 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTACO: Task-Aware Column Description Generation Using LLMs
Jun 19, 2026Generating accurate and informative column descriptions (e.g. "membership status of customers" for the column name "cust_mem") is essential for a wide range of downstream NLP tasks on tabular data, including NL2SQL, table question answering, and entity linking. This problem arises in enterprises, domain sciences, government data portals, and so on. Despite its importance, most real-world datasets suffer from missing or cryptic documentation, often due to abbreviated column names or domain-specific jargon. Existing approaches largely rely on single-prompt large language models (LLMs), which struggle with three key issues: (i) inconsistent or incorrect handling of abbreviations, (ii) hallucinated or incomplete descriptions, and (iii) redundancy or vagueness that hinders downstream performance. We present TACO, a task-aware framework for automatic column description generation using LLMs. TACO introduces a three-step pipeline: (1) abbreviation expansion, which standardizes column names; (2) description generation, which produces initial semantic descriptions enriched with synonyms and search-oriented keywords; and (3) description revision, which refines these outputs using simulated downstream tasks. In addition, we investigate human-in-the-loop extensions and release new evaluation datasets for entity linking and schema enrichment. Extensive experiments across public and proprietary datasets show that TACO consistently outperforms existing methods, improving downstream task performance by up to 32%.
GEAR: Granularity-Adaptive Advantage Reweighting for LLM Agents via Self-Distillation
May 14, 2026Reinforcement learning has become a widely used post-training approach for LLM agents, where training commonly relies on outcome-level rewards that provide only coarse supervision. While finer-grained credit assignment is promising for effective policy updates, obtaining reliable local credit and assigning it to the right parts of the long-horizon trajectory remains an open challenge. In this paper, we propose Granularity-adaptivE Advantage Reweighting (GEAR), an adaptive-granularity credit assignment framework that reshapes the trajectory-level GRPO advantage using token- and segment-level signals derived from self-distillation. GEAR compares an on-policy student with a ground-truth-conditioned teacher to obtain a reference-guided divergence signal for identifying adaptive segment boundaries and modulating local advantage weights. This divergence often spikes at the onset of a semantic deviation, while later tokens in the same autoregressive continuation may return to low divergence. GEAR therefore treats such spikes as anchors for adaptive credit regions: where the student remains aligned with the teacher, token-level resolution is preserved; where it departs, GEAR groups the corresponding continuation into an adaptive segment and uses the divergence at the departure point to modulate the segment' s advantage. Experiments across eight mathematical reasoning and agentic tool-use benchmarks with Qwen3 4B and 8B models show that GEAR consistently outperforms standard GRPO, self-distillation-only baselines, and token- or turn-level credit-assignment methods. The gains are especially strong on benchmarks with lower GRPO baseline accuracy, reaching up to around 20\% over GRPO, suggesting that the proposed adaptive reweighting scheme is especially useful in more challenging long-horizon settings.
GAS: Enhancing Reward-Cost Balance of Generative Model-assisted Offline Safe RL
Feb 05, 2026Offline Safe Reinforcement Learning (OSRL) aims to learn a policy to achieve high performance in sequential decision-making while satisfying constraints, using only pre-collected datasets. Recent works, inspired by the strong capabilities of Generative Models (GMs), reformulate decision-making in OSRL as a conditional generative process, where GMs generate desirable actions conditioned on predefined reward and cost values. However, GM-assisted methods face two major challenges in OSRL: (1) lacking the ability to "stitch" optimal transitions from suboptimal trajectories within the dataset, and (2) struggling to balance reward targets with cost targets, particularly when they are conflict. To address these issues, we propose Goal-Assisted Stitching (GAS), a novel algorithm designed to enhance stitching capabilities while effectively balancing reward maximization and constraint satisfaction. To enhance the stitching ability, GAS first augments and relabels the dataset at the transition level, enabling the construction of high-quality trajectories from suboptimal ones. GAS also introduces novel goal functions, which estimate the optimal achievable reward and cost goals from the dataset. These goal functions, trained using expectile regression on the relabeled and augmented dataset, allow GAS to accommodate a broader range of reward-cost return pairs and achieve a better tradeoff between reward maximization and constraint satisfaction compared to human-specified values. The estimated goals then guide policy training, ensuring robust performance under constrained settings. Furthermore, to improve training stability and efficiency, we reshape the dataset to achieve a more uniform reward-cost return distribution. Empirical results validate the effectiveness of GAS, demonstrating superior performance in balancing reward maximization and constraint satisfaction compared to existing methods.
