 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMastering the Game of Stratego with Model-Free Multiagent Reinforcement Learning
Jun 30, 2022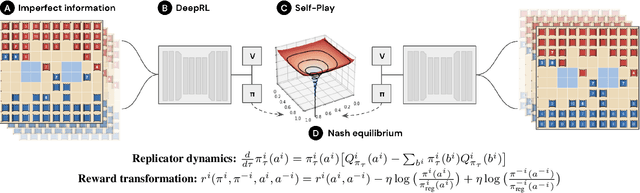
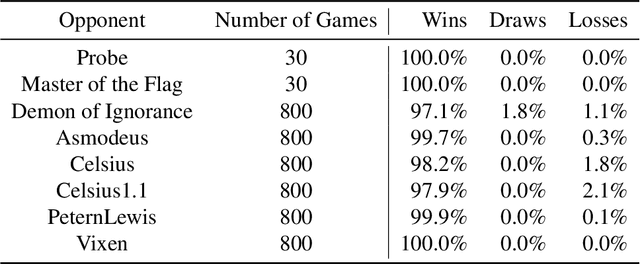
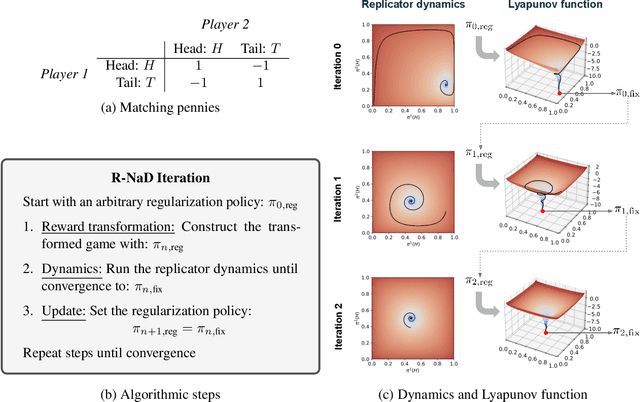
We introduce DeepNash, an autonomous agent capable of learning to play the imperfect information game Stratego from scratch, up to a human expert level. Stratego is one of the few iconic board games that Artificial Intelligence (AI) has not yet mastered. This popular game has an enormous game tree on the order of $10^{535}$ nodes, i.e., $10^{175}$ times larger than that of Go. It has the additional complexity of requiring decision-making under imperfect information, similar to Texas hold'em poker, which has a significantly smaller game tree (on the order of $10^{164}$ nodes). Decisions in Stratego are made over a large number of discrete actions with no obvious link between action and outcome. Episodes are long, with often hundreds of moves before a player wins, and situations in Stratego can not easily be broken down into manageably-sized sub-problems as in poker. For these reasons, Stratego has been a grand challenge for the field of AI for decades, and existing AI methods barely reach an amateur level of play. DeepNash uses a game-theoretic, model-free deep reinforcement learning method, without search, that learns to master Stratego via self-play. The Regularised Nash Dynamics (R-NaD) algorithm, a key component of DeepNash, converges to an approximate Nash equilibrium, instead of 'cycling' around it, by directly modifying the underlying multi-agent learning dynamics. DeepNash beats existing state-of-the-art AI methods in Stratego and achieved a yearly (2022) and all-time top-3 rank on the Gravon games platform, competing with human expert players.
A data-driven approach for learning to control computers
Feb 16, 2022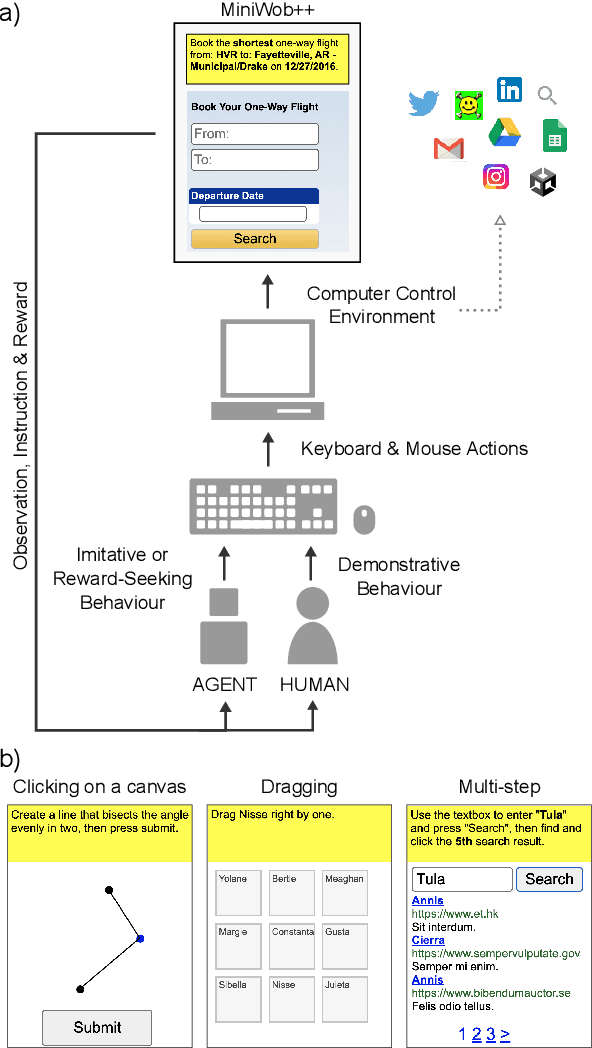
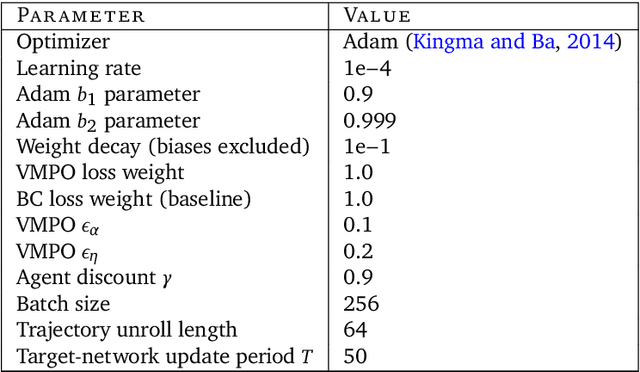
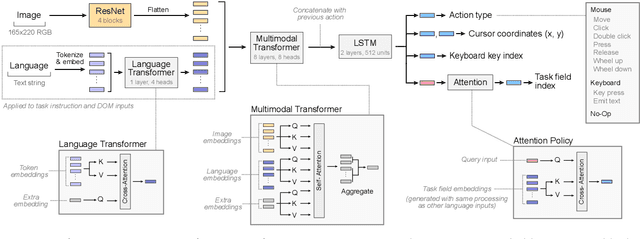
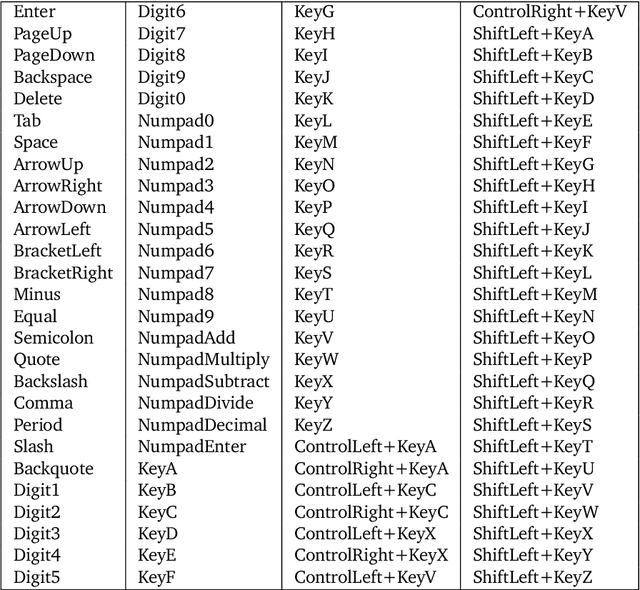
