 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHyperGCT: A Dynamic Hyper-GNN-Learned Geometric Constraint for 3D Registration
Mar 04, 2025



Geometric constraints between feature matches are critical in 3D point cloud registration problems. Existing approaches typically model unordered matches as a consistency graph and sample consistent matches to generate hypotheses. However, explicit graph construction introduces noise, posing great challenges for handcrafted geometric constraints to render consistency among matches. To overcome this, we propose HyperGCT, a flexible dynamic Hyper-GNN-learned geometric constraint that leverages high-order consistency among 3D correspondences. To our knowledge, HyperGCT is the first method that mines robust geometric constraints from dynamic hypergraphs for 3D registration. By dynamically optimizing the hypergraph through vertex and edge feature aggregation, HyperGCT effectively captures the correlations among correspondences, leading to accurate hypothesis generation. Extensive experiments on 3DMatch, 3DLoMatch, KITTI-LC, and ETH show that HyperGCT achieves state-of-the-art performance. Furthermore, our method is robust to graph noise, demonstrating a significant advantage in terms of generalization. The code will be released.
Building Machine Learning Challenges for Anomaly Detection in Science
Mar 03, 2025
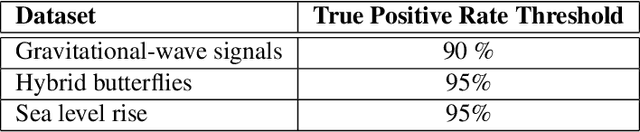


Scientific discoveries are often made by finding a pattern or object that was not predicted by the known rules of science. Oftentimes, these anomalous events or objects that do not conform to the norms are an indication that the rules of science governing the data are incomplete, and something new needs to be present to explain these unexpected outliers. The challenge of finding anomalies can be confounding since it requires codifying a complete knowledge of the known scientific behaviors and then projecting these known behaviors on the data to look for deviations. When utilizing machine learning, this presents a particular challenge since we require that the model not only understands scientific data perfectly but also recognizes when the data is inconsistent and out of the scope of its trained behavior. In this paper, we present three datasets aimed at developing machine learning-based anomaly detection for disparate scientific domains covering astrophysics, genomics, and polar science. We present the different datasets along with a scheme to make machine learning challenges around the three datasets findable, accessible, interoperable, and reusable (FAIR). Furthermore, we present an approach that generalizes to future machine learning challenges, enabling the possibility of large, more compute-intensive challenges that can ultimately lead to scientific discovery.
Mitigating Lost-in-Retrieval Problems in Retrieval Augmented Multi-Hop Question Answering
Feb 20, 2025



In this paper, we identify a critical problem, "lost-in-retrieval", in retrieval-augmented multi-hop question answering (QA): the key entities are missed in LLMs' sub-question decomposition. "Lost-in-retrieval" significantly degrades the retrieval performance, which disrupts the reasoning chain and leads to the incorrect answers. To resolve this problem, we propose a progressive retrieval and rewriting method, namely ChainRAG, which sequentially handles each sub-question by completing missing key entities and retrieving relevant sentences from a sentence graph for answer generation. Each step in our retrieval and rewriting process builds upon the previous one, creating a seamless chain that leads to accurate retrieval and answers. Finally, all retrieved sentences and sub-question answers are integrated to generate a comprehensive answer to the original question. We evaluate ChainRAG on three multi-hop QA datasets$\unicode{x2013}$MuSiQue, 2Wiki, and HotpotQA$\unicode{x2013}$using three large language models: GPT4o-mini, Qwen2.5-72B, and GLM-4-Plus. Empirical results demonstrate that ChainRAG consistently outperforms baselines in both effectiveness and efficiency.
Knowledge Graph-Guided Retrieval Augmented Generation
Feb 08, 2025Retrieval-augmented generation (RAG) has emerged as a promising technology for addressing hallucination issues in the responses generated by large language models (LLMs). Existing studies on RAG primarily focus on applying semantic-based approaches to retrieve isolated relevant chunks, which ignore their intrinsic relationships. In this paper, we propose a novel Knowledge Graph-Guided Retrieval Augmented Generation (KG$^2$RAG) framework that utilizes knowledge graphs (KGs) to provide fact-level relationships between chunks, improving the diversity and coherence of the retrieved results. Specifically, after performing a semantic-based retrieval to provide seed chunks, KG$^2$RAG employs a KG-guided chunk expansion process and a KG-based chunk organization process to deliver relevant and important knowledge in well-organized paragraphs. Extensive experiments conducted on the HotpotQA dataset and its variants demonstrate the advantages of KG$^2$RAG compared to existing RAG-based approaches, in terms of both response quality and retrieval quality.
QMe14S, A Comprehensive and Efficient Spectral Dataset for Small Organic Molecules
Jan 31, 2025



