 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisionTrim: Unified Vision Token Compression for Training-Free MLLM Acceleration
Jan 30, 2026Multimodal large language models (MLLMs) suffer from high computational costs due to excessive visual tokens, particularly in high-resolution and video-based scenarios. Existing token reduction methods typically focus on isolated pipeline components and often neglect textual alignment, leading to performance degradation. In this paper, we propose VisionTrim, a unified framework for training-free MLLM acceleration, integrating two effective plug-and-play modules: 1) the Dominant Vision Token Selection (DVTS) module, which preserves essential visual tokens via a global-local view, and 2) the Text-Guided Vision Complement (TGVC) module, which facilitates context-aware token merging guided by textual cues. Extensive experiments across diverse image and video multimodal benchmarks demonstrate the performance superiority of our VisionTrim, advancing practical MLLM deployment in real-world applications. The code is available at: https://github.com/hanxunyu/VisionTrim.
Interp3D: Correspondence-aware Interpolation for Generative Textured 3D Morphing
Jan 20, 2026Textured 3D morphing seeks to generate smooth and plausible transitions between two 3D assets, preserving both structural coherence and fine-grained appearance. This ability is crucial not only for advancing 3D generation research but also for practical applications in animation, editing, and digital content creation. Existing approaches either operate directly on geometry, limiting them to shape-only morphing while neglecting textures, or extend 2D interpolation strategies into 3D, which often causes semantic ambiguity, structural misalignment, and texture blurring. These challenges underscore the necessity to jointly preserve geometric consistency, texture alignment, and robustness throughout the transition process. To address this, we propose Interp3D, a novel training-free framework for textured 3D morphing. It harnesses generative priors and adopts a progressive alignment principle to ensure both geometric fidelity and texture coherence. Starting from semantically aligned interpolation in condition space, Interp3D enforces structural consistency via SLAT (Structured Latent)-guided structure interpolation, and finally transfers appearance details through fine-grained texture fusion. For comprehensive evaluations, we construct a dedicated dataset, Interp3DData, with graded difficulty levels and assess generation results from fidelity, transition smoothness, and plausibility. Both quantitative metrics and human studies demonstrate the significant advantages of our proposed approach over previous methods. Source code is available at https://github.com/xiaolul2/Interp3D.
Forging Spatial Intelligence: A Roadmap of Multi-Modal Data Pre-Training for Autonomous Systems
Dec 30, 2025The rapid advancement of autonomous systems, including self-driving vehicles and drones, has intensified the need to forge true Spatial Intelligence from multi-modal onboard sensor data. While foundation models excel in single-modal contexts, integrating their capabilities across diverse sensors like cameras and LiDAR to create a unified understanding remains a formidable challenge. This paper presents a comprehensive framework for multi-modal pre-training, identifying the core set of techniques driving progress toward this goal. We dissect the interplay between foundational sensor characteristics and learning strategies, evaluating the role of platform-specific datasets in enabling these advancements. Our central contribution is the formulation of a unified taxonomy for pre-training paradigms: ranging from single-modality baselines to sophisticated unified frameworks that learn holistic representations for advanced tasks like 3D object detection and semantic occupancy prediction. Furthermore, we investigate the integration of textual inputs and occupancy representations to facilitate open-world perception and planning. Finally, we identify critical bottlenecks, such as computational efficiency and model scalability, and propose a roadmap toward general-purpose multi-modal foundation models capable of achieving robust Spatial Intelligence for real-world deployment.
