 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLarge Foundation Model for Ads Recommendation
Aug 20, 2025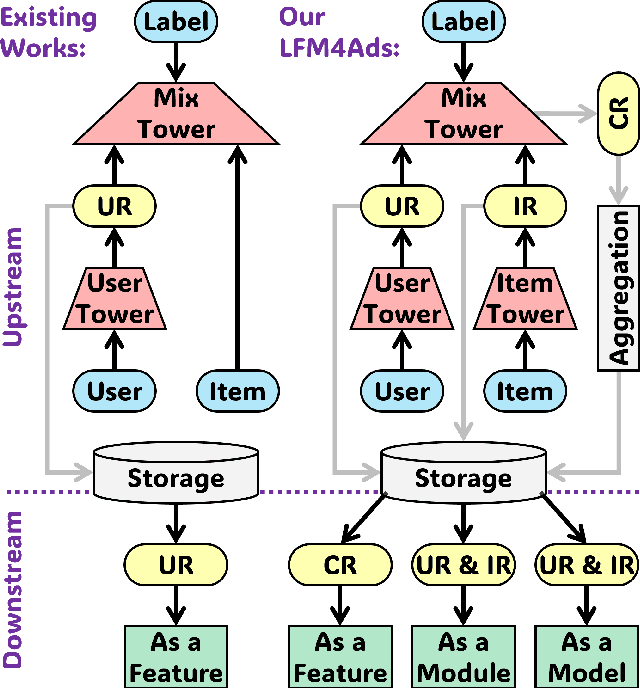
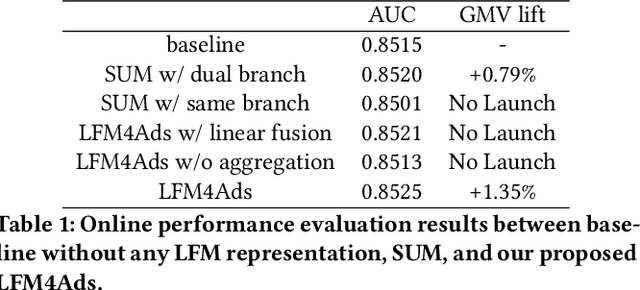
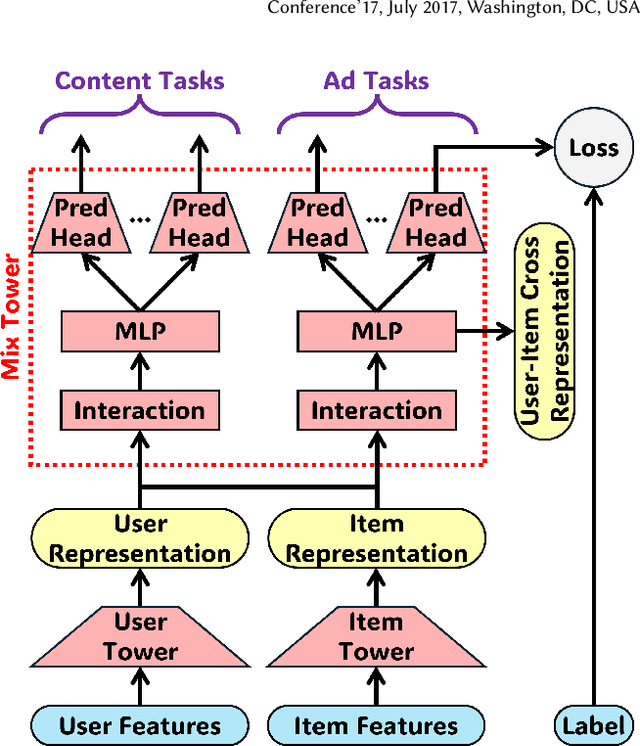
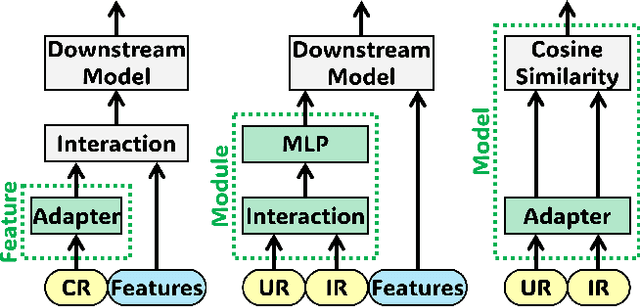
Online advertising relies on accurate recommendation models, with recent advances using pre-trained large-scale foundation models (LFMs) to capture users' general interests across multiple scenarios and tasks. However, existing methods have critical limitations: they extract and transfer only user representations (URs), ignoring valuable item representations (IRs) and user-item cross representations (CRs); and they simply use a UR as a feature in downstream applications, which fails to bridge upstream-downstream gaps and overlooks more transfer granularities. In this paper, we propose LFM4Ads, an All-Representation Multi-Granularity transfer framework for ads recommendation. It first comprehensively transfers URs, IRs, and CRs, i.e., all available representations in the pre-trained foundation model. To effectively utilize the CRs, it identifies the optimal extraction layer and aggregates them into transferable coarse-grained forms. Furthermore, we enhance the transferability via multi-granularity mechanisms: non-linear adapters for feature-level transfer, an Isomorphic Interaction Module for module-level transfer, and Standalone Retrieval for model-level transfer. LFM4Ads has been successfully deployed in Tencent's industrial-scale advertising platform, processing tens of billions of daily samples while maintaining terabyte-scale model parameters with billions of sparse embedding keys across approximately two thousand features. Since its production deployment in Q4 2024, LFM4Ads has achieved 10+ successful production launches across various advertising scenarios, including primary ones like Weixin Moments and Channels. These launches achieve an overall GMV lift of 2.45% across the entire platform, translating to estimated annual revenue increases in the hundreds of millions of dollars.
