 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Interaction-aware Evaluation Method for Highly Automated Vehicles
Feb 23, 2021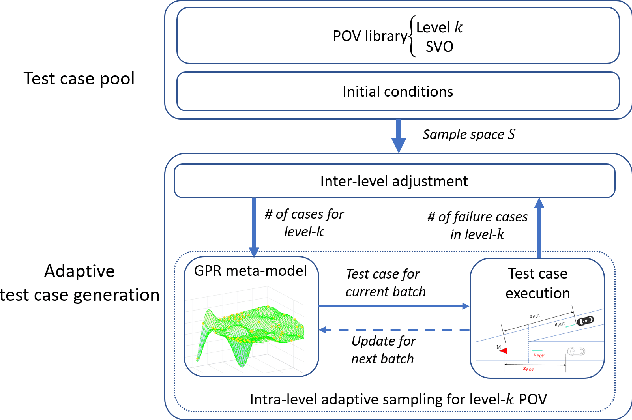
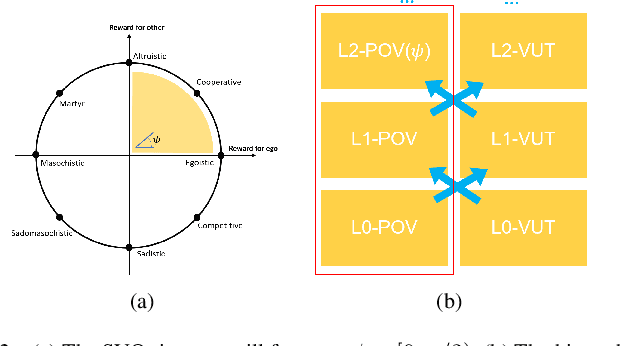
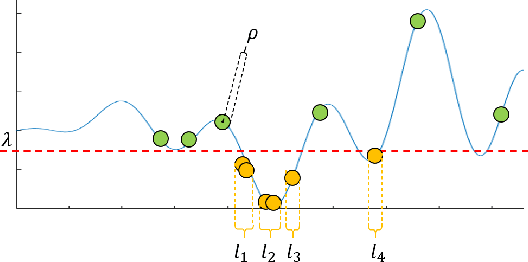
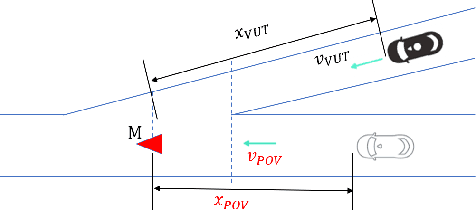
It is important to build a rigorous verification and validation (V&V) process to evaluate the safety of highly automated vehicles (HAVs) before their wide deployment on public roads. In this paper, we propose an interaction-aware framework for HAV safety evaluation which is suitable for some highly-interactive driving scenarios including highway merging, roundabout entering, etc. Contrary to existing approaches where the primary other vehicle (POV) takes predetermined maneuvers, we model the POV as a game-theoretic agent. To capture a wide variety of interactions between the POV and the vehicle under test (VUT), we characterize the interactive behavior using level-k game theory and social value orientation and train a diverse set of POVs using reinforcement learning. Moreover, we propose an adaptive test case sampling scheme based on the Gaussian process regression technique to generate customized and diverse challenging cases. The highway merging is used as the example scenario. We found the proposed method is able to capture a wide range of POV behaviors and achieve better coverage of the failure modes of the VUT compared with other evaluation approaches.
