 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Stochastic force inference via density estimation
Oct 03, 2023
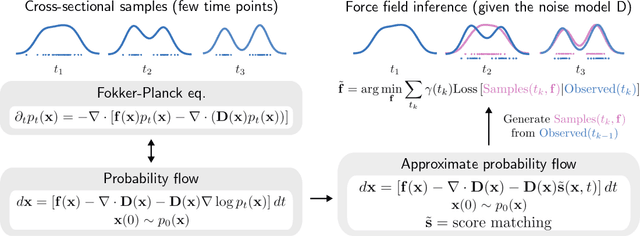
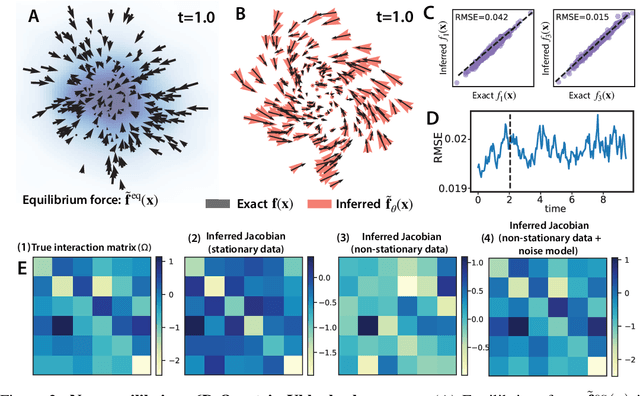
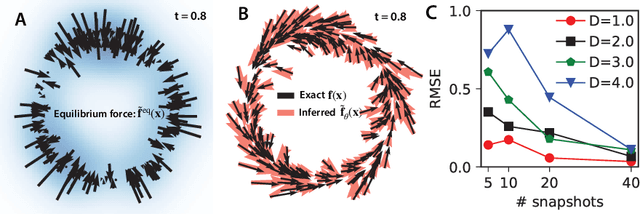
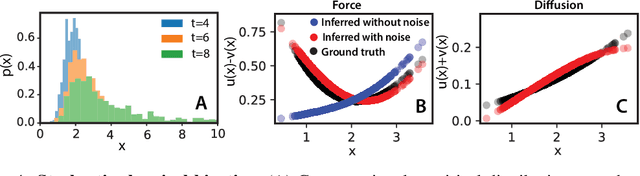
Inferring dynamical models from low-resolution temporal data continues to be a significant challenge in biophysics, especially within transcriptomics, where separating molecular programs from noise remains an important open problem. We explore a common scenario in which we have access to an adequate amount of cross-sectional samples at a few time-points, and assume that our samples are generated from a latent diffusion process. We propose an approach that relies on the probability flow associated with an underlying diffusion process to infer an autonomous, nonlinear force field interpolating between the distributions. Given a prior on the noise model, we employ score-matching to differentiate the force field from the intrinsic noise. Using relevant biophysical examples, we demonstrate that our approach can extract non-conservative forces from non-stationary data, that it learns equilibrium dynamics when applied to steady-state data, and that it can do so with both additive and multiplicative noise models.