SIT-Graph: State Integrated Tool Graph for Multi-Turn Agents
Dec 08, 2025Despite impressive advances in agent systems, multi-turn tool-use scenarios remain challenging. It is mainly because intent is clarified progressively and the environment evolves with each tool call. While reusing past experience is natural, current LLM agents either treat entire trajectories or pre-defined subtasks as indivisible units, or solely exploit tool-to-tool dependencies, hindering adaptation as states and information evolve across turns. In this paper, we propose a State Integrated Tool Graph (SIT-Graph), which enhances multi-turn tool use by exploiting partially overlapping experience. Inspired by human decision-making that integrates episodic and procedural memory, SIT-Graph captures both compact state representations (episodic-like fragments) and tool-to-tool dependencies (procedural-like routines) from historical trajectories. Specifically, we first build a tool graph from accumulated tool-use sequences, and then augment each edge with a compact state summary of the dialog and tool history that may shape the next action. At inference time, SIT-Graph enables a human-like balance between episodic recall and procedural execution: when the next decision requires recalling prior context, the agent retrieves the state summaries stored on relevant edges and uses them to guide its next action; when the step is routine, it follows high-confidence tool dependencies without explicit recall. Experiments across multiple stateful multi-turn tool-use benchmarks show that SIT-Graph consistently outperforms strong memory- and graph-based baselines, delivering more robust tool selection and more effective experience transfer.
Structure-Aware Automatic Channel Pruning by Searching with Graph Embedding
Jun 13, 2025Channel pruning is a powerful technique to reduce the computational overhead of deep neural networks, enabling efficient deployment on resource-constrained devices. However, existing pruning methods often rely on local heuristics or weight-based criteria that fail to capture global structural dependencies within the network, leading to suboptimal pruning decisions and degraded model performance. To address these limitations, we propose a novel structure-aware automatic channel pruning (SACP) framework that utilizes graph convolutional networks (GCNs) to model the network topology and learn the global importance of each channel. By encoding structural relationships within the network, our approach implements topology-aware pruning and this pruning is fully automated, reducing the need for human intervention. We restrict the pruning rate combinations to a specific space, where the number of combinations can be dynamically adjusted, and use a search-based approach to determine the optimal pruning rate combinations. Extensive experiments on benchmark datasets (CIFAR-10, ImageNet) with various models (ResNet, VGG16) demonstrate that SACP outperforms state-of-the-art pruning methods on compression efficiency and competitive on accuracy retention.
ECLAIR: Enhanced Clarification for Interactive Responses
Mar 19, 2025



We present ECLAIR (Enhanced CLArification for Interactive Responses), a novel unified and end-to-end framework for interactive disambiguation in enterprise AI assistants. ECLAIR generates clarification questions for ambiguous user queries and resolves ambiguity based on the user's response.We introduce a generalized architecture capable of integrating ambiguity information from multiple downstream agents, enhancing context-awareness in resolving ambiguities and allowing enterprise specific definition of agents. We further define agents within our system that provide domain-specific grounding information. We conduct experiments comparing ECLAIR to few-shot prompting techniques and demonstrate ECLAIR's superior performance in clarification question generation and ambiguity resolution.
TSDS: Data Selection for Task-Specific Model Finetuning
Oct 23, 2024



Finetuning foundation models for specific tasks is an emerging paradigm in modern machine learning. The efficacy of task-specific finetuning largely depends on the selection of appropriate training data. We present TSDS (Task-Specific Data Selection), a framework to select data for task-specific model finetuning, guided by a small but representative set of examples from the target task. To do so, we formulate data selection for task-specific finetuning as an optimization problem with a distribution alignment loss based on optimal transport to capture the discrepancy between the selected data and the target distribution. In addition, we add a regularizer to encourage the diversity of the selected data and incorporate kernel density estimation into the regularizer to reduce the negative effects of near-duplicates among the candidate data. We connect our optimization problem to nearest neighbor search and design efficient algorithms to compute the optimal solution based on approximate nearest neighbor search techniques. We evaluate our method on data selection for both continued pretraining and instruction tuning of language models. We show that instruction tuning using data selected by our method with a 1% selection ratio often outperforms using the full dataset and beats the baseline selection methods by 1.5 points in F1 score on average.
