 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBuilding Machine Learning Challenges for Anomaly Detection in Science
Mar 03, 2025
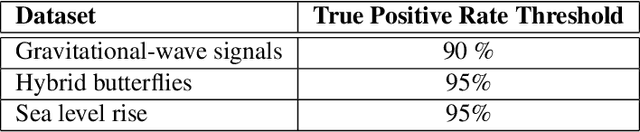


Scientific discoveries are often made by finding a pattern or object that was not predicted by the known rules of science. Oftentimes, these anomalous events or objects that do not conform to the norms are an indication that the rules of science governing the data are incomplete, and something new needs to be present to explain these unexpected outliers. The challenge of finding anomalies can be confounding since it requires codifying a complete knowledge of the known scientific behaviors and then projecting these known behaviors on the data to look for deviations. When utilizing machine learning, this presents a particular challenge since we require that the model not only understands scientific data perfectly but also recognizes when the data is inconsistent and out of the scope of its trained behavior. In this paper, we present three datasets aimed at developing machine learning-based anomaly detection for disparate scientific domains covering astrophysics, genomics, and polar science. We present the different datasets along with a scheme to make machine learning challenges around the three datasets findable, accessible, interoperable, and reusable (FAIR). Furthermore, we present an approach that generalizes to future machine learning challenges, enabling the possibility of large, more compute-intensive challenges that can ultimately lead to scientific discovery.
CoT2Align: Cross-Chain of Thought Distillation via Optimal Transport Alignment for Language Models with Different Tokenizers
Feb 25, 2025



Large Language Models (LLMs) achieve state-of-the-art performance across various NLP tasks but face deployment challenges due to high computational costs and memory constraints. Knowledge distillation (KD) is a promising solution, transferring knowledge from large teacher models to smaller student models. However, existing KD methods often assume shared vocabularies and tokenizers, limiting their flexibility. While approaches like Universal Logit Distillation (ULD) and Dual-Space Knowledge Distillation (DSKD) address vocabulary mismatches, they overlook the critical \textbf{reasoning-aware distillation} aspect. To bridge this gap, we propose CoT2Align a universal KD framework that integrates Chain-of-Thought (CoT) augmentation and introduces Cross-CoT Alignment to enhance reasoning transfer. Additionally, we extend Optimal Transport beyond token-wise alignment to a sequence-level and layer-wise alignment approach that adapts to varying sequence lengths while preserving contextual integrity. Comprehensive experiments demonstrate that CoT2Align outperforms existing KD methods across different vocabulary settings, improving reasoning capabilities and robustness in domain-specific tasks.
RepLoRA: Reparameterizing Low-Rank Adaptation via the Perspective of Mixture of Experts
Feb 05, 2025Low-rank adaptation (LoRA) has emerged as a powerful method for fine-tuning large-scale foundation models. Despite its popularity, the theoretical understanding of LoRA has remained limited. This paper presents a theoretical analysis of LoRA by examining its connection to the Mixture of Experts models. Under this framework, we show that simple reparameterizations of the LoRA matrices can notably accelerate the low-rank matrix estimation process. In particular, we prove that reparameterization can reduce the data needed to achieve a desired estimation error from an exponential to a polynomial scale. Motivated by this insight, we propose Reparameterized Low-rank Adaptation (RepLoRA), which incorporates lightweight MLPs to reparameterize the LoRA matrices. Extensive experiments across multiple domains demonstrate that RepLoRA consistently outperforms vanilla LoRA. Notably, with limited data, RepLoRA surpasses LoRA by a margin of up to 40.0% and achieves LoRA's performance with only 30.0% of the training data, highlighting both the theoretical and empirical robustness of our PEFT method.
Improved Training Technique for Latent Consistency Models
Feb 03, 2025



Consistency models are a new family of generative models capable of producing high-quality samples in either a single step or multiple steps. Recently, consistency models have demonstrated impressive performance, achieving results on par with diffusion models in the pixel space. However, the success of scaling consistency training to large-scale datasets, particularly for text-to-image and video generation tasks, is determined by performance in the latent space. In this work, we analyze the statistical differences between pixel and latent spaces, discovering that latent data often contains highly impulsive outliers, which significantly degrade the performance of iCT in the latent space. To address this, we replace Pseudo-Huber losses with Cauchy losses, effectively mitigating the impact of outliers. Additionally, we introduce a diffusion loss at early timesteps and employ optimal transport (OT) coupling to further enhance performance. Lastly, we introduce the adaptive scaling-$c$ scheduler to manage the robust training process and adopt Non-scaling LayerNorm in the architecture to better capture the statistics of the features and reduce outlier impact. With these strategies, we successfully train latent consistency models capable of high-quality sampling with one or two steps, significantly narrowing the performance gap between latent consistency and diffusion models. The implementation is released here: https://github.com/quandao10/sLCT/
Fantastic Targets for Concept Erasure in Diffusion Models and Where To Find Them
Jan 31, 2025Concept erasure has emerged as a promising technique for mitigating the risk of harmful content generation in diffusion models by selectively unlearning undesirable concepts. The common principle of previous works to remove a specific concept is to map it to a fixed generic concept, such as a neutral concept or just an empty text prompt. In this paper, we demonstrate that this fixed-target strategy is suboptimal, as it fails to account for the impact of erasing one concept on the others. To address this limitation, we model the concept space as a graph and empirically analyze the effects of erasing one concept on the remaining concepts. Our analysis uncovers intriguing geometric properties of the concept space, where the influence of erasing a concept is confined to a local region. Building on this insight, we propose the Adaptive Guided Erasure (AGE) method, which \emph{dynamically} selects optimal target concepts tailored to each undesirable concept, minimizing unintended side effects. Experimental results show that AGE significantly outperforms state-of-the-art erasure methods on preserving unrelated concepts while maintaining effective erasure performance. Our code is published at {https://github.com/tuananhbui89/Adaptive-Guided-Erasure}.
Brain-to-Text Benchmark '24: Lessons Learned
Dec 23, 2024