A Distributed Multi-Robot Framework for Exploration, Information Acquisition and Consensus
Oct 03, 2023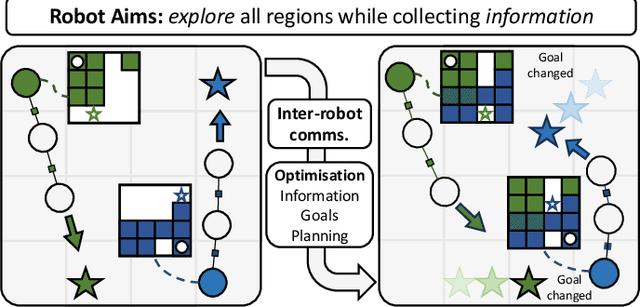
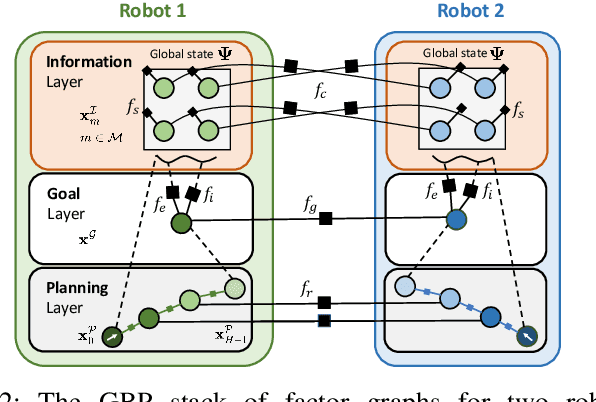
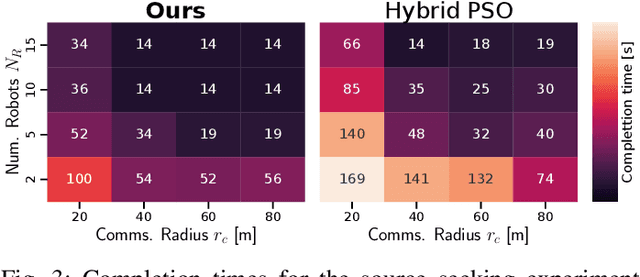
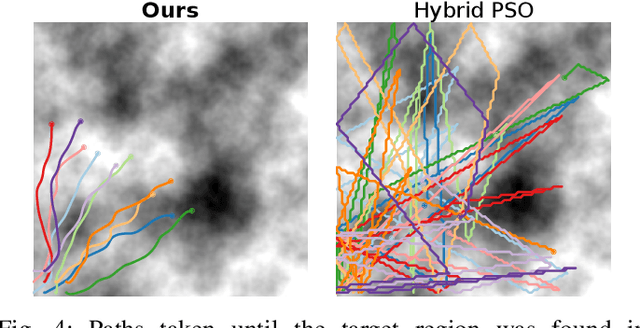
The distributed coordination of robot teams performing complex tasks is challenging to formulate. The different aspects of a complete task such as local planning for obstacle avoidance, global goal coordination and collaborative mapping are often solved separately, when clearly each of these should influence the others for the most efficient behaviour. In this paper we use the example application of distributed information acquisition as a robot team explores a large space to show that we can formulate the whole problem as a single factor graph with multiple connected layers representing each aspect. We use Gaussian Belief Propagation (GBP) as the inference mechanism, which permits parallel, on-demand or asynchronous computation for efficiency when different aspects are more or less important. This is the first time that a distributed GBP multi-robot solver has been proven to enable intelligent collaborative behaviour rather than just guiding robots to individual, selfish goals. We encourage the reader to view our demos at https://aalpatya.github.io/gbpstack
CORec-Cri: How collaborative and social technologies can help to contextualize crises?
Oct 03, 2023Crisis situations can present complex and multifaceted challenges, often requiring the involvement of multiple organizations and stakeholders with varying areas of expertise, responsibilities, and resources. Acquiring accurate and timely information about impacted areas is crucial to effectively respond to these crises. In this paper, we investigate how collaborative and social technologies help to contextualize crises, including identifying impacted areas and real-time needs. To this end, we define CORec-Cri (Contextulized Ontology-based Recommender system for crisis management) based on existing work. Our motivation for this approach is two-fold: first, effective collaboration among stakeholders is essential for efficient and coordinated crisis response; second, social computing facilitates interaction, information flow, and collaboration among stakeholders. We detail the key components of our system design, highlighting its potential to support decision-making, resource allocation, and communication among stakeholders. Finally, we provide examples of how our system can be applied to contextualize crises to improve crisis management.