Data Selection for Task-Specific Model Finetuning
Oct 15, 2024Finetuning foundation models for specific tasks is an emerging paradigm in modern machine learning. The efficacy of task-specific finetuning largely depends on the selection of appropriate training data. We present a framework to select data for task-specific model finetuning, guided by a small but representative set of examples from the target task. To do so, we formulate data selection for task-specific finetuning as an optimization problem with a distribution alignment loss based on optimal transport to capture the discrepancy between the selected data and the target distribution. In addition, we add a regularizer to encourage the diversity of the selected data and incorporate kernel density estimation into the regularizer to reduce the negative effects of near-duplicates among the candidate data. We connect our optimization problem to nearest neighbor search and design efficient algorithms to compute the optimal solution based on approximate nearest neighbor search techniques. We evaluate our method on data selection for both continued pretraining and instruction tuning of language models. We show that instruction tuning using data selected by our method with a 1% selection ratio often outperforms using the full dataset and beats the baseline selection methods by 1.5 points in F1 score on average.
Reinforcement Learning with Intrinsically Motivated Feedback Graph for Lost-sales Inventory Control
Jun 26, 2024


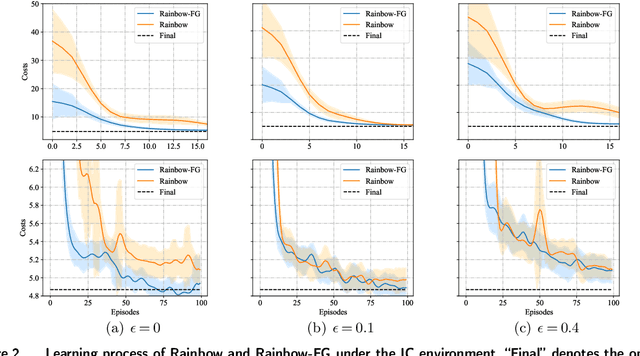
Reinforcement learning (RL) has proven to be well-performed and general-purpose in the inventory control (IC). However, further improvement of RL algorithms in the IC domain is impeded due to two limitations of online experience. First, online experience is expensive to acquire in real-world applications. With the low sample efficiency nature of RL algorithms, it would take extensive time to train the RL policy to convergence. Second, online experience may not reflect the true demand due to the lost sales phenomenon typical in IC, which makes the learning process more challenging. To address the above challenges, we propose a decision framework that combines reinforcement learning with feedback graph (RLFG) and intrinsically motivated exploration (IME) to boost sample efficiency. In particular, we first take advantage of the inherent properties of lost-sales IC problems and design the feedback graph (FG) specially for lost-sales IC problems to generate abundant side experiences aid RL updates. Then we conduct a rigorous theoretical analysis of how the designed FG reduces the sample complexity of RL methods. Based on the theoretical insights, we design an intrinsic reward to direct the RL agent to explore to the state-action space with more side experiences, further exploiting FG's power. Experimental results demonstrate that our method greatly improves the sample efficiency of applying RL in IC. Our code is available at https://anonymous.4open.science/r/RLIMFG4IC-811D/
Individual Contributions as Intrinsic Exploration Scaffolds for Multi-agent Reinforcement Learning
May 28, 2024



In multi-agent reinforcement learning (MARL), effective exploration is critical, especially in sparse reward environments. Although introducing global intrinsic rewards can foster exploration in such settings, it often complicates credit assignment among agents. To address this difficulty, we propose Individual Contributions as intrinsic Exploration Scaffolds (ICES), a novel approach to motivate exploration by assessing each agent's contribution from a global view. In particular, ICES constructs exploration scaffolds with Bayesian surprise, leveraging global transition information during centralized training. These scaffolds, used only in training, help to guide individual agents towards actions that significantly impact the global latent state transitions. Additionally, ICES separates exploration policies from exploitation policies, enabling the former to utilize privileged global information during training. Extensive experiments on cooperative benchmark tasks with sparse rewards, including Google Research Football (GRF) and StarCraft Multi-agent Challenge (SMAC), demonstrate that ICES exhibits superior exploration capabilities compared with baselines. The code is publicly available at https://github.com/LXXXXR/ICES.