Developing machine learning protocols for molecular simulations requires comprehensive and efficient datasets. Here we introduce the QMe14S dataset, comprising 186,102 small organic molecules featuring 14 elements (H, B, C, N, O, F, Al, Si, P, S, Cl, As, Se, Br) and 47 functional groups. Using density functional theory at the B3LYP/TZVP level, we optimized the geometries and calculated properties including energy, atomic charge, atomic force, dipole moment, quadrupole moment, polarizability, octupole moment, first hyperpolarizability, and Hessian. At the same level, we obtained the harmonic IR, Raman and NMR spectra. Furthermore, we conducted ab initio molecular dynamics simulations to generate dynamic configurations and extract nonequilibrium properties, including energy, forces, and Hessians. By leveraging our E(3)-equivariant message-passing neural network (DetaNet), we demonstrated that models trained on QMe14S outperform those trained on the previously developed QM9S dataset in simulating molecular spectra. The QMe14S dataset thus serves as a comprehensive benchmark for molecular simulations, offering valuable insights into structure-property relationships.
Controllable Protein Sequence Generation with LLM Preference Optimization
Jan 25, 2025Designing proteins with specific attributes offers an important solution to address biomedical challenges. Pre-trained protein large language models (LLMs) have shown promising results on protein sequence generation. However, to control sequence generation for specific attributes, existing work still exhibits poor functionality and structural stability. In this paper, we propose a novel controllable protein design method called CtrlProt. We finetune a protein LLM with a new multi-listwise preference optimization strategy to improve generation quality and support multi-attribute controllable generation. Experiments demonstrate that CtrlProt can meet functionality and structural stability requirements effectively, achieving state-of-the-art performance in both single-attribute and multi-attribute protein sequence generation.
Deep Learning and Foundation Models for Weather Prediction: A Survey
Jan 12, 2025Physics-based numerical models have been the bedrock of atmospheric sciences for decades, offering robust solutions but often at the cost of significant computational resources. Deep learning (DL) models have emerged as powerful tools in meteorology, capable of analyzing complex weather and climate data by learning intricate dependencies and providing rapid predictions once trained. While these models demonstrate promising performance in weather prediction, often surpassing traditional physics-based methods, they still face critical challenges. This paper presents a comprehensive survey of recent deep learning and foundation models for weather prediction. We propose a taxonomy to classify existing models based on their training paradigms: deterministic predictive learning, probabilistic generative learning, and pre-training and fine-tuning. For each paradigm, we delve into the underlying model architectures, address major challenges, offer key insights, and propose targeted directions for future research. Furthermore, we explore real-world applications of these methods and provide a curated summary of open-source code repositories and widely used datasets, aiming to bridge research advancements with practical implementations while fostering open and trustworthy scientific practices in adopting cutting-edge artificial intelligence for weather prediction. The related sources are available at https://github.com/JimengShi/ DL-Foundation-Models-Weather.
Multi-scale Latent Point Consistency Models for 3D Shape Generation
Dec 27, 2024Consistency Models (CMs) have significantly accelerated the sampling process in diffusion models, yielding impressive results in synthesizing high-resolution images. To explore and extend these advancements to point-cloud-based 3D shape generation, we propose a novel Multi-scale Latent Point Consistency Model (MLPCM). Our MLPCM follows a latent diffusion framework and introduces hierarchical levels of latent representations, ranging from point-level to super-point levels, each corresponding to a different spatial resolution. We design a multi-scale latent integration module along with 3D spatial attention to effectively denoise the point-level latent representations conditioned on those from multiple super-point levels. Additionally, we propose a latent consistency model, learned through consistency distillation, that compresses the prior into a one-step generator. This significantly improves sampling efficiency while preserving the performance of the original teacher model. Extensive experiments on standard benchmarks ShapeNet and ShapeNet-Vol demonstrate that MLPCM achieves a 100x speedup in the generation process, while surpassing state-of-the-art diffusion models in terms of both shape quality and diversity.
Improving the Transferability of 3D Point Cloud Attack via Spectral-aware Admix and Optimization Designs
Dec 17, 2024Deep learning models for point clouds have shown to be vulnerable to adversarial attacks, which have received increasing attention in various safety-critical applications such as autonomous driving, robotics, and surveillance. Existing 3D attackers generally design various attack strategies in the white-box setting, requiring the prior knowledge of 3D model details. However, real-world 3D applications are in the black-box setting, where we can only acquire the outputs of the target classifier. Although few recent works try to explore the black-box attack, they still achieve limited attack success rates (ASR). To alleviate this issue, this paper focuses on attacking the 3D models in a transfer-based black-box setting, where we first carefully design adversarial examples in a white-box surrogate model and then transfer them to attack other black-box victim models. Specifically, we propose a novel Spectral-aware Admix with Augmented Optimization method (SAAO) to improve the adversarial transferability. In particular, since traditional Admix strategy are deployed in the 2D domain that adds pixel-wise images for perturbing, we can not directly follow it to merge point clouds in coordinate domain as it will destroy the geometric shapes. Therefore, we design spectral-aware fusion that performs Graph Fourier Transform (GFT) to get spectral features of the point clouds and add them in the spectral domain. Afterward, we run a few steps with spectral-aware weighted Admix to select better optimization paths as well as to adjust corresponding learning weights. At last, we run more steps to generate adversarial spectral feature along the optimization path and perform Inverse-GFT on the adversarial spectral feature to obtain the adversarial example in the data domain. Experiments show that our SAAO achieves better transferability compared to existing 3D attack methods.
Hard-Label Black-Box Attacks on 3D Point Clouds
Nov 30, 2024



With the maturity of depth sensors in various 3D safety-critical applications, 3D point cloud models have been shown to be vulnerable to adversarial attacks. Almost all existing 3D attackers simply follow the white-box or black-box setting to iteratively update coordinate perturbations based on back-propagated or estimated gradients. However, these methods are hard to deploy in real-world scenarios (no model details are provided) as they severely rely on parameters or output logits of victim models. To this end, we propose point cloud attacks from a more practical setting, i.e., hard-label black-box attack, in which attackers can only access the prediction label of 3D input. We introduce a novel 3D attack method based on a new spectrum-aware decision boundary algorithm to generate high-quality adversarial samples. In particular, we first construct a class-aware model decision boundary, by developing a learnable spectrum-fusion strategy to adaptively fuse point clouds of different classes in the spectral domain, aiming to craft their intermediate samples without distorting the original geometry. Then, we devise an iterative coordinate-spectrum optimization method with curvature-aware boundary search to move the intermediate sample along the decision boundary for generating adversarial point clouds with trivial perturbations. Experiments demonstrate that our attack competitively outperforms existing white/black-box attackers in terms of attack performance and adversary quality.