Vision-Language-Action Models for Autonomous Driving: Past, Present, and Future
Dec 18, 2025Autonomous driving has long relied on modular "Perception-Decision-Action" pipelines, where hand-crafted interfaces and rule-based components often break down in complex or long-tailed scenarios. Their cascaded design further propagates perception errors, degrading downstream planning and control. Vision-Action (VA) models address some limitations by learning direct mappings from visual inputs to actions, but they remain opaque, sensitive to distribution shifts, and lack structured reasoning or instruction-following capabilities. Recent progress in Large Language Models (LLMs) and multimodal learning has motivated the emergence of Vision-Language-Action (VLA) frameworks, which integrate perception with language-grounded decision making. By unifying visual understanding, linguistic reasoning, and actionable outputs, VLAs offer a pathway toward more interpretable, generalizable, and human-aligned driving policies. This work provides a structured characterization of the emerging VLA landscape for autonomous driving. We trace the evolution from early VA approaches to modern VLA frameworks and organize existing methods into two principal paradigms: End-to-End VLA, which integrates perception, reasoning, and planning within a single model, and Dual-System VLA, which separates slow deliberation (via VLMs) from fast, safety-critical execution (via planners). Within these paradigms, we further distinguish subclasses such as textual vs. numerical action generators and explicit vs. implicit guidance mechanisms. We also summarize representative datasets and benchmarks for evaluating VLA-based driving systems and highlight key challenges and open directions, including robustness, interpretability, and instruction fidelity. Overall, this work aims to establish a coherent foundation for advancing human-compatible autonomous driving systems.
RewardMap: Tackling Sparse Rewards in Fine-grained Visual Reasoning via Multi-Stage Reinforcement Learning
Oct 02, 2025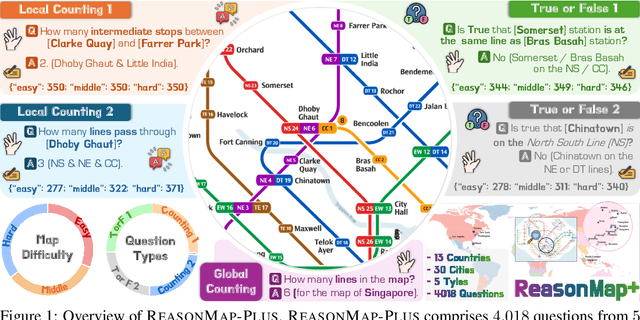
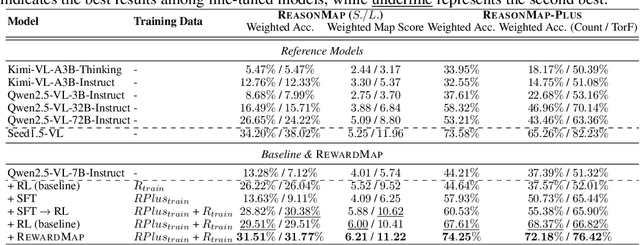
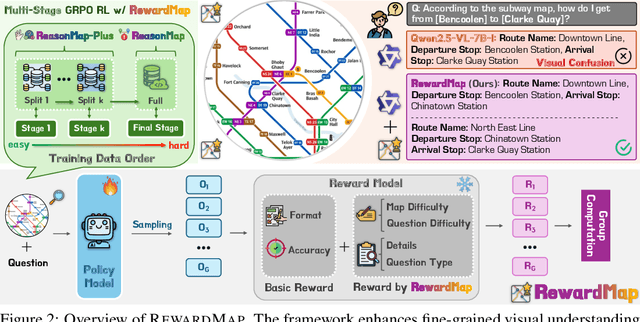
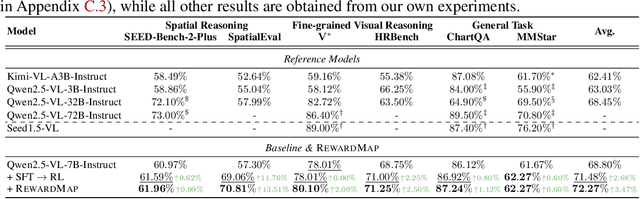
Fine-grained visual reasoning remains a core challenge for multimodal large language models (MLLMs). The recently introduced ReasonMap highlights this gap by showing that even advanced MLLMs struggle with spatial reasoning in structured and information-rich settings such as transit maps, a task of clear practical and scientific importance. However, standard reinforcement learning (RL) on such tasks is impeded by sparse rewards and unstable optimization. To address this, we first construct ReasonMap-Plus, an extended dataset that introduces dense reward signals through Visual Question Answering (VQA) tasks, enabling effective cold-start training of fine-grained visual understanding skills. Next, we propose RewardMap, a multi-stage RL framework designed to improve both visual understanding and reasoning capabilities of MLLMs. RewardMap incorporates two key designs. First, we introduce a difficulty-aware reward design that incorporates detail rewards, directly tackling the sparse rewards while providing richer supervision. Second, we propose a multi-stage RL scheme that bootstraps training from simple perception to complex reasoning tasks, offering a more effective cold-start strategy than conventional Supervised Fine-Tuning (SFT). Experiments on ReasonMap and ReasonMap-Plus demonstrate that each component of RewardMap contributes to consistent performance gains, while their combination yields the best results. Moreover, models trained with RewardMap achieve an average improvement of 3.47% across 6 benchmarks spanning spatial reasoning, fine-grained visual reasoning, and general tasks beyond transit maps, underscoring enhanced visual understanding and reasoning capabilities.