TreeScope: An Agricultural Robotics Dataset for LiDAR-Based Mapping of Trees in Forests and Orchards
Oct 03, 2023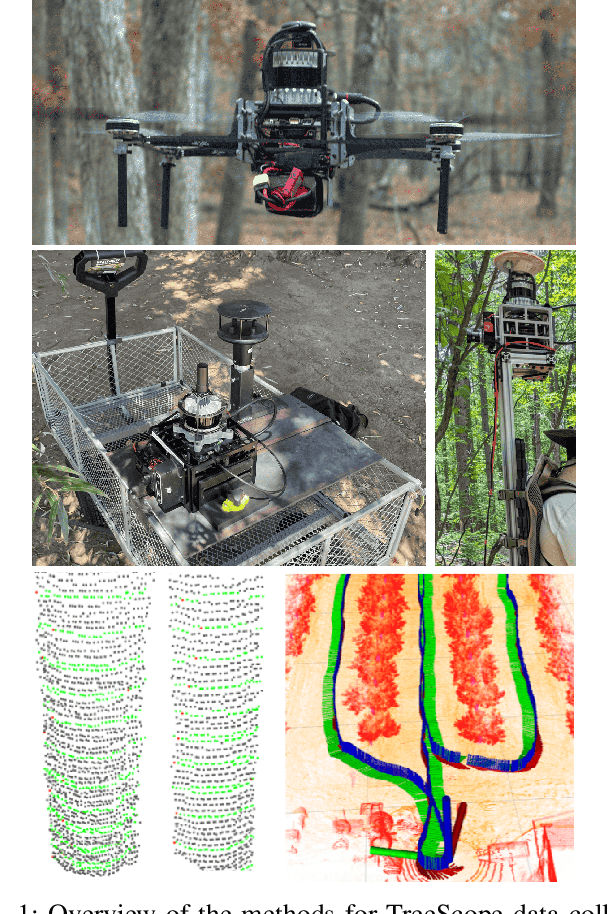
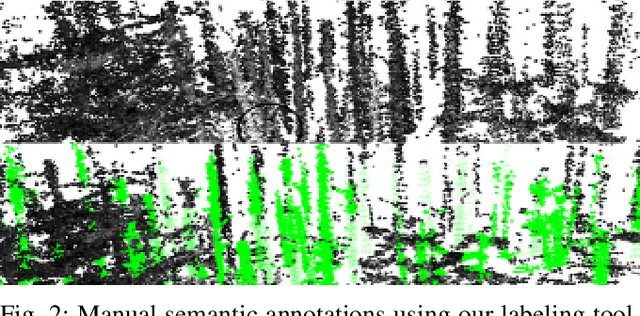
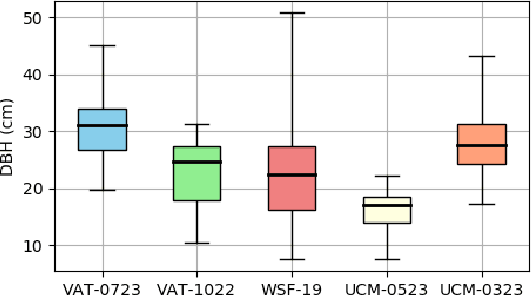
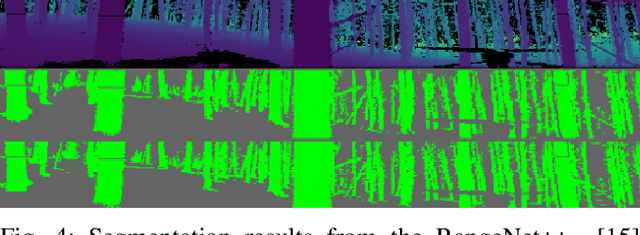
Data collection for forestry, timber, and agriculture currently relies on manual techniques which are labor-intensive and time-consuming. We seek to demonstrate that robotics offers improvements over these techniques and accelerate agricultural research, beginning with semantic segmentation and diameter estimation of trees in forests and orchards. We present TreeScope v1.0, the first robotics dataset for precision agriculture and forestry addressing the counting and mapping of trees in forestry and orchards. TreeScope provides LiDAR data from agricultural environments collected with robotics platforms, such as UAV and mobile robot platforms carried by vehicles and human operators. In the first release of this dataset, we provide ground-truth data with over 1,800 manually annotated semantic labels for tree stems and field-measured tree diameters. We share benchmark scripts for these tasks that researchers may use to evaluate the accuracy of their algorithms. Finally, we run our open-source diameter estimation and off-the-shelf semantic segmentation algorithms and share our baseline results.
