 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMAP-VLA: Memory-Augmented Prompting for Vision-Language-Action Model in Robotic Manipulation
Nov 12, 2025Pre-trained Vision-Language-Action (VLA) models have achieved remarkable success in improving robustness and generalization for end-to-end robotic manipulation. However, these models struggle with long-horizon tasks due to their lack of memory and reliance solely on immediate sensory inputs. To address this limitation, we propose Memory-Augmented Prompting for Vision-Language-Action model (MAP-VLA), a novel framework that empowers pre-trained VLA models with demonstration-derived memory prompts to augment action generation for long-horizon robotic manipulation tasks. To achieve this, MAP-VLA first constructs a memory library from historical demonstrations, where each memory unit captures information about a specific stage of a task. These memory units are implemented as learnable soft prompts optimized through prompt tuning. Then, during real-time task execution, MAP-VLA retrieves relevant memory through trajectory similarity matching and dynamically integrates it into the VLA model for augmented action generation. Importantly, this prompt tuning and retrieval augmentation approach operates as a plug-and-play module for a frozen VLA model, offering a lightweight and flexible solution to improve task performance. Experimental results show that MAP-VLA delivers up to 7.0% absolute performance gains in the simulation benchmark and 25.0% on real robot evaluations for long-horizon tasks, surpassing the current state-of-the-art methods.
VLA-Reasoner: Empowering Vision-Language-Action Models with Reasoning via Online Monte Carlo Tree Search
Sep 26, 2025Vision-Language-Action models (VLAs) achieve strong performance in general robotic manipulation tasks by scaling imitation learning. However, existing VLAs are limited to predicting short-sighted next-action, which struggle with long-horizon trajectory tasks due to incremental deviations. To address this problem, we propose a plug-in framework named VLA-Reasoner that effectively empowers off-the-shelf VLAs with the capability of foreseeing future states via test-time scaling. Specifically, VLA-Reasoner samples and rolls out possible action trajectories where involved actions are rationales to generate future states via a world model, which enables VLA-Reasoner to foresee and reason potential outcomes and search for the optimal actions. We further leverage Monte Carlo Tree Search (MCTS) to improve search efficiency in large action spaces, where stepwise VLA predictions seed the root. Meanwhile, we introduce a confidence sampling mechanism based on Kernel Density Estimation (KDE), to enable efficient exploration in MCTS without redundant VLA queries. We evaluate intermediate states in MCTS via an offline reward shaping strategy, to score predicted futures and correct deviations with long-term feedback. We conducted extensive experiments in both simulators and the real world, demonstrating that our proposed VLA-Reasoner achieves significant improvements over the state-of-the-art VLAs. Our method highlights a potential pathway toward scalable test-time computation of robotic manipulation.
ScaleCUA: Scaling Open-Source Computer Use Agents with Cross-Platform Data
Sep 18, 2025



Vision-Language Models (VLMs) have enabled computer use agents (CUAs) that operate GUIs autonomously, showing great potential, yet progress is limited by the lack of large-scale, open-source computer use data and foundation models. In this work, we introduce ScaleCUA, a step toward scaling open-source CUAs. It offers a large-scale dataset spanning 6 operating systems and 3 task domains, built via a closed-loop pipeline uniting automated agents with human experts. Trained on this scaled-up data, ScaleCUA can operate seamlessly across platforms. Specifically, it delivers strong gains over baselines (+26.6 on WebArena-Lite-v2, +10.7 on ScreenSpot-Pro) and sets new state-of-the-art results (94.4% on MMBench-GUI L1-Hard, 60.6% on OSWorld-G, 47.4% on WebArena-Lite-v2). These findings underscore the power of data-driven scaling for general-purpose computer use agents. We will release data, models, and code to advance future research: https://github.com/OpenGVLab/ScaleCUA.
