67% on the SceneNN dataset, and 2.44% on the FamousShape dataset.
CMG-Net: Robust Normal Estimation for Point Clouds via Chamfer Normal Distance and Multi-scale Geometry
Dec 14, 2023



This work presents an accurate and robust method for estimating normals from point clouds. In contrast to predecessor approaches that minimize the deviations between the annotated and the predicted normals directly, leading to direction inconsistency, we first propose a new metric termed Chamfer Normal Distance to address this issue. This not only mitigates the challenge but also facilitates network training and substantially enhances the network robustness against noise. Subsequently, we devise an innovative architecture that encompasses Multi-scale Local Feature Aggregation and Hierarchical Geometric Information Fusion. This design empowers the network to capture intricate geometric details more effectively and alleviate the ambiguity in scale selection. Extensive experiments demonstrate that our method achieves the state-of-the-art performance on both synthetic and real-world datasets, particularly in scenarios contaminated by noise. Our implementation is available at https://github.com/YingruiWoo/CMG-Net_Pytorch.
Dimensionality Reduced Antenna Array for Beamforming/steering
Oct 28, 2022



Beamforming makes possible a focused communication method. It is extensively employed in many disciplines involving electromagnetic waves, including arrayed ultrasonic, optical, and high-speed wireless communication. Conventional beam steering often requires the addition of separate active amplitude phase control units after each radiating element. The high power consumption and complexity of large-scale phased arrays can be overcome by reducing the number of active controllers, pushing beamforming into satellite communications and deep space exploration. Here, we suggest a brand-new design for a phased array antenna with a dimension reduced cascaded angle offset (DRCAO-PAA). Furthermore, the suggested DRCAO-PAA was compressed by using the concept of singular value deposition. To pave the way for practical application the particle swarm optimization algorithm and deep neural network Transformer were adopted. Based on this theoretical framework, an experimental board was built to verify the theory. Finally, the 16/8/4 -array beam steering was demonstrated by using 4/3/2 active controllers, respectively.
GraphFit: Learning Multi-scale Graph-Convolutional Representation for Point Cloud Normal Estimation
Jul 23, 2022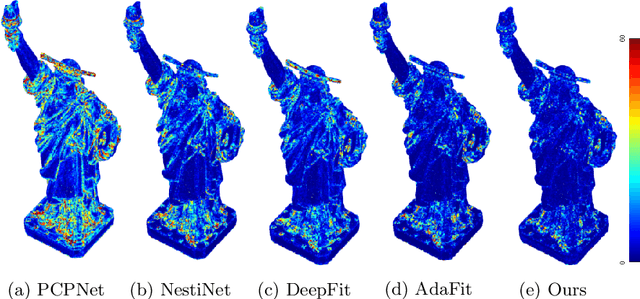
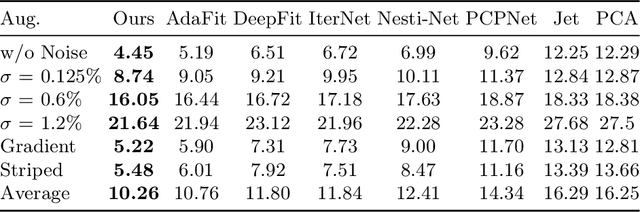
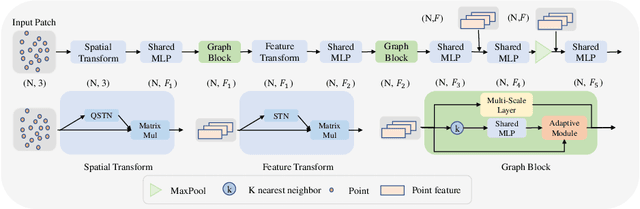
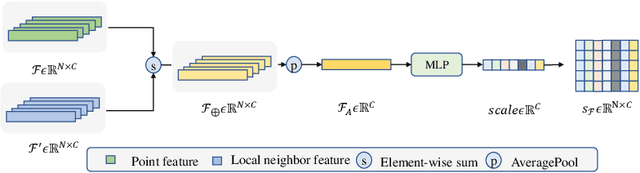
We propose a precise and efficient normal estimation method that can deal with noise and nonuniform density for unstructured 3D point clouds. Unlike existing approaches that directly take patches and ignore the local neighborhood relationships, which make them susceptible to challenging regions such as sharp edges, we propose to learn graph convolutional feature representation for normal estimation, which emphasizes more local neighborhood geometry and effectively encodes intrinsic relationships. Additionally, we design a novel adaptive module based on the attention mechanism to integrate point features with their neighboring features, hence further enhancing the robustness of the proposed normal estimator against point density variations. To make it more distinguishable, we introduce a multi-scale architecture in the graph block to learn richer geometric features. Our method outperforms competitors with the state-of-the-art accuracy on various benchmark datasets, and is quite robust against noise, outliers, as well as the density variations.