DON-LSTM: Multi-Resolution Learning with DeepONets and Long Short-Term Memory Neural Networks
Oct 03, 2023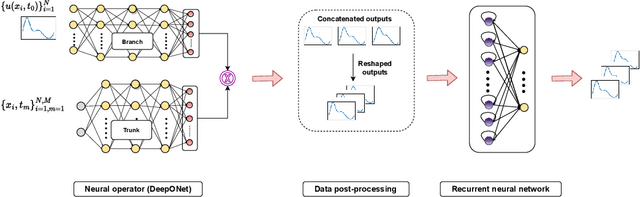
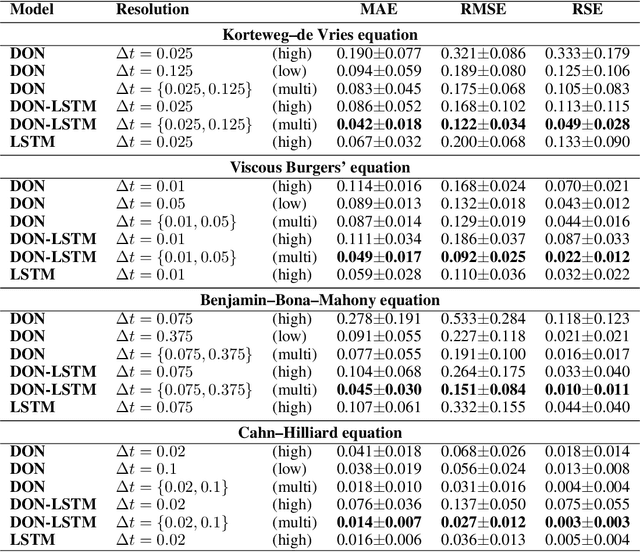
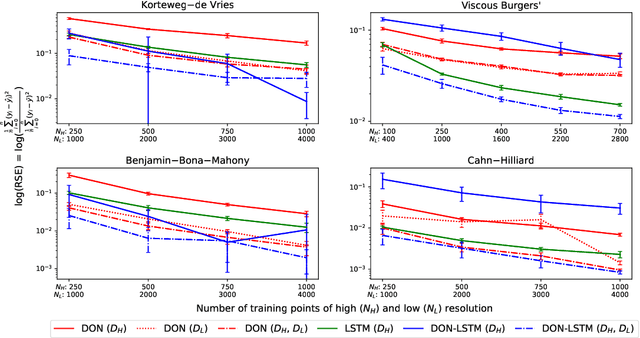
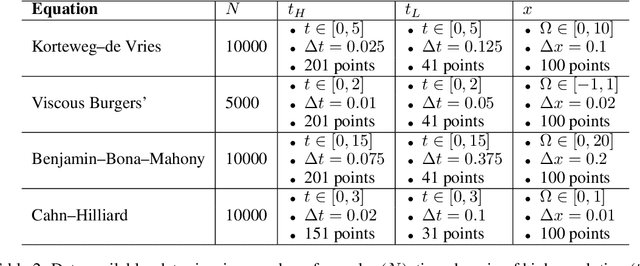
Deep operator networks (DeepONets, DONs) offer a distinct advantage over traditional neural networks in their ability to be trained on multi-resolution data. This property becomes especially relevant in real-world scenarios where high-resolution measurements are difficult to obtain, while low-resolution data is more readily available. Nevertheless, DeepONets alone often struggle to capture and maintain dependencies over long sequences compared to other state-of-the-art algorithms. We propose a novel architecture, named DON-LSTM, which extends the DeepONet with a long short-term memory network (LSTM). Combining these two architectures, we equip the network with explicit mechanisms to leverage multi-resolution data, as well as capture temporal dependencies in long sequences. We test our method on long-time-evolution modeling of multiple non-linear systems and show that the proposed multi-resolution DON-LSTM achieves significantly lower generalization error and requires fewer high-resolution samples compared to its vanilla counterparts.
Variational Gaussian approximation of the Kushner optimal filter
Oct 03, 2023In estimation theory, the Kushner equation provides the evolution of the probability density of the state of a dynamical system given continuous-time observations. Building upon our recent work, we propose a new way to approximate the solution of the Kushner equation through tractable variational Gaussian approximations of two proximal losses associated with the propagation and Bayesian update of the probability density. The first is a proximal loss based on the Wasserstein metric and the second is a proximal loss based on the Fisher metric. The solution to this last proximal loss is given by implicit updates on the mean and covariance that we proposed earlier. These two variational updates can be fused and shown to satisfy a set of stochastic differential equations on the Gaussian's mean and covariance matrix. This Gaussian flow is consistent with the Kalman-Bucy and Riccati flows in the linear case and generalize them in the nonlinear one.