Schema Inference for Tabular Data Repositories Using Large Language Models
Sep 04, 2025Minimally curated tabular data often contain representational inconsistencies across heterogeneous sources, and are accompanied by sparse metadata. Working with such data is intimidating. While prior work has advanced dataset discovery and exploration, schema inference remains difficult when metadata are limited. We present SI-LLM (Schema Inference using Large Language Models), which infers a concise conceptual schema for tabular data using only column headers and cell values. The inferred schema comprises hierarchical entity types, attributes, and inter-type relationships. In extensive evaluation on two datasets from web tables and open data, SI-LLM achieves promising end-to-end results, as well as better or comparable results to state-of-the-art methods at each step. All source code, full prompts, and datasets of SI-LLM are available at https://github.com/PierreWoL/SILLM.
InternVL3.5: Advancing Open-Source Multimodal Models in Versatility, Reasoning, and Efficiency
Aug 25, 2025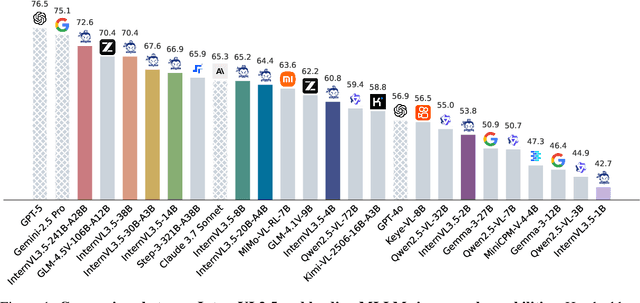
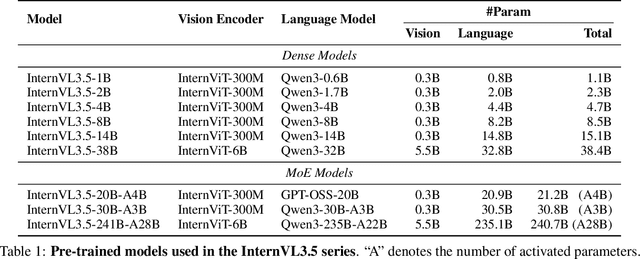
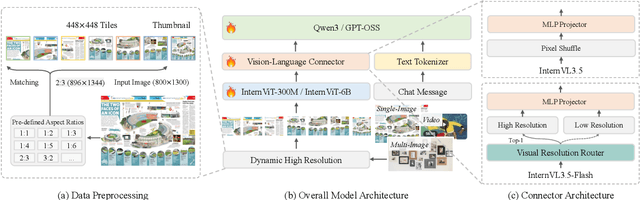
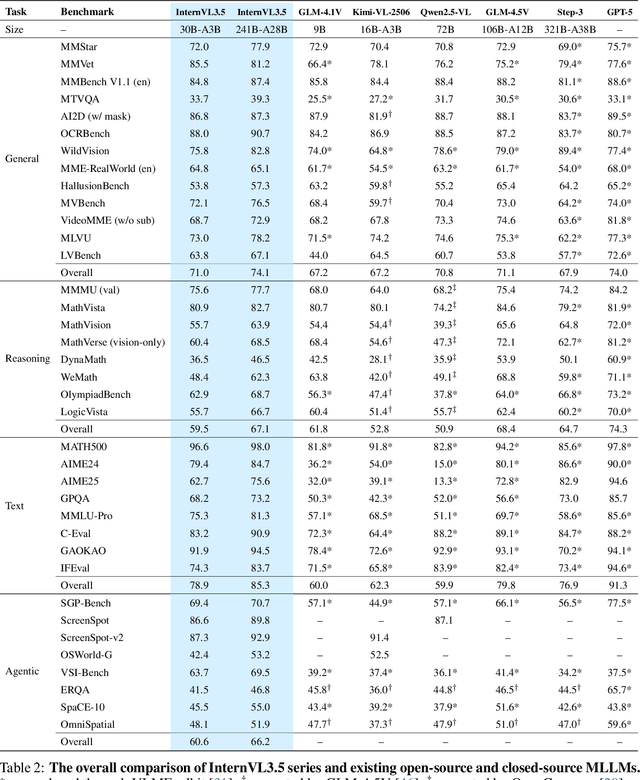
We introduce InternVL 3.5, a new family of open-source multimodal models that significantly advances versatility, reasoning capability, and inference efficiency along the InternVL series. A key innovation is the Cascade Reinforcement Learning (Cascade RL) framework, which enhances reasoning through a two-stage process: offline RL for stable convergence and online RL for refined alignment. This coarse-to-fine training strategy leads to substantial improvements on downstream reasoning tasks, e.g., MMMU and MathVista. To optimize efficiency, we propose a Visual Resolution Router (ViR) that dynamically adjusts the resolution of visual tokens without compromising performance. Coupled with ViR, our Decoupled Vision-Language Deployment (DvD) strategy separates the vision encoder and language model across different GPUs, effectively balancing computational load. These contributions collectively enable InternVL3.5 to achieve up to a +16.0\% gain in overall reasoning performance and a 4.05$\times$ inference speedup compared to its predecessor, i.e., InternVL3. In addition, InternVL3.5 supports novel capabilities such as GUI interaction and embodied agency. Notably, our largest model, i.e., InternVL3.5-241B-A28B, attains state-of-the-art results among open-source MLLMs across general multimodal, reasoning, text, and agentic tasks -- narrowing the performance gap with leading commercial models like GPT-5. All models and code are publicly released.