It would be useful for machines to use computers as humans do so that they can aid us in everyday tasks. This is a setting in which there is also the potential to leverage large-scale expert demonstrations and human judgements of interactive behaviour, which are two ingredients that have driven much recent success in AI. Here we investigate the setting of computer control using keyboard and mouse, with goals specified via natural language. Instead of focusing on hand-designed curricula and specialized action spaces, we focus on developing a scalable method centered on reinforcement learning combined with behavioural priors informed by actual human-computer interactions. We achieve state-of-the-art and human-level mean performance across all tasks within the MiniWob++ benchmark, a challenging suite of computer control problems, and find strong evidence of cross-task transfer. These results demonstrate the usefulness of a unified human-agent interface when training machines to use computers. Altogether our results suggest a formula for achieving competency beyond MiniWob++ and towards controlling computers, in general, as a human would.
Scaling Language Models: Methods, Analysis & Insights from Training Gopher
Dec 08, 2021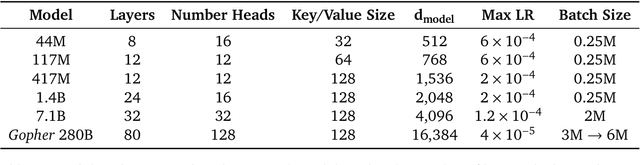
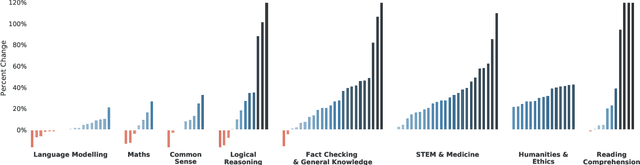
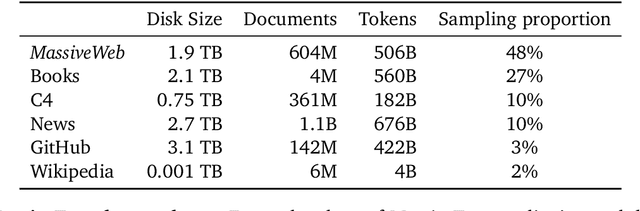
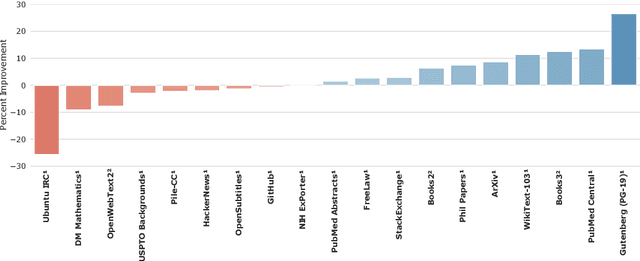
Language modelling provides a step towards intelligent communication systems by harnessing large repositories of written human knowledge to better predict and understand the world. In this paper, we present an analysis of Transformer-based language model performance across a wide range of model scales -- from models with tens of millions of parameters up to a 280 billion parameter model called Gopher. These models are evaluated on 152 diverse tasks, achieving state-of-the-art performance across the majority. Gains from scale are largest in areas such as reading comprehension, fact-checking, and the identification of toxic language, but logical and mathematical reasoning see less benefit. We provide a holistic analysis of the training dataset and model's behaviour, covering the intersection of model scale with bias and toxicity. Finally we discuss the application of language models to AI safety and the mitigation of downstream harms.