OceanChat: Piloting Autonomous Underwater Vehicles in Natural Language
Sep 27, 2023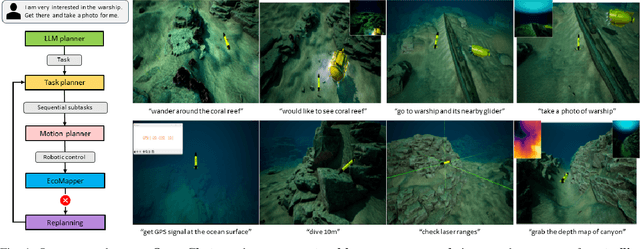
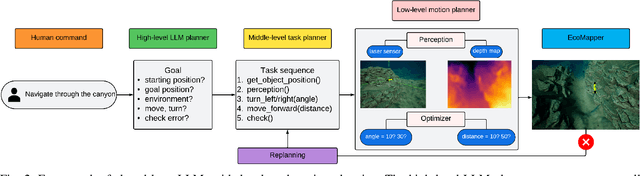
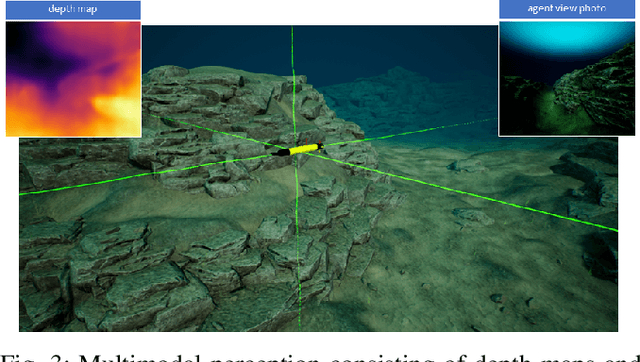
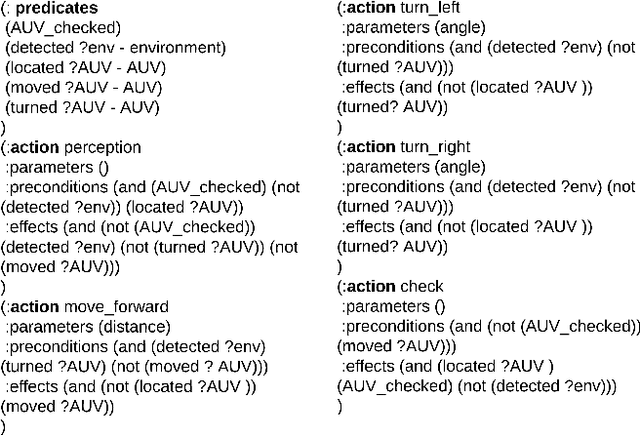
In the trending research of fusing Large Language Models (LLMs) and robotics, we aim to pave the way for innovative development of AI systems that can enable Autonomous Underwater Vehicles (AUVs) to seamlessly interact with humans in an intuitive manner. We propose OceanChat, a system that leverages a closed-loop LLM-guided task and motion planning framework to tackle AUV missions in the wild. LLMs translate an abstract human command into a high-level goal, while a task planner further grounds the goal into a task sequence with logical constraints. To assist the AUV with understanding the task sequence, we utilize a motion planner to incorporate real-time Lagrangian data streams received by the AUV, thus mapping the task sequence into an executable motion plan. Considering the highly dynamic and partially known nature of the underwater environment, an event-triggered replanning scheme is developed to enhance the system's robustness towards uncertainty. We also build a simulation platform HoloEco that generates photo-realistic simulation for a wide range of AUV applications. Experimental evaluation verifies that the proposed system can achieve improved performance in terms of both success rate and computation time. Project website: \url{https://sites.google.com/view/oceanchat}
SWoTTeD: An Extension of Tensor Decomposition to Temporal Phenotyping
Oct 02, 2023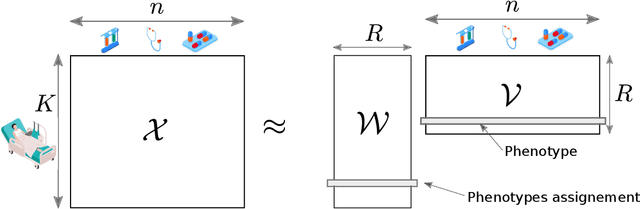
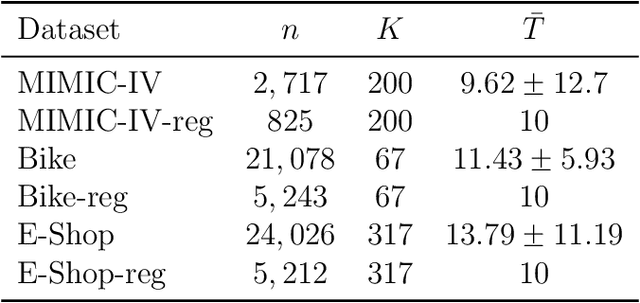
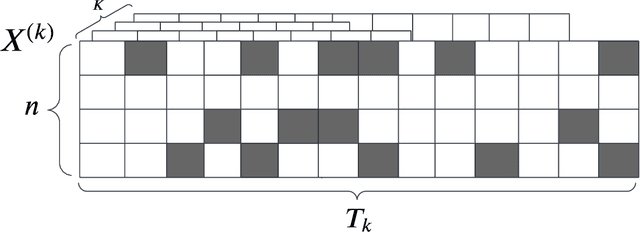
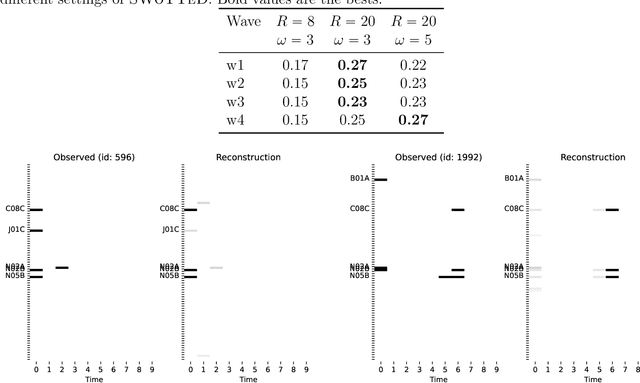