SafeBimanual: Diffusion-based Trajectory Optimization for Safe Bimanual Manipulation
Aug 25, 2025Bimanual manipulation has been widely applied in household services and manufacturing, which enables the complex task completion with coordination requirements. Recent diffusion-based policy learning approaches have achieved promising performance in modeling action distributions for bimanual manipulation. However, they ignored the physical safety constraints of bimanual manipulation, which leads to the dangerous behaviors with damage to robots and objects. To this end, we propose a test-time trajectory optimization framework named SafeBimanual for any pre-trained diffusion-based bimanual manipulation policies, which imposes the safety constraints on bimanual actions to avoid dangerous robot behaviors with improved success rate. Specifically, we design diverse cost functions for safety constraints in different dual-arm cooperation patterns including avoidance of tearing objects and collision between arms and objects, which optimizes the manipulator trajectories with guided sampling of diffusion denoising process. Moreover, we employ a vision-language model (VLM) to schedule the cost functions by specifying keypoints and corresponding pairwise relationship, so that the optimal safety constraint is dynamically generated in the entire bimanual manipulation process. SafeBimanual demonstrates superiority on 8 simulated tasks in RoboTwin with a 13.7% increase in success rate and a 18.8% reduction in unsafe interactions over state-of-the-art diffusion-based methods. Extensive experiments on 4 real-world tasks further verify its practical value by improving the success rate by 32.5%.
Superpixel-informed Continuous Low-Rank Tensor Representation for Multi-Dimensional Data Recovery
Aug 17, 2025



Low-rank tensor representation (LRTR) has emerged as a powerful tool for multi-dimensional data processing. However, classical LRTR-based methods face two critical limitations: (1) they typically assume that the holistic data is low-rank, this assumption is often violated in real-world scenarios with significant spatial variations; and (2) they are constrained to discrete meshgrid data, limiting their flexibility and applicability. To overcome these limitations, we propose a Superpixel-informed Continuous low-rank Tensor Representation (SCTR) framework, which enables continuous and flexible modeling of multi-dimensional data beyond traditional grid-based constraints. Our approach introduces two main innovations: First, motivated by the observation that semantically coherent regions exhibit stronger low-rank characteristics than holistic data, we employ superpixels as the basic modeling units. This design not only encodes rich semantic information, but also enhances adaptability to diverse forms of data streams. Second, we propose a novel asymmetric low-rank tensor factorization (ALTF) where superpixel-specific factor matrices are parameterized by a shared neural network with specialized heads. By strategically separating global pattern learning from local adaptation, this framework efficiently captures both cross-superpixel commonalities and within-superpixel variations. This yields a representation that is both highly expressive and compact, balancing model efficiency with adaptability. Extensive experiments on several benchmark datasets demonstrate that SCTR achieves 3-5 dB PSNR improvements over existing LRTR-based methods across multispectral images, videos, and color images.