Driving-Policy Adaptive Safeguard for Autonomous Vehicles Using Reinforcement Learning
Dec 02, 2020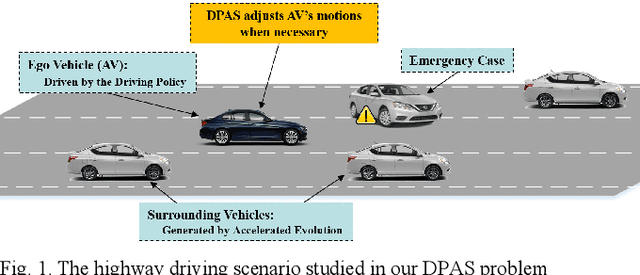
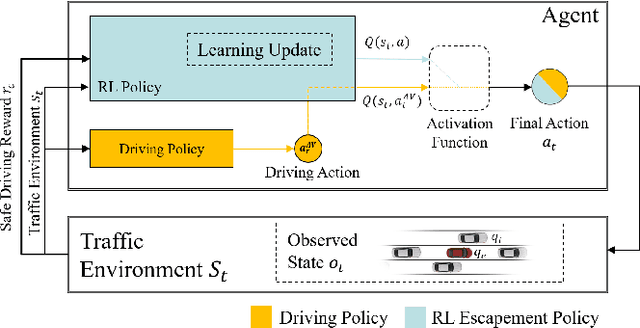
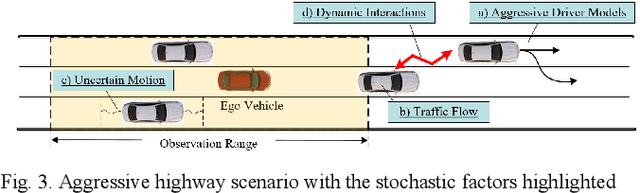
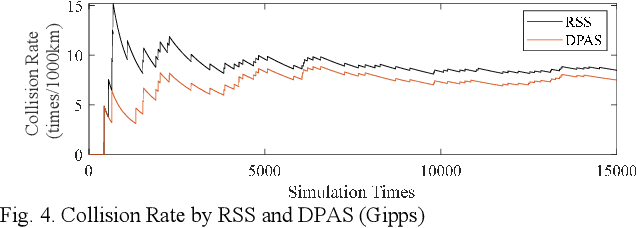
Safeguard functions such as those provided by advanced emergency braking (AEB) can provide another layer of safety for autonomous vehicles (AV). A smart safeguard function should adapt the activation conditions to the driving policy, to avoid unnecessary interventions as well as improve vehicle safety. This paper proposes a driving-policy adaptive safeguard (DPAS) design, including a collision avoidance strategy and an activation function. The collision avoidance strategy is designed in a reinforcement learning framework, obtained by Monte-Carlo Tree Search (MCTS). It can learn from past collisions and manipulate both braking and steering in stochastic traffics. The driving-policy adaptive activation function should dynamically assess current driving policy risk and kick in when an urgent threat is detected. To generate this activation function, MCTS' exploration and rollout modules are designed to fully evaluate the AV's current driving policy, and then explore other safer actions. In this study, the DPAS is validated with two typical highway-driving policies. The results are obtained through and 90,000 times in the stochastic and aggressive simulated traffic. The results are calibrated by naturalistic driving data and show that the proposed safeguard reduces the collision rate significantly without introducing more interventions, compared with the state-based benchmark safeguards. In summary, the proposed safeguard leverages the learning-based method in stochastic and emergent scenarios and imposes minimal influence on the driving policy.
Uncertainty-Aware Voxel based 3D Object Detection and Tracking with von-Mises Loss
Nov 04, 2020
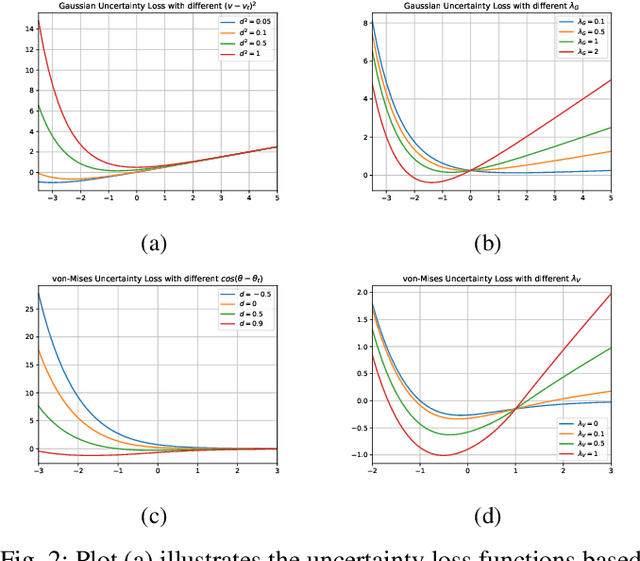
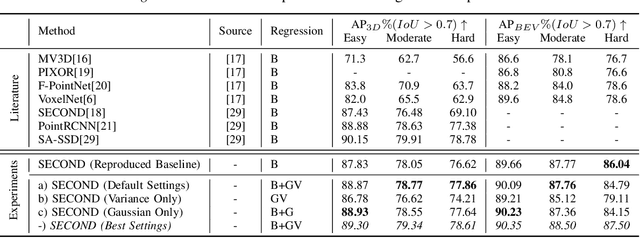
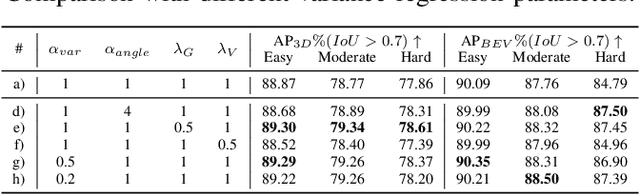
Object detection and tracking is a key task in autonomy. Specifically, 3D object detection and tracking have been an emerging hot topic recently. Although various methods have been proposed for object detection, uncertainty in the 3D detection and tracking tasks has been less explored. Uncertainty helps us tackle the error in the perception system and improve robustness. In this paper, we propose a method for improving target tracking performance by adding uncertainty regression to the SECOND detector, which is one of the most representative algorithms of 3D object detection. Our method estimates positional and dimensional uncertainties with Gaussian Negative Log-Likelihood (NLL) Loss for estimation and introduces von-Mises NLL Loss for angular uncertainty estimation. We fed the uncertainty output into a classical object tracking framework and proved that our method increased the tracking performance compared against the vanilla tracker with constant covariance assumption.
