 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving language models by retrieving from trillions of tokens
Jan 11, 2022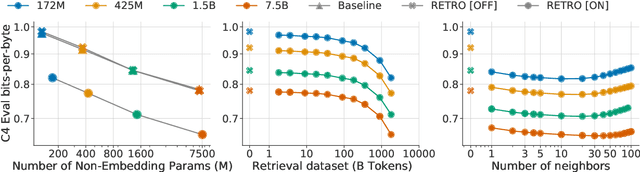

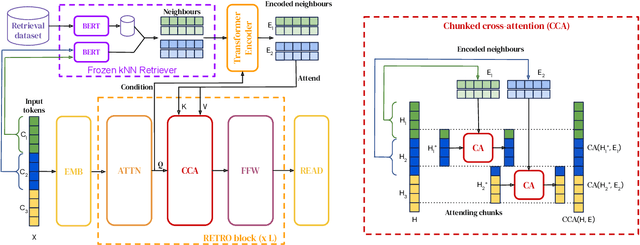

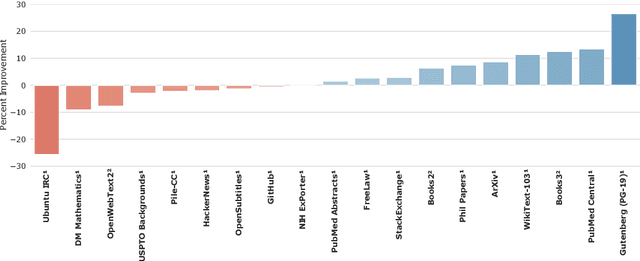
We enhance auto-regressive language models by conditioning on document chunks retrieved from a large corpus, based on local similarity with preceding tokens. With a $2$ trillion token database, our Retrieval-Enhanced Transformer (RETRO) obtains comparable performance to GPT-3 and Jurassic-1 on the Pile, despite using 25$\times$ fewer parameters. After fine-tuning, RETRO performance translates to downstream knowledge-intensive tasks such as question answering. RETRO combines a frozen Bert retriever, a differentiable encoder and a chunked cross-attention mechanism to predict tokens based on an order of magnitude more data than what is typically consumed during training. We typically train RETRO from scratch, yet can also rapidly RETROfit pre-trained transformers with retrieval and still achieve good performance. Our work opens up new avenues for improving language models through explicit memory at unprecedented scale.
Scaling Language Models: Methods, Analysis & Insights from Training Gopher
Dec 08, 2021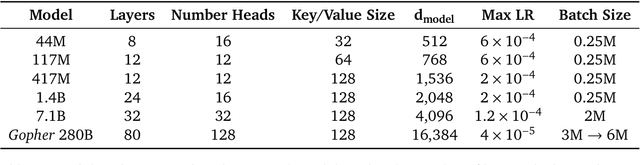
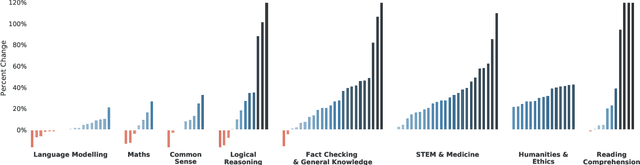
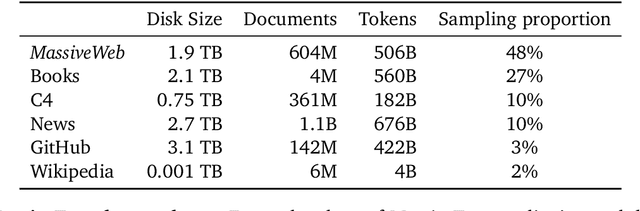
Language modelling provides a step towards intelligent communication systems by harnessing large repositories of written human knowledge to better predict and understand the world. In this paper, we present an analysis of Transformer-based language model performance across a wide range of model scales -- from models with tens of millions of parameters up to a 280 billion parameter model called Gopher. These models are evaluated on 152 diverse tasks, achieving state-of-the-art performance across the majority. Gains from scale are largest in areas such as reading comprehension, fact-checking, and the identification of toxic language, but logical and mathematical reasoning see less benefit. We provide a holistic analysis of the training dataset and model's behaviour, covering the intersection of model scale with bias and toxicity. Finally we discuss the application of language models to AI safety and the mitigation of downstream harms.