Neural Predictive Belief Representations
Nov 15, 2018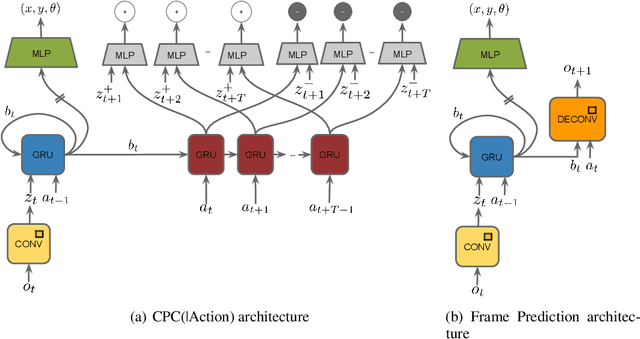
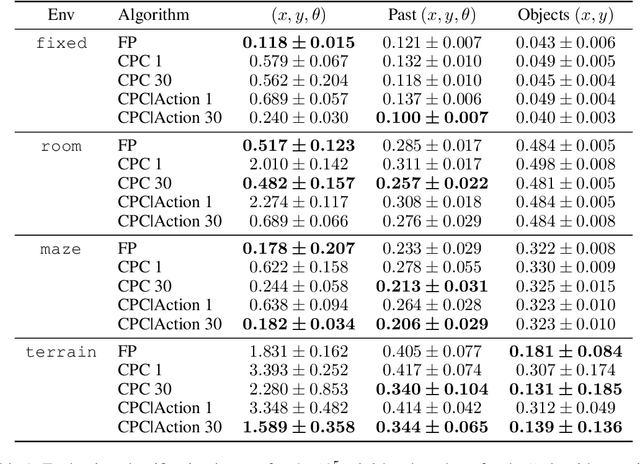
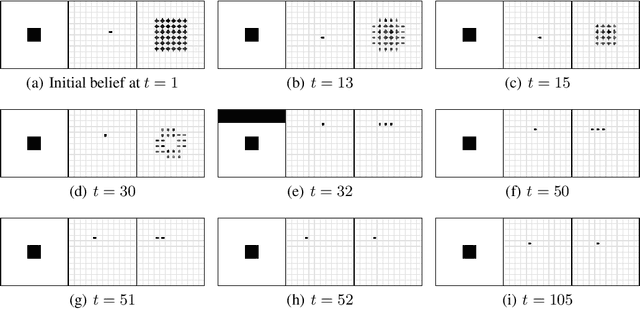
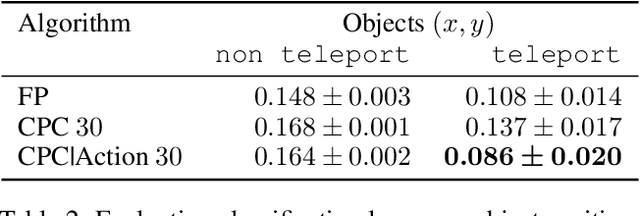
Unsupervised representation learning has succeeded with excellent results in many applications. It is an especially powerful tool to learn a good representation of environments with partial or noisy observations. In partially observable domains it is important for the representation to encode a belief state, a sufficient statistic of the observations seen so far. In this paper, we investigate whether it is possible to learn such a belief representation using modern neural architectures. Specifically, we focus on one-step frame prediction and two variants of contrastive predictive coding (CPC) as the objective functions to learn the representations. To evaluate these learned representations, we test how well they can predict various pieces of information about the underlying state of the environment, e.g., position of the agent in a 3D maze. We show that all three methods are able to learn belief representations of the environment, they encode not only the state information, but also its uncertainty, a crucial aspect of belief states. We also find that for CPC multi-step predictions and action-conditioning are critical for accurate belief representations in visually complex environments. The ability of neural representations to capture the belief information has the potential to spur new advances for learning and planning in partially observable domains, where leveraging uncertainty is essential for optimal decision making.