MDE-Edit: Masked Dual-Editing for Multi-Object Image Editing via Diffusion Models
May 08, 2025Multi-object editing aims to modify multiple objects or regions in complex scenes while preserving structural coherence. This task faces significant challenges in scenarios involving overlapping or interacting objects: (1) Inaccurate localization of target objects due to attention misalignment, leading to incomplete or misplaced edits; (2) Attribute-object mismatch, where color or texture changes fail to align with intended regions due to cross-attention leakage, creating semantic conflicts (\textit{e.g.}, color bleeding into non-target areas). Existing methods struggle with these challenges: approaches relying on global cross-attention mechanisms suffer from attention dilution and spatial interference between objects, while mask-based methods fail to bind attributes to geometrically accurate regions due to feature entanglement in multi-object scenarios. To address these limitations, we propose a training-free, inference-stage optimization approach that enables precise localized image manipulation in complex multi-object scenes, named MDE-Edit. MDE-Edit optimizes the noise latent feature in diffusion models via two key losses: Object Alignment Loss (OAL) aligns multi-layer cross-attention with segmentation masks for precise object positioning, and Color Consistency Loss (CCL) amplifies target attribute attention within masks while suppressing leakage to adjacent regions. This dual-loss design ensures localized and coherent multi-object edits. Extensive experiments demonstrate that MDE-Edit outperforms state-of-the-art methods in editing accuracy and visual quality, offering a robust solution for complex multi-object image manipulation tasks.
Robust Misinformation Detection by Visiting Potential Commonsense Conflict
Apr 30, 2025