Muesli: Combining Improvements in Policy Optimization
Apr 13, 2021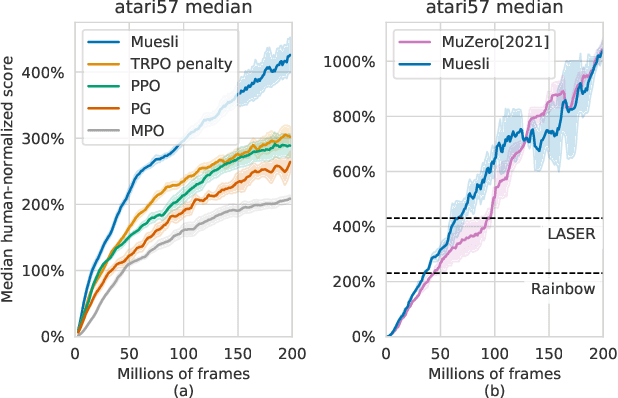
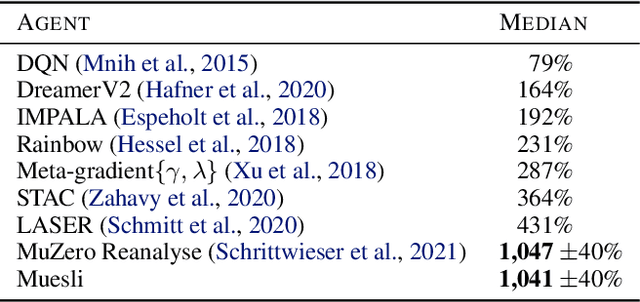
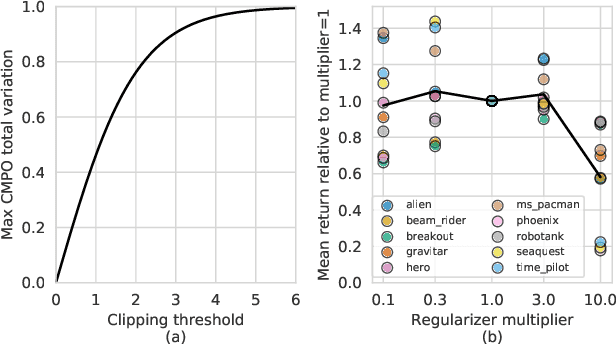
We propose a novel policy update that combines regularized policy optimization with model learning as an auxiliary loss. The update (henceforth Muesli) matches MuZero's state-of-the-art performance on Atari. Notably, Muesli does so without using deep search: it acts directly with a policy network and has computation speed comparable to model-free baselines. The Atari results are complemented by extensive ablations, and by additional results on continuous control and 9x9 Go.
