 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStyleDrop: Text-to-Image Generation in Any Style
Jun 01, 2023



Pre-trained large text-to-image models synthesize impressive images with an appropriate use of text prompts. However, ambiguities inherent in natural language and out-of-distribution effects make it hard to synthesize image styles, that leverage a specific design pattern, texture or material. In this paper, we introduce StyleDrop, a method that enables the synthesis of images that faithfully follow a specific style using a text-to-image model. The proposed method is extremely versatile and captures nuances and details of a user-provided style, such as color schemes, shading, design patterns, and local and global effects. It efficiently learns a new style by fine-tuning very few trainable parameters (less than $1\%$ of total model parameters) and improving the quality via iterative training with either human or automated feedback. Better yet, StyleDrop is able to deliver impressive results even when the user supplies only a single image that specifies the desired style. An extensive study shows that, for the task of style tuning text-to-image models, StyleDrop implemented on Muse convincingly outperforms other methods, including DreamBooth and textual inversion on Imagen or Stable Diffusion. More results are available at our project website: https://styledrop.github.io
DPOK: Reinforcement Learning for Fine-tuning Text-to-Image Diffusion Models
May 25, 2023



Learning from human feedback has been shown to improve text-to-image models. These techniques first learn a reward function that captures what humans care about in the task and then improve the models based on the learned reward function. Even though relatively simple approaches (e.g., rejection sampling based on reward scores) have been investigated, fine-tuning text-to-image models with the reward function remains challenging. In this work, we propose using online reinforcement learning (RL) to fine-tune text-to-image models. We focus on diffusion models, defining the fine-tuning task as an RL problem, and updating the pre-trained text-to-image diffusion models using policy gradient to maximize the feedback-trained reward. Our approach, coined DPOK, integrates policy optimization with KL regularization. We conduct an analysis of KL regularization for both RL fine-tuning and supervised fine-tuning. In our experiments, we show that DPOK is generally superior to supervised fine-tuning with respect to both image-text alignment and image quality.
Preference Transformer: Modeling Human Preferences using Transformers for RL
Mar 02, 2023Preference-based reinforcement learning (RL) provides a framework to train agents using human preferences between two behaviors. However, preference-based RL has been challenging to scale since it requires a large amount of human feedback to learn a reward function aligned with human intent. In this paper, we present Preference Transformer, a neural architecture that models human preferences using transformers. Unlike prior approaches assuming human judgment is based on the Markovian rewards which contribute to the decision equally, we introduce a new preference model based on the weighted sum of non-Markovian rewards. We then design the proposed preference model using a transformer architecture that stacks causal and bidirectional self-attention layers. We demonstrate that Preference Transformer can solve a variety of control tasks using real human preferences, while prior approaches fail to work. We also show that Preference Transformer can induce a well-specified reward and attend to critical events in the trajectory by automatically capturing the temporal dependencies in human decision-making. Code is available on the project website: https://sites.google.com/view/preference-transformer.
Aligning Text-to-Image Models using Human Feedback
Feb 23, 2023



Deep generative models have shown impressive results in text-to-image synthesis. However, current text-to-image models often generate images that are inadequately aligned with text prompts. We propose a fine-tuning method for aligning such models using human feedback, comprising three stages. First, we collect human feedback assessing model output alignment from a set of diverse text prompts. We then use the human-labeled image-text dataset to train a reward function that predicts human feedback. Lastly, the text-to-image model is fine-tuned by maximizing reward-weighted likelihood to improve image-text alignment. Our method generates objects with specified colors, counts and backgrounds more accurately than the pre-trained model. We also analyze several design choices and find that careful investigations on such design choices are important in balancing the alignment-fidelity tradeoffs. Our results demonstrate the potential for learning from human feedback to significantly improve text-to-image models.