SUPER: A Novel Lane Detection System
May 14, 2020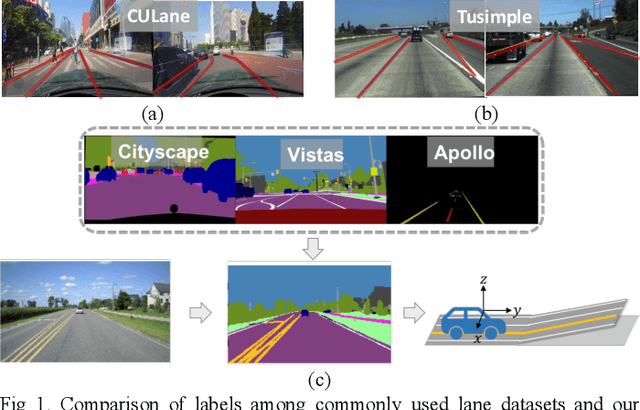
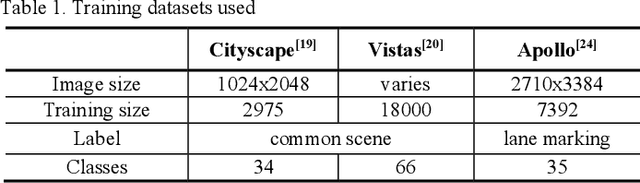
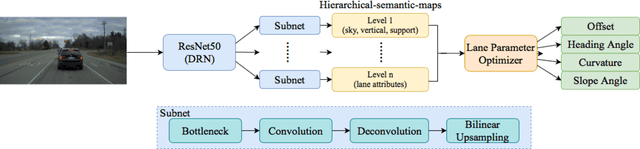
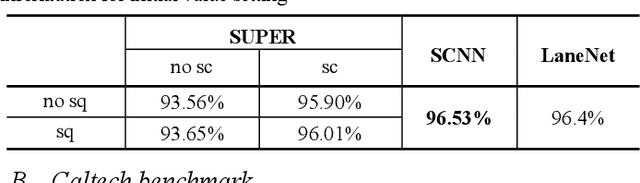
AI-based lane detection algorithms were actively studied over the last few years. Many have demonstrated superior performance compared with traditional feature-based methods. The accuracy, however, is still generally in the low 80% or high 90%, or even lower when challenging images are used. In this paper, we propose a real-time lane detection system, called Scene Understanding Physics-Enhanced Real-time (SUPER) algorithm. The proposed method consists of two main modules: 1) a hierarchical semantic segmentation network as the scene feature extractor and 2) a physics enhanced multi-lane parameter optimization module for lane inference. We train the proposed system using heterogeneous data from Cityscapes, Vistas and Apollo, and evaluate the performance on four completely separate datasets (that were never seen before), including Tusimple, Caltech, URBAN KITTI-ROAD, and X-3000. The proposed approach performs the same or better than lane detection models already trained on the same dataset and performs well even on datasets it was never trained on. Real-world vehicle tests were also conducted. Preliminary test results show promising real-time lane-detection performance compared with the Mobileye.