Tensor decomposition has recently been gaining attention in the machine learning community for the analysis of individual traces, such as Electronic Health Records (EHR). However, this task becomes significantly more difficult when the data follows complex temporal patterns. This paper introduces the notion of a temporal phenotype as an arrangement of features over time and it proposes SWoTTeD (Sliding Window for Temporal Tensor Decomposition), a novel method to discover hidden temporal patterns. SWoTTeD integrates several constraints and regularizations to enhance the interpretability of the extracted phenotypes. We validate our proposal using both synthetic and real-world datasets, and we present an original usecase using data from the Greater Paris University Hospital. The results show that SWoTTeD achieves at least as accurate reconstruction as recent state-of-the-art tensor decomposition models, and extracts temporal phenotypes that are meaningful for clinicians.
Safe Stabilizing Control for Polygonal Robots in Dynamic Elliptical Environments
Sep 30, 2023
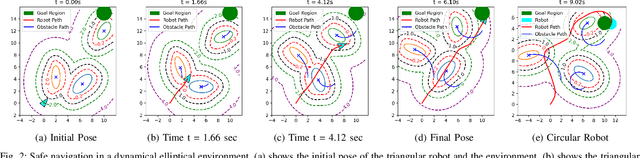
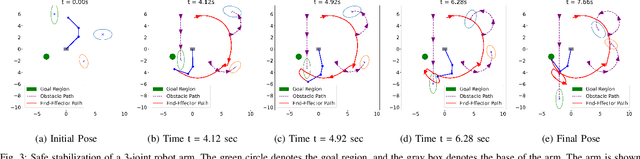
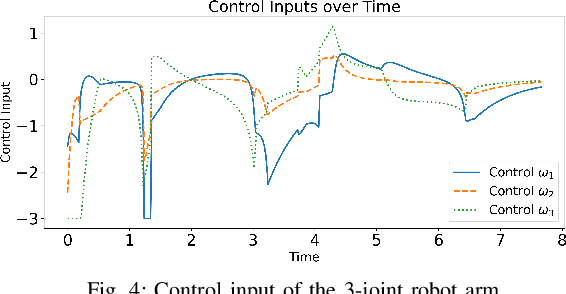
This paper addresses the challenge of safe navigation for rigid-body mobile robots in dynamic environments. We introduce an analytic approach to compute the distance between a polygon and an ellipse, and employ it to construct a control barrier function (CBF) for safe control synthesis. Existing CBF design methods for mobile robot obstacle avoidance usually assume point or circular robots, preventing their applicability to more realistic robot body geometries. Our work enables CBF designs that capture complex robot and obstacle shapes. We demonstrate the effectiveness of our approach in simulations highlighting real-time obstacle avoidance in constrained and dynamic environments for both mobile robots and multi-joint robot arms.