Controllability-Aware Unsupervised Skill Discovery
Feb 13, 2023One of the key capabilities of intelligent agents is the ability to discover useful skills without external supervision. However, the current unsupervised skill discovery methods are often limited to acquiring simple, easy-to-learn skills due to the lack of incentives to discover more complex, challenging behaviors. We introduce a novel unsupervised skill discovery method, Controllability-aware Skill Discovery (CSD), which actively seeks complex, hard-to-control skills without supervision. The key component of CSD is a controllability-aware distance function, which assigns larger values to state transitions that are harder to achieve with the current skills. Combined with distance-maximizing skill discovery, CSD progressively learns more challenging skills over the course of training as our jointly trained distance function reduces rewards for easy-to-achieve skills. Our experimental results in six robotic manipulation and locomotion environments demonstrate that CSD can discover diverse complex skills including object manipulation and locomotion skills with no supervision, significantly outperforming prior unsupervised skill discovery methods. Videos and code are available at https://seohong.me/projects/csd/
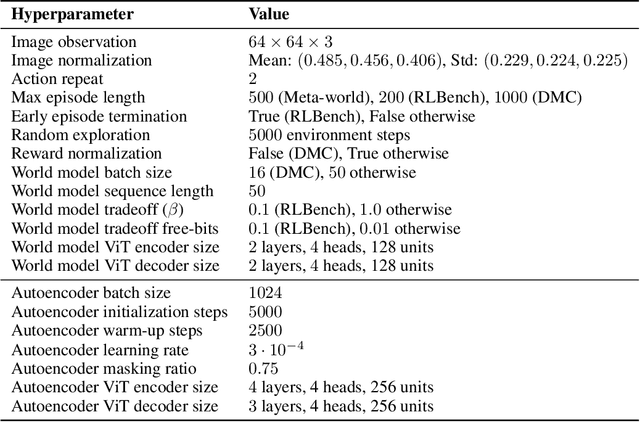
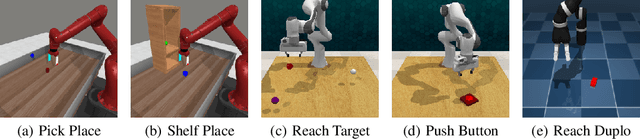
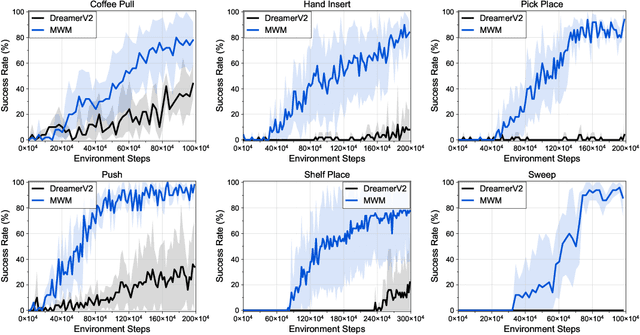
Multi-View Masked World Models for Visual Robotic Manipulation
Feb 05, 2023



Visual robotic manipulation research and applications often use multiple cameras, or views, to better perceive the world. How else can we utilize the richness of multi-view data? In this paper, we investigate how to learn good representations with multi-view data and utilize them for visual robotic manipulation. Specifically, we train a multi-view masked autoencoder which reconstructs pixels of randomly masked viewpoints and then learn a world model operating on the representations from the autoencoder. We demonstrate the effectiveness of our method in a range of scenarios, including multi-view control and single-view control with auxiliary cameras for representation learning. We also show that the multi-view masked autoencoder trained with multiple randomized viewpoints enables training a policy with strong viewpoint randomization and transferring the policy to solve real-robot tasks without camera calibration and an adaptation procedure. Videos demonstrations in real-world experiments and source code are available at the project website: https://sites.google.com/view/mv-mwm.