Machine Translation Decoding beyond Beam Search
Apr 12, 2021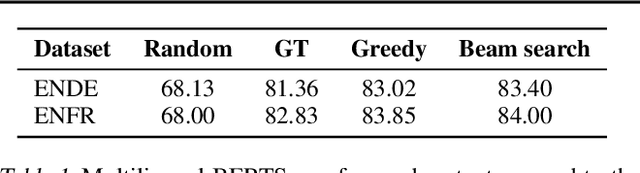
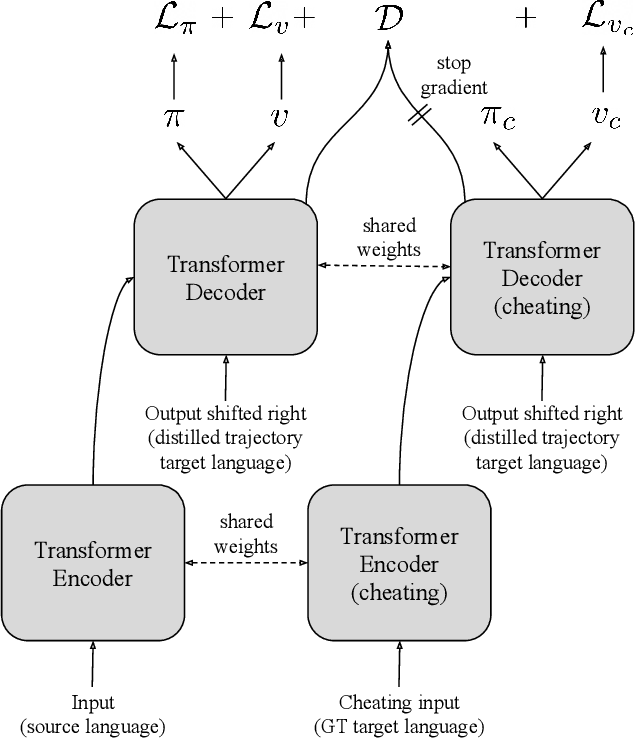
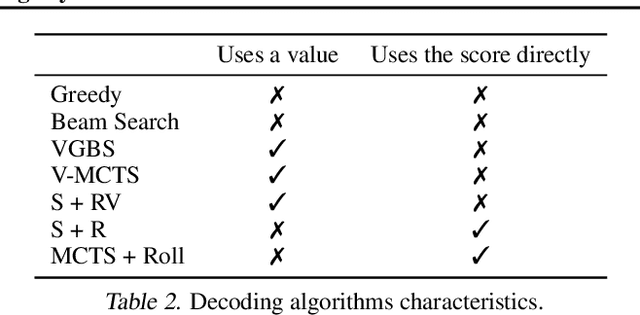
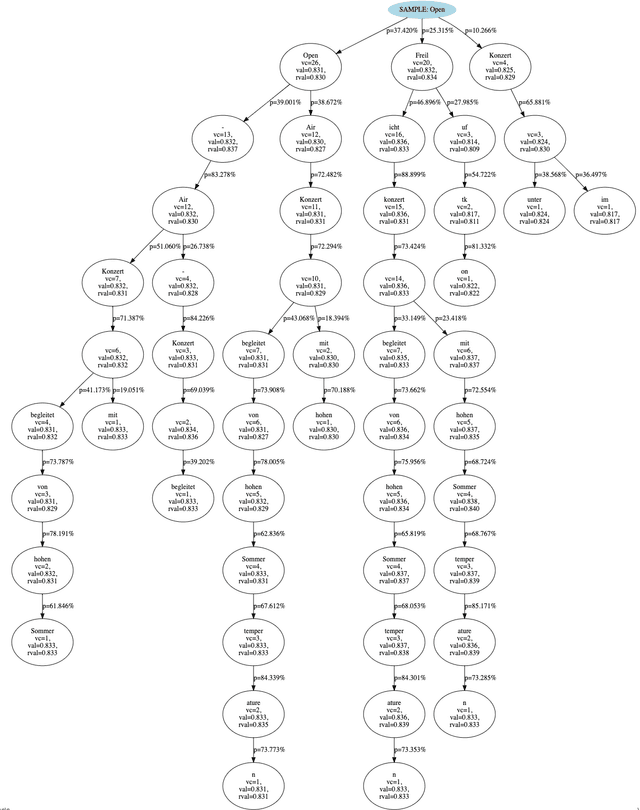
Beam search is the go-to method for decoding auto-regressive machine translation models. While it yields consistent improvements in terms of BLEU, it is only concerned with finding outputs with high model likelihood, and is thus agnostic to whatever end metric or score practitioners care about. Our aim is to establish whether beam search can be replaced by a more powerful metric-driven search technique. To this end, we explore numerous decoding algorithms, including some which rely on a value function parameterised by a neural network, and report results on a variety of metrics. Notably, we introduce a Monte-Carlo Tree Search (MCTS) based method and showcase its competitiveness. We provide a blueprint for how to use MCTS fruitfully in language applications, which opens promising future directions. We find that which algorithm is best heavily depends on the characteristics of the goal metric; we believe that our extensive experiments and analysis will inform further research in this area.