Fast-dRRT*: Efficient Multi-Robot Motion Planning for Automated Industrial Manufacturing
Sep 19, 2023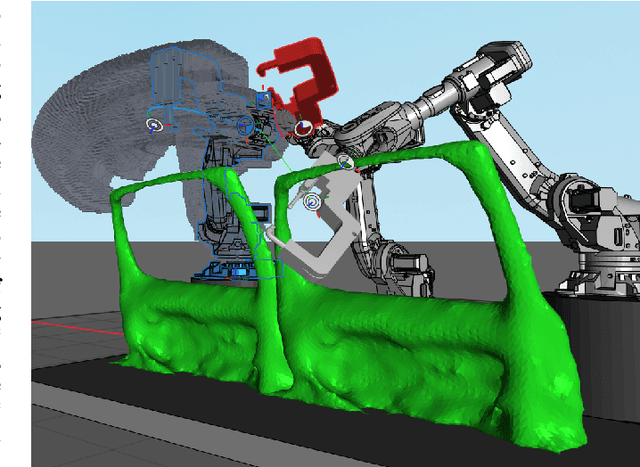
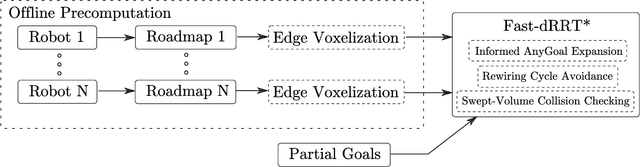
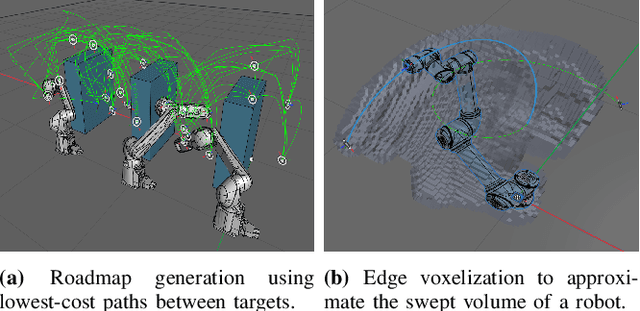
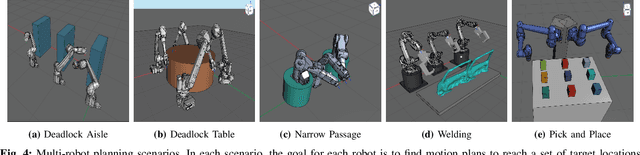
We present Fast-dRRT*, a sampling-based multi-robot planner, for real-time industrial automation scenarios. Fast-dRRT* builds upon the discrete rapidly-exploring random tree (dRRT*) planner, and extends dRRT* by using pre-computed swept volumes for efficient collision detection, deadlock avoidance for partial multi-robot problems, and a simplified rewiring strategy. We evaluate Fast-dRRT* on five challenging multi-robot scenarios using two to four industrial robot arms from various manufacturers. The scenarios comprise situations involving deadlocks, narrow passages, and close proximity tasks. The results are compared against dRRT*, and show Fast-dRRT* to outperform dRRT* by up to 94% in terms of finding solutions within given time limits, while only sacrificing up to 35% on initial solution cost. Furthermore, Fast-dRRT* demonstrates resilience against noise in target configurations, and is able to solve challenging welding, and pick and place tasks with reduced computational time. This makes Fast-dRRT* a promising option for real-time motion planning in industrial automation.