MambaMap: Online Vectorized HD Map Construction using State Space Model
Jul 27, 2025High-definition (HD) maps are essential for autonomous driving, as they provide precise road information for downstream tasks. Recent advances highlight the potential of temporal modeling in addressing challenges like occlusions and extended perception range. However, existing methods either fail to fully exploit temporal information or incur substantial computational overhead in handling extended sequences. To tackle these challenges, we propose MambaMap, a novel framework that efficiently fuses long-range temporal features in the state space to construct online vectorized HD maps. Specifically, MambaMap incorporates a memory bank to store and utilize information from historical frames, dynamically updating BEV features and instance queries to improve robustness against noise and occlusions. Moreover, we introduce a gating mechanism in the state space, selectively integrating dependencies of map elements in high computational efficiency. In addition, we design innovative multi-directional and spatial-temporal scanning strategies to enhance feature extraction at both BEV and instance levels. These strategies significantly boost the prediction accuracy of our approach while ensuring robust temporal consistency. Extensive experiments on the nuScenes and Argoverse2 datasets demonstrate that our proposed MambaMap approach outperforms state-of-the-art methods across various splits and perception ranges. Source code will be available at https://github.com/ZiziAmy/MambaMap.
SAM4D: Segment Anything in Camera and LiDAR Streams
Jun 26, 2025


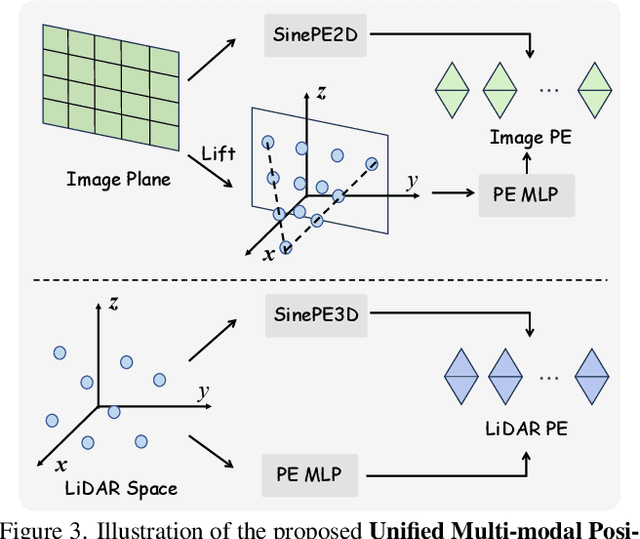
We present SAM4D, a multi-modal and temporal foundation model designed for promptable segmentation across camera and LiDAR streams. Unified Multi-modal Positional Encoding (UMPE) is introduced to align camera and LiDAR features in a shared 3D space, enabling seamless cross-modal prompting and interaction. Additionally, we propose Motion-aware Cross-modal Memory Attention (MCMA), which leverages ego-motion compensation to enhance temporal consistency and long-horizon feature retrieval, ensuring robust segmentation across dynamically changing autonomous driving scenes. To avoid annotation bottlenecks, we develop a multi-modal automated data engine that synergizes VFM-driven video masklets, spatiotemporal 4D reconstruction, and cross-modal masklet fusion. This framework generates camera-LiDAR aligned pseudo-labels at a speed orders of magnitude faster than human annotation while preserving VFM-derived semantic fidelity in point cloud representations. We conduct extensive experiments on the constructed Waymo-4DSeg, which demonstrate the powerful cross-modal segmentation ability and great potential in data annotation of proposed SAM4D.