Mastering Atari, Go, Chess and Shogi by Planning with a Learned Model
Nov 19, 2019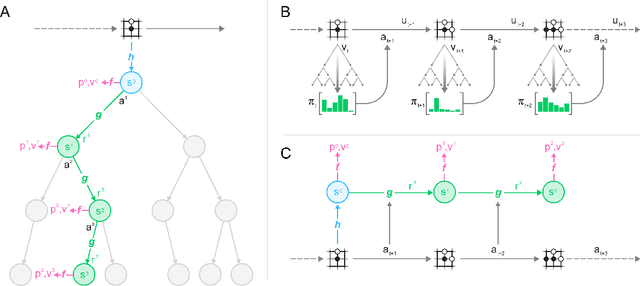
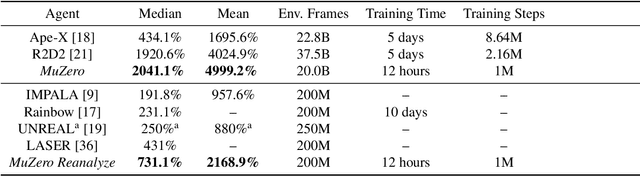
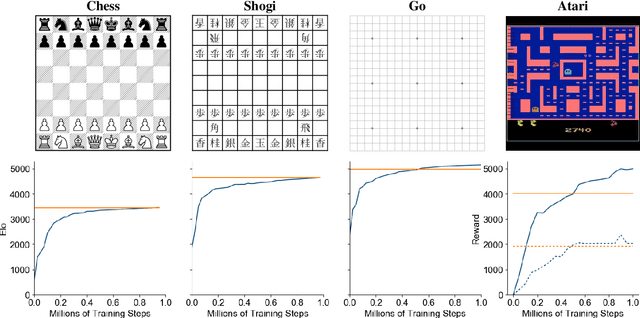
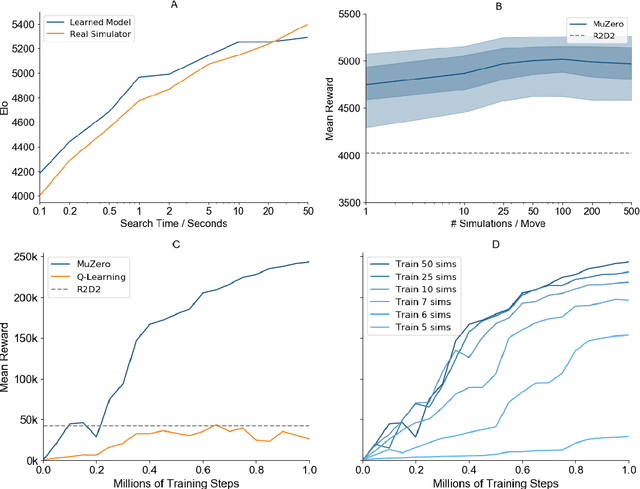
Constructing agents with planning capabilities has long been one of the main challenges in the pursuit of artificial intelligence. Tree-based planning methods have enjoyed huge success in challenging domains, such as chess and Go, where a perfect simulator is available. However, in real-world problems the dynamics governing the environment are often complex and unknown. In this work we present the MuZero algorithm which, by combining a tree-based search with a learned model, achieves superhuman performance in a range of challenging and visually complex domains, without any knowledge of their underlying dynamics. MuZero learns a model that, when applied iteratively, predicts the quantities most directly relevant to planning: the reward, the action-selection policy, and the value function. When evaluated on 57 different Atari games - the canonical video game environment for testing AI techniques, in which model-based planning approaches have historically struggled - our new algorithm achieved a new state of the art. When evaluated on Go, chess and shogi, without any knowledge of the game rules, MuZero matched the superhuman performance of the AlphaZero algorithm that was supplied with the game rules.