Monocular Depth Prediction Through Continuous 3D Loss
Mar 21, 2020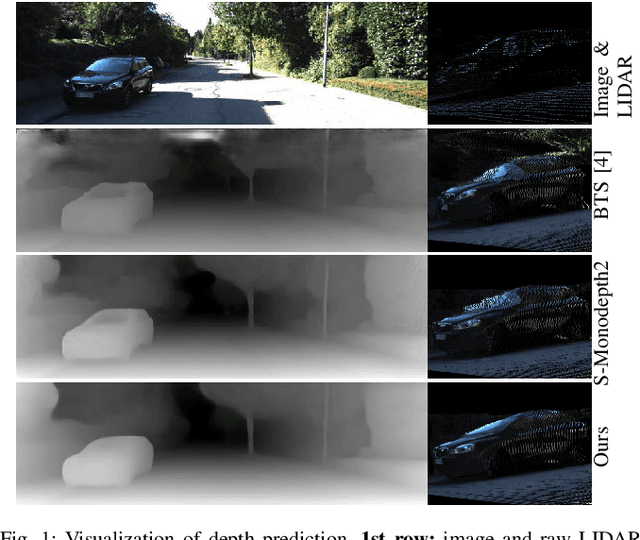
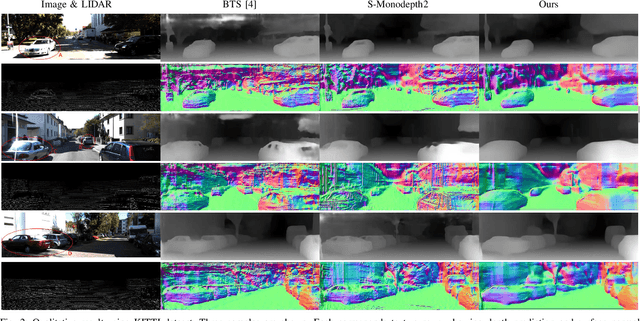
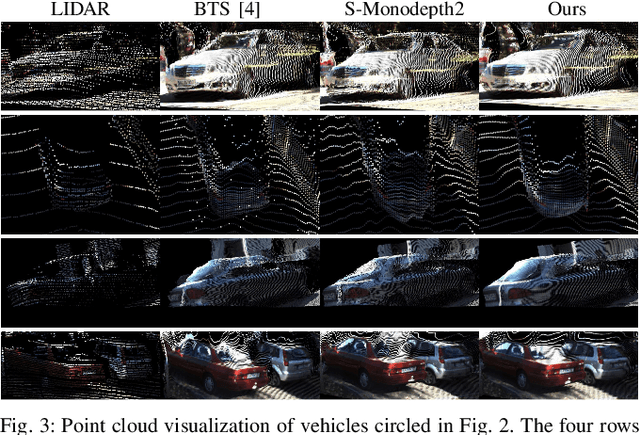
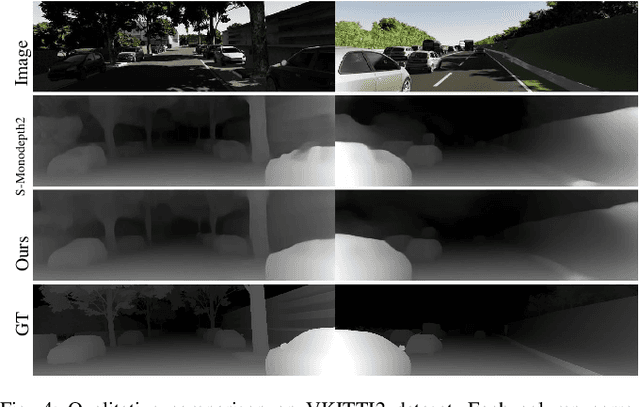
This paper reports a new continuous 3D loss function for learning depth from monocular images. The dense depth prediction from a monocular image is supervised using sparse LIDAR points, exploiting available data from camera-LIDAR sensor suites during training. Currently, accurate and affordable range sensor is not available. Stereo cameras and LIDARs measure depth either inaccurately or sparsely/costly. In contrast to the current point-to-point loss evaluation approach, the proposed 3D loss treats point clouds as continuous objects; and therefore, it overcomes the lack of dense ground truth depth due to the sparsity of LIDAR measurements. Experimental evaluations show that the proposed method achieves accurate depth measurement with consistent 3D geometric structures through a monocular camera.