The development of Internet technology has led to an increased prevalence of misinformation, causing severe negative effects across diverse domains. To mitigate this challenge, Misinformation Detection (MD), aiming to detect online misinformation automatically, emerges as a rapidly growing research topic in the community. In this paper, we propose a novel plug-and-play augmentation method for the MD task, namely Misinformation Detection with Potential Commonsense Conflict (MD-PCC). We take inspiration from the prior studies indicating that fake articles are more likely to involve commonsense conflict. Accordingly, we construct commonsense expressions for articles, serving to express potential commonsense conflicts inferred by the difference between extracted commonsense triplet and golden ones inferred by the well-established commonsense reasoning tool COMET. These expressions are then specified for each article as augmentation. Any specific MD methods can be then trained on those commonsense-augmented articles. Besides, we also collect a novel commonsense-oriented dataset named CoMis, whose all fake articles are caused by commonsense conflict. We integrate MD-PCC with various existing MD backbones and compare them across both 4 public benchmark datasets and CoMis. Empirical results demonstrate that MD-PCC can consistently outperform the existing MD baselines.
CeViT: Copula-Enhanced Vision Transformer in multi-task learning and bi-group image covariates with an application to myopia screening
Jan 11, 2025



We aim to assist image-based myopia screening by resolving two longstanding problems, "how to integrate the information of ocular images of a pair of eyes" and "how to incorporate the inherent dependence among high-myopia status and axial length for both eyes." The classification-regression task is modeled as a novel 4-dimensional muti-response regression, where discrete responses are allowed, that relates to two dependent 3rd-order tensors (3D ultrawide-field fundus images). We present a Vision Transformer-based bi-channel architecture, named CeViT, where the common features of a pair of eyes are extracted via a shared Transformer encoder, and the interocular asymmetries are modeled through separated multilayer perceptron heads. Statistically, we model the conditional dependence among mixture of discrete-continuous responses given the image covariates by a so-called copula loss. We establish a new theoretical framework regarding fine-tuning on CeViT based on latent representations, allowing the black-box fine-tuning procedure interpretable and guaranteeing higher relative efficiency of fine-tuning weight estimation in the asymptotic setting. We apply CeViT to an annotated ultrawide-field fundus image dataset collected by Shanghai Eye \& ENT Hospital, demonstrating that CeViT enhances the baseline model in both accuracy of classifying high-myopia and prediction of AL on both eyes.
AdaptLIL: A Gaze-Adaptive Visualization for Ontology Mapping
Nov 18, 2024This paper showcases AdaptLIL, a real-time adaptive link-indented list ontology mapping visualization that uses eye gaze as the primary input source. Through a multimodal combination of real-time systems, deep learning, and web development applications, this system uniquely curtails graphical overlays (adaptations) to pairwise mappings of link-indented list ontology visualizations for individual users based solely on their eye gaze.
Wavelet-based Mamba with Fourier Adjustment for Low-light Image Enhancement
Oct 27, 2024



Frequency information (e.g., Discrete Wavelet Transform and Fast Fourier Transform) has been widely applied to solve the issue of Low-Light Image Enhancement (LLIE). However, existing frequency-based models primarily operate in the simple wavelet or Fourier space of images, which lacks utilization of valid global and local information in each space. We found that wavelet frequency information is more sensitive to global brightness due to its low-frequency component while Fourier frequency information is more sensitive to local details due to its phase component. In order to achieve superior preliminary brightness enhancement by optimally integrating spatial channel information with low-frequency components in the wavelet transform, we introduce channel-wise Mamba, which compensates for the long-range dependencies of CNNs and has lower complexity compared to Diffusion and Transformer models. So in this work, we propose a novel Wavelet-based Mamba with Fourier Adjustment model called WalMaFa, consisting of a Wavelet-based Mamba Block (WMB) and a Fast Fourier Adjustment Block (FFAB). We employ an Encoder-Latent-Decoder structure to accomplish the end-to-end transformation. Specifically, WMB is adopted in the Encoder and Decoder to enhance global brightness while FFAB is adopted in the Latent to fine-tune local texture details and alleviate ambiguity. Extensive experiments demonstrate that our proposed WalMaFa achieves state-of-the-art performance with fewer computational resources and faster speed. Code is now available at: https://github.com/mcpaulgeorge/WalMaFa.
Sample then Identify: A General Framework for Risk Control and Assessment in Multimodal Large Language Models
Oct 10, 2024



Multimodal Large Language Models (MLLMs) exhibit promising advancements across various tasks, yet they still encounter significant trustworthiness issues. Prior studies apply Split Conformal Prediction (SCP) in language modeling to construct prediction sets with statistical guarantees. However, these methods typically rely on internal model logits or are restricted to multiple-choice settings, which hampers their generalizability and adaptability in dynamic, open-ended environments. In this paper, we introduce TRON, a two-step framework for risk control and assessment, applicable to any MLLM that supports sampling in both open-ended and closed-ended scenarios. TRON comprises two main components: (1) a novel conformal score to sample response sets of minimum size, and (2) a nonconformity score to identify high-quality responses based on self-consistency theory, controlling the error rates by two specific risk levels. Furthermore, we investigate semantic redundancy in prediction sets within open-ended contexts for the first time, leading to a promising evaluation metric for MLLMs based on average set size. Our comprehensive experiments across four Video Question-Answering (VideoQA) datasets utilizing eight MLLMs show that TRON achieves desired error rates bounded by two user-specified risk levels. Additionally, deduplicated prediction sets maintain adaptiveness while being more efficient and stable for risk assessment under different risk levels.
Interpretable Vision-Language Survival Analysis with Ordinal Inductive Bias for Computational Pathology
Sep 14, 2024