Mastering Chess and Shogi by Self-Play with a General Reinforcement Learning Algorithm
Dec 05, 2017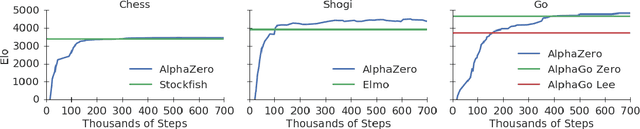
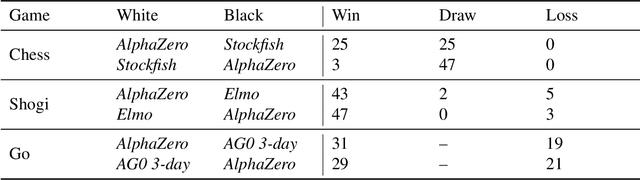
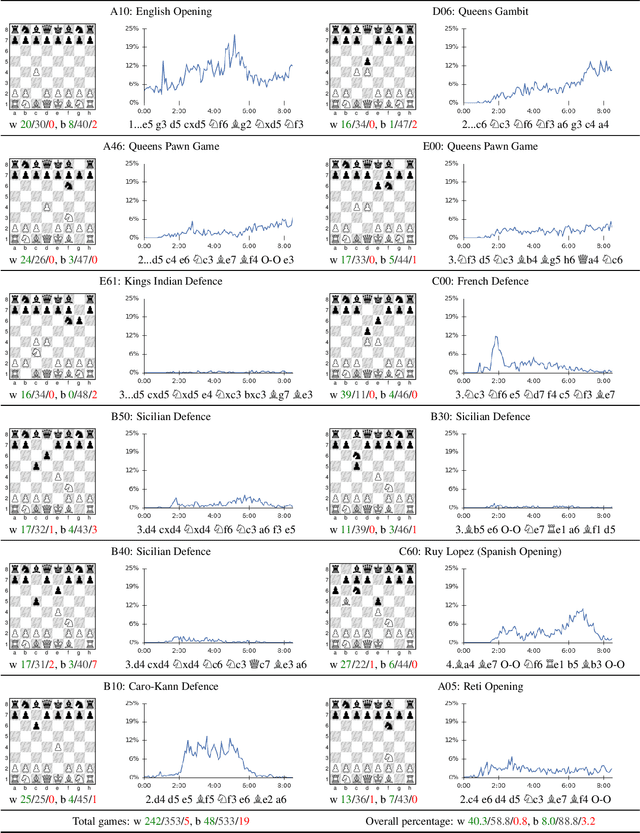
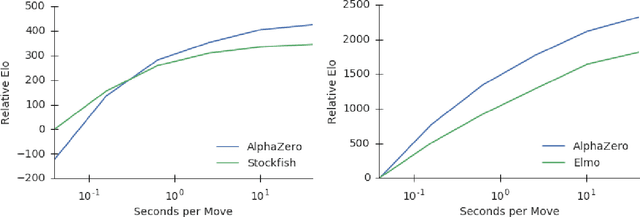
The game of chess is the most widely-studied domain in the history of artificial intelligence. The strongest programs are based on a combination of sophisticated search techniques, domain-specific adaptations, and handcrafted evaluation functions that have been refined by human experts over several decades. In contrast, the AlphaGo Zero program recently achieved superhuman performance in the game of Go, by tabula rasa reinforcement learning from games of self-play. In this paper, we generalise this approach into a single AlphaZero algorithm that can achieve, tabula rasa, superhuman performance in many challenging domains. Starting from random play, and given no domain knowledge except the game rules, AlphaZero achieved within 24 hours a superhuman level of play in the games of chess and shogi (Japanese chess) as well as Go, and convincingly defeated a world-champion program in each case.