Generating Socially Acceptable Perturbations for Efficient Evaluation of Autonomous Vehicles
Mar 18, 2020

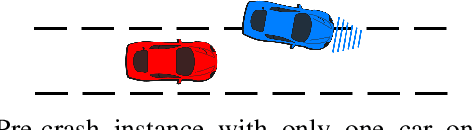
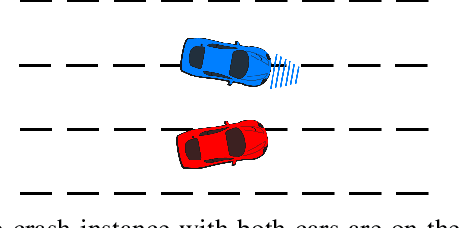
Deep reinforcement learning methods have been widely used in recent years for autonomous vehicle's decision-making. A key issue is that deep neural networks can be fragile to adversarial attacks or other unseen inputs. In this paper, we address the latter issue: we focus on generating socially acceptable perturbations (SAP), so that the autonomous vehicle (AV agent), instead of the challenging vehicle (attacker), is primarily responsible for the crash. In our process, one attacker is added to the environment and trained by deep reinforcement learning to generate the desired perturbation. The reward is designed so that the attacker aims to fail the AV agent in a socially acceptable way. After training the attacker, the agent policy is evaluated in both the original naturalistic environment and the environment with one attacker. The results show that the agent policy which is safe in the naturalistic environment has many crashes in the perturbed environment.
Safe Reinforcement Learning for Autonomous Vehicles through Parallel Constrained Policy Optimization
Mar 03, 2020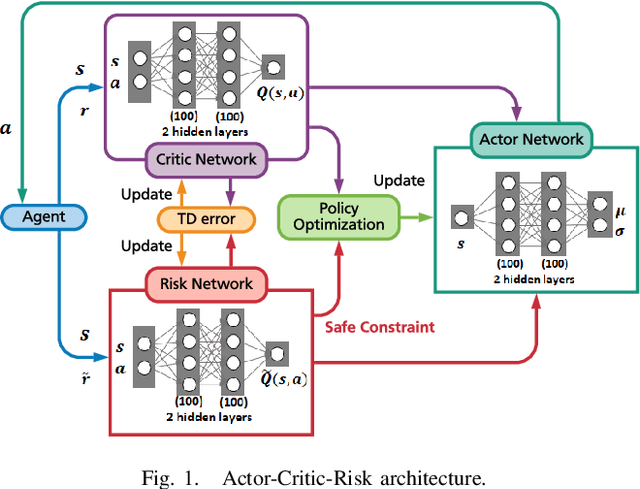
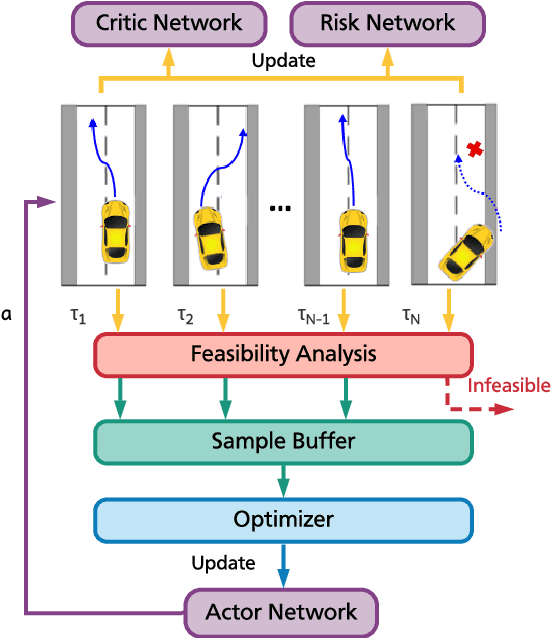

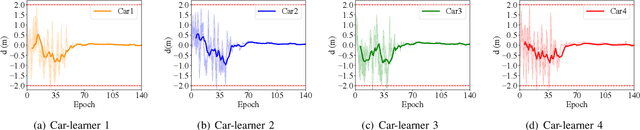
Reinforcement learning (RL) is attracting increasing interests in autonomous driving due to its potential to solve complex classification and control problems. However, existing RL algorithms are rarely applied to real vehicles for two predominant problems: behaviours are unexplainable, and they cannot guarantee safety under new scenarios. This paper presents a safe RL algorithm, called Parallel Constrained Policy Optimization (PCPO), for two autonomous driving tasks. PCPO extends today's common actor-critic architecture to a three-component learning framework, in which three neural networks are used to approximate the policy function, value function and a newly added risk function, respectively. Meanwhile, a trust region constraint is added to allow large update steps without breaking the monotonic improvement condition. To ensure the feasibility of safety constrained problems, synchronized parallel learners are employed to explore different state spaces, which accelerates learning and policy-update. The simulations of two scenarios for autonomous vehicles confirm we can ensure safety while achieving fast learning.