OmniAvatar: Efficient Audio-Driven Avatar Video Generation with Adaptive Body Animation
Jun 23, 2025Significant progress has been made in audio-driven human animation, while most existing methods focus mainly on facial movements, limiting their ability to create full-body animations with natural synchronization and fluidity. They also struggle with precise prompt control for fine-grained generation. To tackle these challenges, we introduce OmniAvatar, an innovative audio-driven full-body video generation model that enhances human animation with improved lip-sync accuracy and natural movements. OmniAvatar introduces a pixel-wise multi-hierarchical audio embedding strategy to better capture audio features in the latent space, enhancing lip-syncing across diverse scenes. To preserve the capability for prompt-driven control of foundation models while effectively incorporating audio features, we employ a LoRA-based training approach. Extensive experiments show that OmniAvatar surpasses existing models in both facial and semi-body video generation, offering precise text-based control for creating videos in various domains, such as podcasts, human interactions, dynamic scenes, and singing. Our project page is https://omni-avatar.github.io/.
PixelThink: Towards Efficient Chain-of-Pixel Reasoning
May 29, 2025Existing reasoning segmentation approaches typically fine-tune multimodal large language models (MLLMs) using image-text pairs and corresponding mask labels. However, they exhibit limited generalization to out-of-distribution scenarios without an explicit reasoning process. Although recent efforts leverage reinforcement learning through group-relative policy optimization (GRPO) to enhance reasoning ability, they often suffer from overthinking - producing uniformly verbose reasoning chains irrespective of task complexity. This results in elevated computational costs and limited control over reasoning quality. To address this problem, we propose PixelThink, a simple yet effective scheme that integrates externally estimated task difficulty and internally measured model uncertainty to regulate reasoning generation within a reinforcement learning paradigm. The model learns to compress reasoning length in accordance with scene complexity and predictive confidence. To support comprehensive evaluation, we introduce ReasonSeg-Diff, an extended benchmark with annotated reasoning references and difficulty scores, along with a suite of metrics designed to assess segmentation accuracy, reasoning quality, and efficiency jointly. Experimental results demonstrate that the proposed approach improves both reasoning efficiency and overall segmentation performance. Our work contributes novel perspectives towards efficient and interpretable multimodal understanding. The code and model will be publicly available.
Can MLLMs Guide Me Home? A Benchmark Study on Fine-Grained Visual Reasoning from Transit Maps
May 24, 2025Multimodal large language models (MLLMs) have recently achieved significant progress in visual tasks, including semantic scene understanding and text-image alignment, with reasoning variants enhancing performance on complex tasks involving mathematics and logic. However, their capacity for reasoning tasks involving fine-grained visual understanding remains insufficiently evaluated. To address this gap, we introduce ReasonMap, a benchmark designed to assess the fine-grained visual understanding and spatial reasoning abilities of MLLMs. ReasonMap encompasses high-resolution transit maps from 30 cities across 13 countries and includes 1,008 question-answer pairs spanning two question types and three templates. Furthermore, we design a two-level evaluation pipeline that properly assesses answer correctness and quality. Comprehensive evaluations of 15 popular MLLMs, including both base and reasoning variants, reveal a counterintuitive pattern: among open-source models, base models outperform reasoning ones, while the opposite trend is observed in closed-source models. Additionally, performance generally degrades when visual inputs are masked, indicating that while MLLMs can leverage prior knowledge to answer some questions, fine-grained visual reasoning tasks still require genuine visual perception for strong performance. Our benchmark study offers new insights into visual reasoning and contributes to investigating the gap between open-source and closed-source models.