Learning to Navigate in Complex Environments
Jan 13, 2017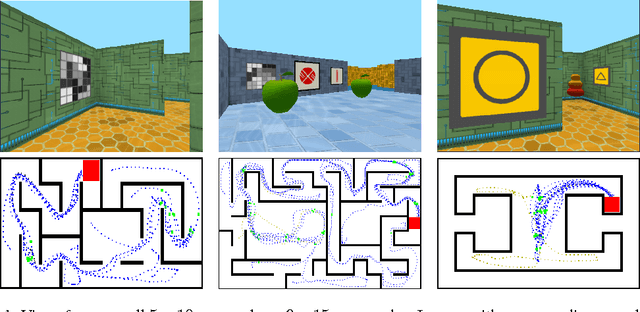
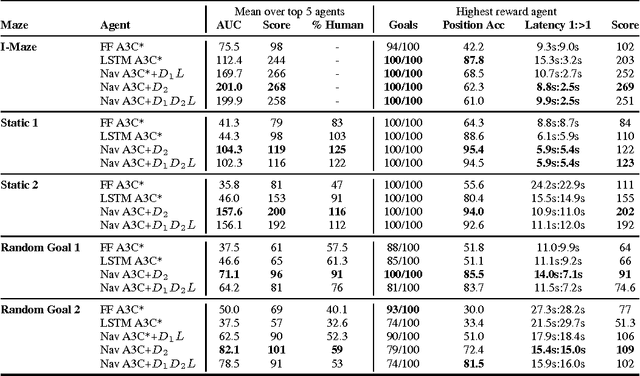
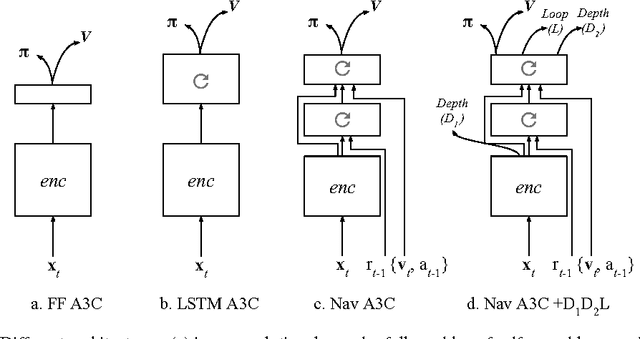
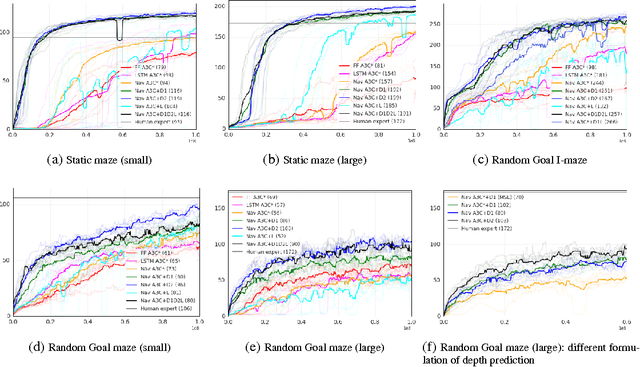
Learning to navigate in complex environments with dynamic elements is an important milestone in developing AI agents. In this work we formulate the navigation question as a reinforcement learning problem and show that data efficiency and task performance can be dramatically improved by relying on additional auxiliary tasks leveraging multimodal sensory inputs. In particular we consider jointly learning the goal-driven reinforcement learning problem with auxiliary depth prediction and loop closure classification tasks. This approach can learn to navigate from raw sensory input in complicated 3D mazes, approaching human-level performance even under conditions where the goal location changes frequently. We provide detailed analysis of the agent behaviour, its ability to localise, and its network activity dynamics, showing that the agent implicitly learns key navigation abilities.
Generic Deep Networks with Wavelet Scattering
Mar 10, 2014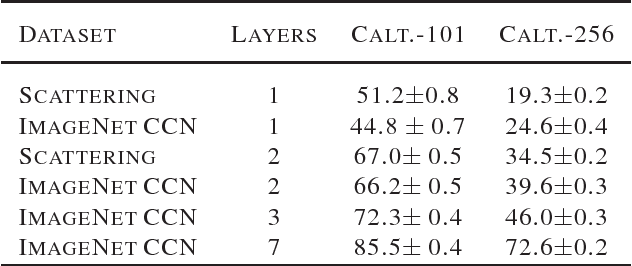
We introduce a two-layer wavelet scattering network, for object classification. This scattering transform computes a spatial wavelet transform on the first layer and a new joint wavelet transform along spatial, angular and scale variables in the second layer. Numerical experiments demonstrate that this two layer convolution network, which involves no learning and no max pooling, performs efficiently on complex image data sets such as CalTech, with structural objects variability and clutter. It opens the possibility to simplify deep neural network learning by initializing the first layers with wavelet filters.