Speech brain-computer interfaces aim to decipher what a person is trying to say from neural activity alone, restoring communication to people with paralysis who have lost the ability to speak intelligibly. The Brain-to-Text Benchmark '24 and associated competition was created to foster the advancement of decoding algorithms that convert neural activity to text. Here, we summarize the lessons learned from the competition ending on June 1, 2024 (the top 4 entrants also presented their experiences in a recorded webinar). The largest improvements in accuracy were achieved using an ensembling approach, where the output of multiple independent decoders was merged using a fine-tuned large language model (an approach used by all 3 top entrants). Performance gains were also found by improving how the baseline recurrent neural network (RNN) model was trained, including by optimizing learning rate scheduling and by using a diphone training objective. Improving upon the model architecture itself proved more difficult, however, with attempts to use deep state space models or transformers not yet appearing to offer a benefit over the RNN baseline. The benchmark will remain open indefinitely to support further work towards increasing the accuracy of brain-to-text algorithms.
Large-Scale Data-Free Knowledge Distillation for ImageNet via Multi-Resolution Data Generation
Nov 26, 2024



Data-Free Knowledge Distillation (DFKD) is an advanced technique that enables knowledge transfer from a teacher model to a student model without relying on original training data. While DFKD methods have achieved success on smaller datasets like CIFAR10 and CIFAR100, they encounter challenges on larger, high-resolution datasets such as ImageNet. A primary issue with previous approaches is their generation of synthetic images at high resolutions (e.g., $224 \times 224$) without leveraging information from real images, often resulting in noisy images that lack essential class-specific features in large datasets. Additionally, the computational cost of generating the extensive data needed for effective knowledge transfer can be prohibitive. In this paper, we introduce MUlti-reSolution data-freE (MUSE) to address these limitations. MUSE generates images at lower resolutions while using Class Activation Maps (CAMs) to ensure that the generated images retain critical, class-specific features. To further enhance model diversity, we propose multi-resolution generation and embedding diversity techniques that strengthen latent space representations, leading to significant performance improvements. Experimental results demonstrate that MUSE achieves state-of-the-art performance across both small- and large-scale datasets, with notable performance gains of up to two digits in nearly all ImageNet and subset experiments. Code is available at https://github.com/tmtuan1307/muse.
Brain-to-Text Decoding with Context-Aware Neural Representations and Large Language Models
Nov 16, 2024



Decoding attempted speech from neural activity offers a promising avenue for restoring communication abilities in individuals with speech impairments. Previous studies have focused on mapping neural activity to text using phonemes as the intermediate target. While successful, decoding neural activity directly to phonemes ignores the context dependent nature of the neural activity-to-phoneme mapping in the brain, leading to suboptimal decoding performance. In this work, we propose the use of diphone - an acoustic representation that captures the transitions between two phonemes - as the context-aware modeling target. We integrate diphones into existing phoneme decoding frameworks through a novel divide-and-conquer strategy in which we model the phoneme distribution by marginalizing over the diphone distribution. Our approach effectively leverages the enhanced context-aware representation of diphones while preserving the manageable class size of phonemes, a key factor in simplifying the subsequent phoneme-to-text conversion task. We demonstrate the effectiveness of our approach on the Brain-to-Text 2024 benchmark, where it achieves state-of-the-art Phoneme Error Rate (PER) of 15.34% compared to 16.62% PER of monophone-based decoding. When coupled with finetuned Large Language Models (LLMs), our method yields a Word Error Rate (WER) of 5.77%, significantly outperforming the 8.93% WER of the leading method in the benchmark.
Erasing Undesirable Concepts in Diffusion Models with Adversarial Preservation
Oct 21, 2024



Diffusion models excel at generating visually striking content from text but can inadvertently produce undesirable or harmful content when trained on unfiltered internet data. A practical solution is to selectively removing target concepts from the model, but this may impact the remaining concepts. Prior approaches have tried to balance this by introducing a loss term to preserve neutral content or a regularization term to minimize changes in the model parameters, yet resolving this trade-off remains challenging. In this work, we propose to identify and preserving concepts most affected by parameter changes, termed as \textit{adversarial concepts}. This approach ensures stable erasure with minimal impact on the other concepts. We demonstrate the effectiveness of our method using the Stable Diffusion model, showing that it outperforms state-of-the-art erasure methods in eliminating unwanted content while maintaining the integrity of other unrelated elements. Our code is available at \url{https://github.com/tuananhbui89/Erasing-Adversarial-Preservation}.
Leveraging Hierarchical Taxonomies in Prompt-based Continual Learning
Oct 06, 2024



Drawing inspiration from human learning behaviors, this work proposes a novel approach to mitigate catastrophic forgetting in Prompt-based Continual Learning models by exploiting the relationships between continuously emerging class data. We find that applying human habits of organizing and connecting information can serve as an efficient strategy when training deep learning models. Specifically, by building a hierarchical tree structure based on the expanding set of labels, we gain fresh insights into the data, identifying groups of similar classes could easily cause confusion. Additionally, we delve deeper into the hidden connections between classes by exploring the original pretrained model's behavior through an optimal transport-based approach. From these insights, we propose a novel regularization loss function that encourages models to focus more on challenging knowledge areas, thereby enhancing overall performance. Experimentally, our method demonstrated significant superiority over the most robust state-of-the-art models on various benchmarks.