Mcity Data Collection for Automated Vehicles Study
Dec 12, 2019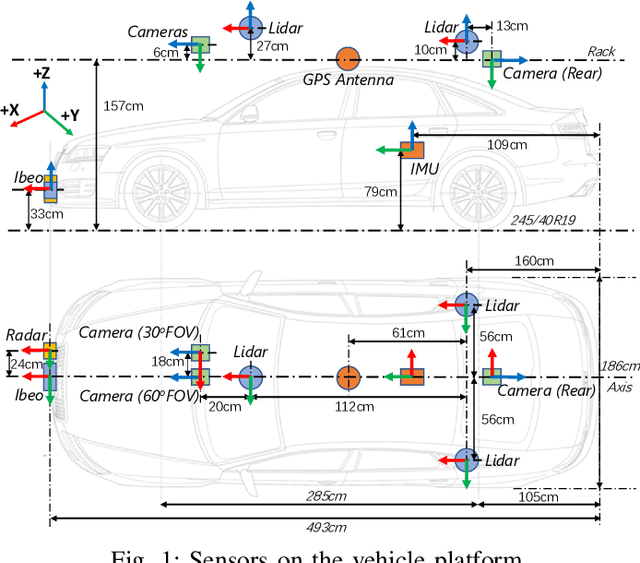
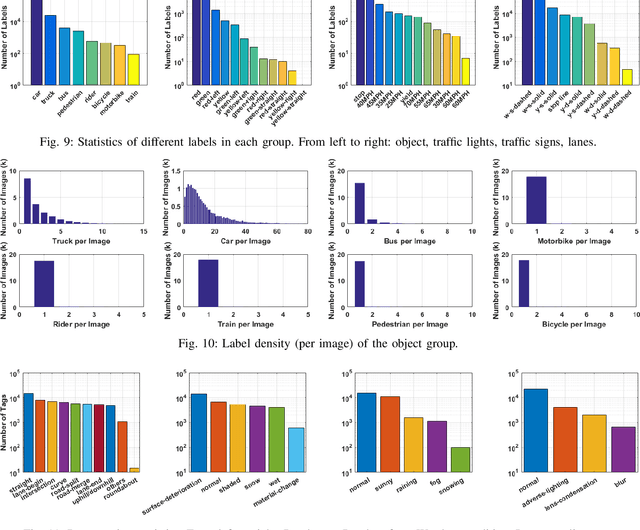
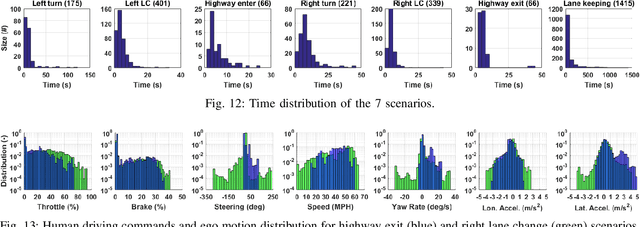
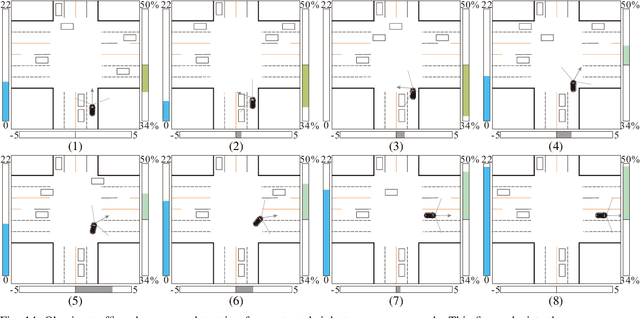
The main goal of this paper is to introduce the data collection effort at Mcity targeting automated vehicle development. We captured a comprehensive set of data from a set of perception sensors (Lidars, Radars, Cameras) as well as vehicle steering/brake/throttle inputs and an RTK unit. Two in-cabin cameras record the human driver's behaviors for possible future use. The naturalistic driving on selected open roads is recorded at different time of day and weather conditions. We also perform designed choreography data collection inside the Mcity test facility focusing on vehicle to vehicle, and vehicle to vulnerable road user interactions which is quite unique among existing open-source datasets. The vehicle platform, data content, tags/labels, and selected analysis results are shown in this paper.