Instruction-Following Agents with Jointly Pre-Trained Vision-Language Models
Oct 24, 2022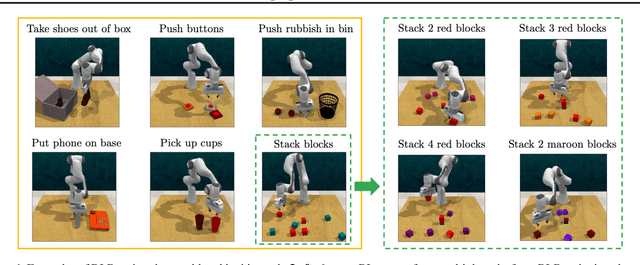
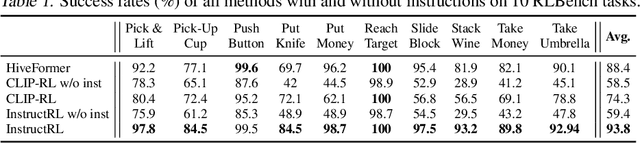
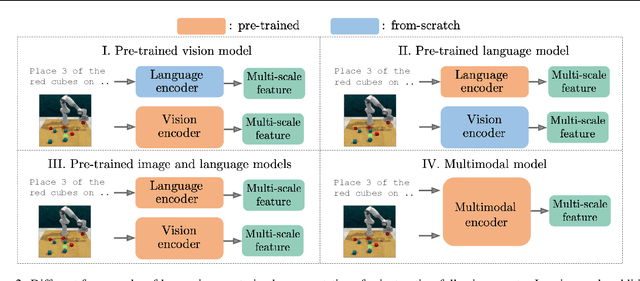

Humans are excellent at understanding language and vision to accomplish a wide range of tasks. In contrast, creating general instruction-following embodied agents remains a difficult challenge. Prior work that uses pure language-only models lack visual grounding, making it difficult to connect language instructions with visual observations. On the other hand, methods that use pre-trained vision-language models typically come with divided language and visual representations, requiring designing specialized network architecture to fuse them together. We propose a simple yet effective model for robots to solve instruction-following tasks in vision-based environments. Our \ours method consists of a multimodal transformer that encodes visual observations and language instructions, and a policy transformer that predicts actions based on encoded representations. The multimodal transformer is pre-trained on millions of image-text pairs and natural language text, thereby producing generic cross-modal representations of observations and instructions. The policy transformer keeps track of the full history of observations and actions, and predicts actions autoregressively. We show that this unified transformer model outperforms all state-of-the-art pre-trained or trained-from-scratch methods in both single-task and multi-task settings. Our model also shows better model scalability and generalization ability than prior work.
HARP: Autoregressive Latent Video Prediction with High-Fidelity Image Generator
Sep 15, 2022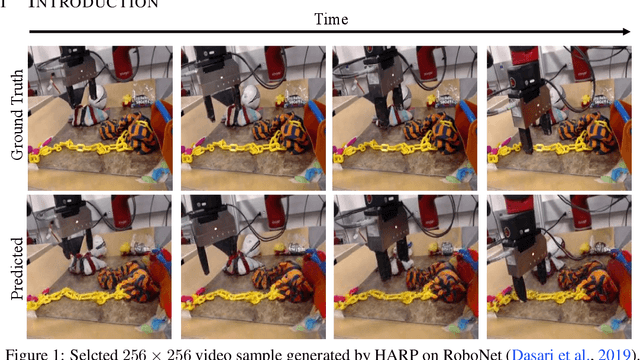
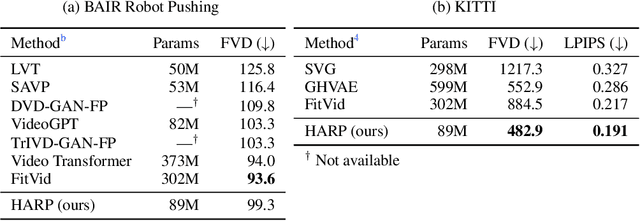
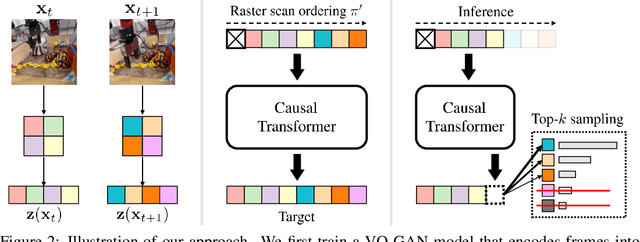
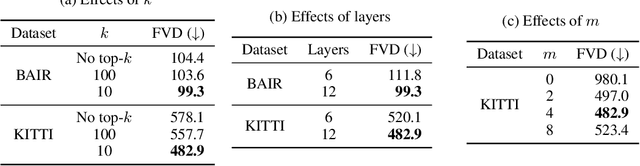
Video prediction is an important yet challenging problem; burdened with the tasks of generating future frames and learning environment dynamics. Recently, autoregressive latent video models have proved to be a powerful video prediction tool, by separating the video prediction into two sub-problems: pre-training an image generator model, followed by learning an autoregressive prediction model in the latent space of the image generator. However, successfully generating high-fidelity and high-resolution videos has yet to be seen. In this work, we investigate how to train an autoregressive latent video prediction model capable of predicting high-fidelity future frames with minimal modification to existing models, and produce high-resolution (256x256) videos. Specifically, we scale up prior models by employing a high-fidelity image generator (VQ-GAN) with a causal transformer model, and introduce additional techniques of top-k sampling and data augmentation to further improve video prediction quality. Despite the simplicity, the proposed method achieves competitive performance to state-of-the-art approaches on standard video prediction benchmarks with fewer parameters, and enables high-resolution video prediction on complex and large-scale datasets. Videos are available at https://sites.google.com/view/harp-videos/home.