Histopathology Whole-Slide Images (WSIs) provide an important tool to assess cancer prognosis in computational pathology (CPATH). While existing survival analysis (SA) approaches have made exciting progress, they are generally limited to adopting highly-expressive architectures and only coarse-grained patient-level labels to learn prognostic visual representations from gigapixel WSIs. Such learning paradigm suffers from important performance bottlenecks, when facing present scarce training data and standard multi-instance learning (MIL) framework in CPATH. To break through it, this paper, for the first time, proposes a new Vision-Language-based SA (VLSA) paradigm. Concretely, (1) VLSA is driven by pathology VL foundation models. It no longer relies on high-capability networks and shows the advantage of data efficiency. (2) In vision-end, VLSA encodes prognostic language prior and then employs it as auxiliary signals to guide the aggregating of prognostic visual features at instance level, thereby compensating for the weak supervision in MIL. Moreover, given the characteristics of SA, we propose i) ordinal survival prompt learning to transform continuous survival labels into textual prompts; and ii) ordinal incidence function as prediction target to make SA compatible with VL-based prediction. VLSA's predictions can be interpreted intuitively by our Shapley values-based method. The extensive experiments on five datasets confirm the effectiveness of our scheme. Our VLSA could pave a new way for SA in CPATH by offering weakly-supervised MIL an effective means to learn valuable prognostic clues from gigapixel WSIs. Our source code is available at https://github.com/liupei101/VLSA.
OU-CoViT: Copula-Enhanced Bi-Channel Multi-Task Vision Transformers with Dual Adaptation for OU-UWF Images
Aug 18, 2024



Myopia screening using cutting-edge ultra-widefield (UWF) fundus imaging and joint modeling of multiple discrete and continuous clinical scores presents a promising new paradigm for multi-task problems in Ophthalmology. The bi-channel framework that arises from the Ophthalmic phenomenon of ``interocular asymmetries'' of both eyes (OU) calls for new employment on the SOTA transformer-based models. However, the application of copula models for multiple mixed discrete-continuous labels on deep learning (DL) is challenging. Moreover, the application of advanced large transformer-based models to small medical datasets is challenging due to overfitting and computational resource constraints. To resolve these challenges, we propose OU-CoViT: a novel Copula-Enhanced Bi-Channel Multi-Task Vision Transformers with Dual Adaptation for OU-UWF images, which can i) incorporate conditional correlation information across multiple discrete and continuous labels within a deep learning framework (by deriving the closed form of a novel Copula Loss); ii) take OU inputs subject to both high correlation and interocular asymmetries using a bi-channel model with dual adaptation; and iii) enable the adaptation of large vision transformer (ViT) models to small medical datasets. Solid experiments demonstrate that OU-CoViT significantly improves prediction performance compared to single-channel baseline models with empirical loss. Furthermore, the novel architecture of OU-CoViT allows generalizability and extensions of our dual adaptation and Copula Loss to various ViT variants and large DL models on small medical datasets. Our approach opens up new possibilities for joint modeling of heterogeneous multi-channel input and mixed discrete-continuous clinical scores in medical practices and has the potential to advance AI-assisted clinical decision-making in various medical domains beyond Ophthalmology.
Why Misinformation is Created? Detecting them by Integrating Intent Features
Jul 27, 2024



Various social media platforms, e.g., Twitter and Reddit, allow people to disseminate a plethora of information more efficiently and conveniently. However, they are inevitably full of misinformation, causing damage to diverse aspects of our daily lives. To reduce the negative impact, timely identification of misinformation, namely Misinformation Detection (MD), has become an active research topic receiving widespread attention. As a complex phenomenon, the veracity of an article is influenced by various aspects. In this paper, we are inspired by the opposition of intents between misinformation and real information. Accordingly, we propose to reason the intent of articles and form the corresponding intent features to promote the veracity discrimination of article features. To achieve this, we build a hierarchy of a set of intents for both misinformation and real information by referring to the existing psychological theories, and we apply it to reason the intent of articles by progressively generating binary answers with an encoder-decoder structure. We form the corresponding intent features and integrate it with the token features to achieve more discriminative article features for MD. Upon these ideas, we suggest a novel MD method, namely Detecting Misinformation by Integrating Intent featuRes (DM-INTER). To evaluate the performance of DM-INTER, we conduct extensive experiments on benchmark MD datasets. The experimental results validate that DM-INTER can outperform the existing baseline MD methods.