Eco-Mobility-on-Demand Fleet Control with Ride-Sharing
Aug 23, 2019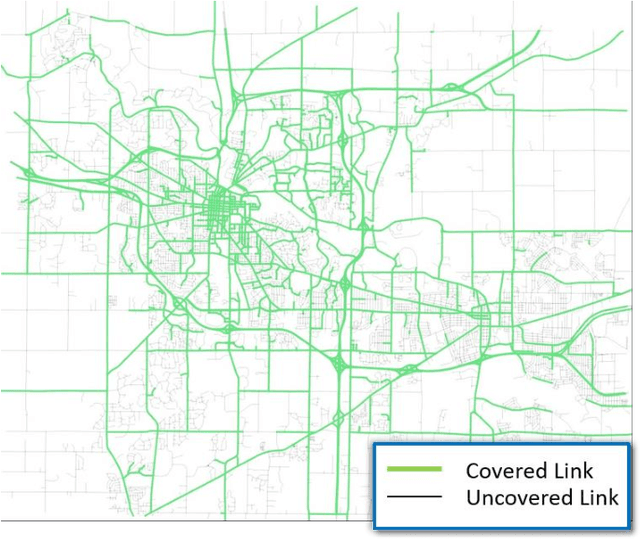
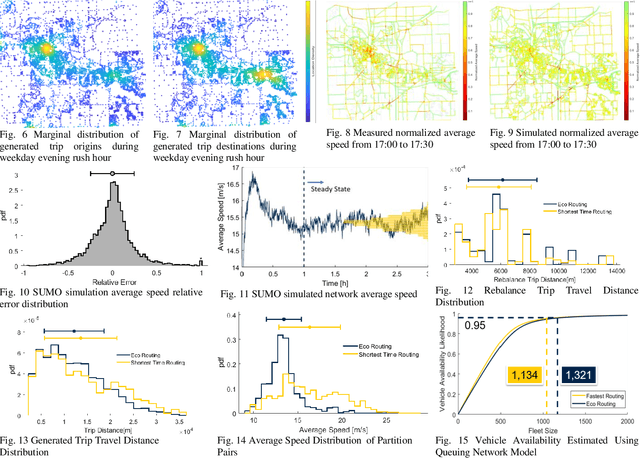
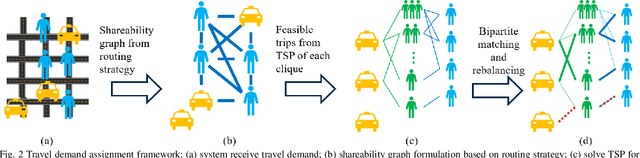
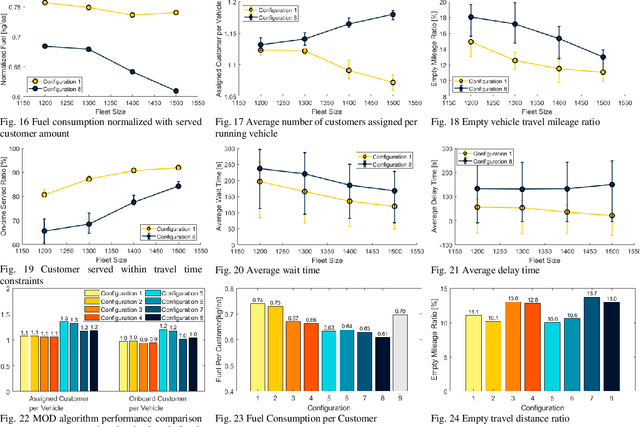
Shared Mobility-on-Demand using automated vehicles can reduce energy consumption and cost for future mobility. However, its full potential in energy saving has not been fully explored. An algorithm to minimize fleet fuel consumption while satisfying customers travel time constraints is developed in this paper. Numerical simulations with realistic travel demand and route choice are performed, showing that if fuel consumption is not considered, the MOD service can increase fleet fuel consumption due to increased empty vehicle mileage. With fuel consumption as part of the cost function, we can reduce total fuel consumption by 12 percent while maintaining a high level of mobility service.