Masked World Models for Visual Control
Jun 28, 2022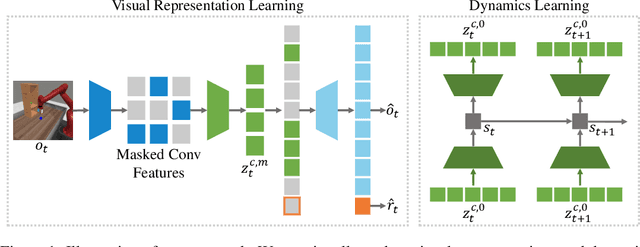
Visual model-based reinforcement learning (RL) has the potential to enable sample-efficient robot learning from visual observations. Yet the current approaches typically train a single model end-to-end for learning both visual representations and dynamics, making it difficult to accurately model the interaction between robots and small objects. In this work, we introduce a visual model-based RL framework that decouples visual representation learning and dynamics learning. Specifically, we train an autoencoder with convolutional layers and vision transformers (ViT) to reconstruct pixels given masked convolutional features, and learn a latent dynamics model that operates on the representations from the autoencoder. Moreover, to encode task-relevant information, we introduce an auxiliary reward prediction objective for the autoencoder. We continually update both autoencoder and dynamics model using online samples collected from environment interaction. We demonstrate that our decoupling approach achieves state-of-the-art performance on a variety of visual robotic tasks from Meta-world and RLBench, e.g., we achieve 81.7% success rate on 50 visual robotic manipulation tasks from Meta-world, while the baseline achieves 67.9%. Code is available on the project website: https://sites.google.com/view/mwm-rl.
Reward Uncertainty for Exploration in Preference-based Reinforcement Learning
May 24, 2022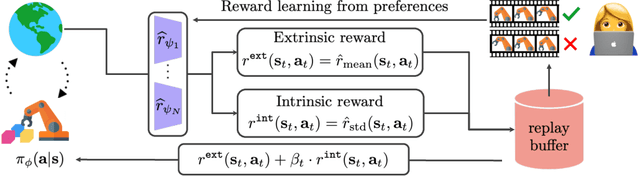


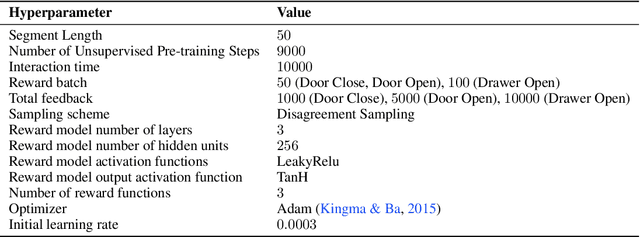
Conveying complex objectives to reinforcement learning (RL) agents often requires meticulous reward engineering. Preference-based RL methods are able to learn a more flexible reward model based on human preferences by actively incorporating human feedback, i.e. teacher's preferences between two clips of behaviors. However, poor feedback-efficiency still remains a problem in current preference-based RL algorithms, as tailored human feedback is very expensive. To handle this issue, previous methods have mainly focused on improving query selection and policy initialization. At the same time, recent exploration methods have proven to be a recipe for improving sample-efficiency in RL. We present an exploration method specifically for preference-based RL algorithms. Our main idea is to design an intrinsic reward by measuring the novelty based on learned reward. Specifically, we utilize disagreement across ensemble of learned reward models. Our intuition is that disagreement in learned reward model reflects uncertainty in tailored human feedback and could be useful for exploration. Our experiments show that exploration bonus from uncertainty in learned reward improves both feedback- and sample-efficiency of preference-based RL algorithms on complex robot manipulation tasks from MetaWorld benchmarks, compared with other existing exploration methods that measure the novelty of state visitation.