UniLGL: Learning Uniform Place Recognition for FOV-limited/Panoramic LiDAR Global Localization
Jul 16, 2025Existing LGL methods typically consider only partial information (e.g., geometric features) from LiDAR observations or are designed for homogeneous LiDAR sensors, overlooking the uniformity in LGL. In this work, a uniform LGL method is proposed, termed UniLGL, which simultaneously achieves spatial and material uniformity, as well as sensor-type uniformity. The key idea of the proposed method is to encode the complete point cloud, which contains both geometric and material information, into a pair of BEV images (i.e., a spatial BEV image and an intensity BEV image). An end-to-end multi-BEV fusion network is designed to extract uniform features, equipping UniLGL with spatial and material uniformity. To ensure robust LGL across heterogeneous LiDAR sensors, a viewpoint invariance hypothesis is introduced, which replaces the conventional translation equivariance assumption commonly used in existing LPR networks and supervises UniLGL to achieve sensor-type uniformity in both global descriptors and local feature representations. Finally, based on the mapping between local features on the 2D BEV image and the point cloud, a robust global pose estimator is derived that determines the global minimum of the global pose on SE(3) without requiring additional registration. To validate the effectiveness of the proposed uniform LGL, extensive benchmarks are conducted in real-world environments, and the results show that the proposed UniLGL is demonstratively competitive compared to other State-of-the-Art LGL methods. Furthermore, UniLGL has been deployed on diverse platforms, including full-size trucks and agile Micro Aerial Vehicles (MAVs), to enable high-precision localization and mapping as well as multi-MAV collaborative exploration in port and forest environments, demonstrating the applicability of UniLGL in industrial and field scenarios.
ScienceBoard: Evaluating Multimodal Autonomous Agents in Realistic Scientific Workflows
May 26, 2025



Large Language Models (LLMs) have extended their impact beyond Natural Language Processing, substantially fostering the development of interdisciplinary research. Recently, various LLM-based agents have been developed to assist scientific discovery progress across multiple aspects and domains. Among these, computer-using agents, capable of interacting with operating systems as humans do, are paving the way to automated scientific problem-solving and addressing routines in researchers' workflows. Recognizing the transformative potential of these agents, we introduce ScienceBoard, which encompasses two complementary contributions: (i) a realistic, multi-domain environment featuring dynamic and visually rich scientific workflows with integrated professional software, where agents can autonomously interact via different interfaces to accelerate complex research tasks and experiments; and (ii) a challenging benchmark of 169 high-quality, rigorously validated real-world tasks curated by humans, spanning scientific-discovery workflows in domains such as biochemistry, astronomy, and geoinformatics. Extensive evaluations of agents with state-of-the-art backbones (e.g., GPT-4o, Claude 3.7, UI-TARS) show that, despite some promising results, they still fall short of reliably assisting scientists in complex workflows, achieving only a 15% overall success rate. In-depth analysis further provides valuable insights for addressing current agent limitations and more effective design principles, paving the way to build more capable agents for scientific discovery. Our code, environment, and benchmark are at https://qiushisun.github.io/ScienceBoard-Home/.
Towards NSFW-Free Text-to-Image Generation via Safety-Constraint Direct Preference Optimization
Apr 19, 2025



Ensuring the safety of generated content remains a fundamental challenge for Text-to-Image (T2I) generation. Existing studies either fail to guarantee complete safety under potentially harmful concepts or struggle to balance safety with generation quality. To address these issues, we propose Safety-Constrained Direct Preference Optimization (SC-DPO), a novel framework for safety alignment in T2I models. SC-DPO integrates safety constraints into the general human preference calibration, aiming to maximize the likelihood of generating human-preferred samples while minimizing the safety cost of the generated outputs. In SC-DPO, we introduce a safety cost model to accurately quantify harmful levels for images, and train it effectively using the proposed contrastive learning and cost anchoring objectives. To apply SC-DPO for effective T2I safety alignment, we constructed SCP-10K, a safety-constrained preference dataset containing rich harmful concepts, which blends safety-constrained preference pairs under both harmful and clean instructions, further mitigating the trade-off between safety and sample quality. Additionally, we propose a Dynamic Focusing Mechanism (DFM) for SC-DPO, promoting the model's learning of difficult preference pair samples. Extensive experiments demonstrate that SC-DPO outperforms existing methods, effectively defending against various NSFW content while maintaining optimal sample quality and human preference alignment. Additionally, SC-DPO exhibits resilience against adversarial prompts designed to generate harmful content.