Modeling Multi-Vehicle Interaction Scenarios Using Gaussian Random Field
Jun 25, 2019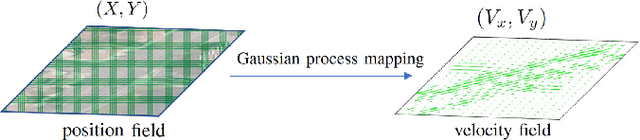
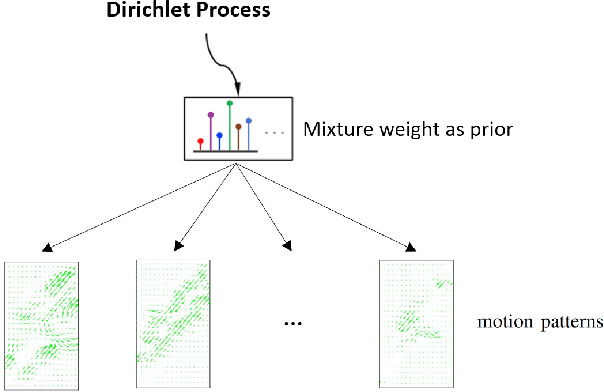
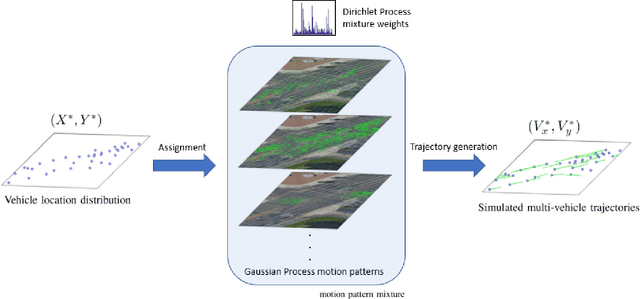
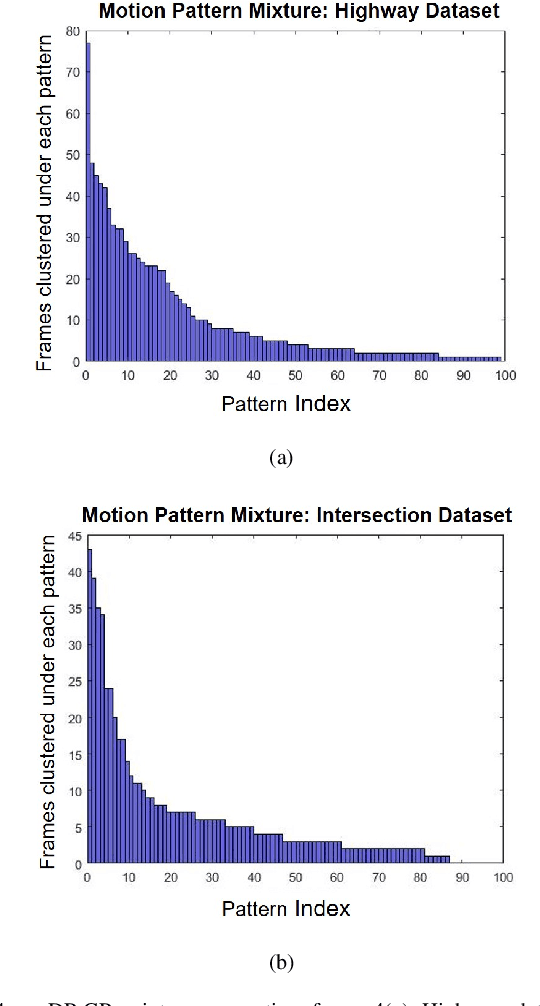
Autonomous vehicles (AV) are expected to navigate in complex traffic scenarios with multiple surrounding vehicles. The correlations between road users vary over time, the degree of which, in theory, could be infinitely large, and thus posing a great challenge in modeling and predicting the driving environment. In this research, we propose a method to reproduce such high-dimensional scenarios in a finitely tractable form by defining a stochastic vector field model in multi-vehicle interactions. We then apply non-parametric Bayesian learning to extract the underlying motion patterns from a large quantity of naturalistic traffic data. We use Gaussian process to model multi-vehicle motion, and Dirichlet process to assign each observation to a specific scenario. We implement the proposed method on NGSim highway and intersection data sets, in which complex multi-vehicle interactions are prevalent. The results show that the proposed method is capable of capturing motion patterns from both settings, without imposing heroic prior, hence can be applied for a wide array of traffic situations. The proposed modeling can enable simulation platforms and other testing methods designed for AV evaluation, to easily model and generate traffic scenarios emulating large scale driving data.