 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNatural Gradient Bayesian Filtering: Geometry-Aware Filter for Dynamical Systems
May 04, 2026Bayesian filtering is a cornerstone of state estimation in complex systems such as aerospace systems, yet exact solutions are available only for linear Gaussian models. In practice,nonlinear systems are handled through tractable approximations,with Gaussian filters such as the extended and unscented Kalman filters being among the most widely used methods. This tutorial revisits Gaussian filtering from an information-geometric perspective, viewing the prediction and measurement update steps as inference procedures over state distributions. Within this framework, we introduce a geometry-aware Gaussian filtering approach that leverages natural gradient descent on the statistical manifold of Gaussian distributions. The resulting Natural Gradient Gaussian Approximation (NANO) filter iteratively refines the posterior mean and covariance while respecting the intrinsic geometry of the Gaussian family and preserving the positive definiteness of the covariance matrix. We further highlight fundamental connections to the classical Kalman filtering, showing that a single natural-gradient step exactly recovers the Kalman measurement update in the linear-Gaussian case. The practical implications of the proposed framework are illustrated through case studies in representative nonlinear estimation problems,including satellite attitude estimation, simultaneous localization and mapping, and state estimation for robotic systems including quadruped and humanoid robots.
Event-Triggered Distributed Target Tracking via PRIMEX
Apr 23, 2026PRIMEX (prime-based graph encoding and extraction) is a recently proposed framework for scalable distributed fusion. In PRIMEX, the information pedigree of state estimates or probability density functions is encoded using the information codes, enabling lightweight arithmetic for redundancy removal and data integration. Building on PRIMEX and its memoryless fusion strategy based on a least-squares approximation, in this paper we present two efficient distributed tracking algorithms: a consensus-based PRIMEX method that fuses information from all neighbors, and a greedy gossip-based PRIMEX method that fuses with the most informative neighbor. To further increase communication efficiency, we incorporate an event-triggered mechanism, in which transmission decisions are driven by information novelty measured using differences between the information codes. The proposed methods are evaluated and compared with covariance intersection and centralized fusion in a distributed single target tracking scenario. Simulation results show that PRIMEX-based methods remain competitive in tracking accuracy while improving communication efficiency.
Probabilistic Trajectory GOSPA: A Metric for Uncertainty-Aware Multi-Object Tracking Performance Evaluation
Jun 18, 2025This paper presents a generalization of the trajectory general optimal sub-pattern assignment (GOSPA) metric for evaluating multi-object tracking algorithms that provide trajectory estimates with track-level uncertainties. This metric builds on the recently introduced probabilistic GOSPA metric to account for both the existence and state estimation uncertainties of individual object states. Similar to trajectory GOSPA (TGOSPA), it can be formulated as a multidimensional assignment problem, and its linear programming relaxation--also a valid metric--is computable in polynomial time. Additionally, this metric retains the interpretability of TGOSPA, and we show that its decomposition yields intuitive costs terms associated to expected localization error and existence probability mismatch error for properly detected objects, expected missed and false detection error, and track switch error. The effectiveness of the proposed metric is demonstrated through a simulation study.
Probabilistic GOSPA: A Metric for Performance Evaluation of Multi-Object Filters with Uncertainties
Dec 16, 2024



This paper presents a probabilistic generalization of the generalized optimal subpattern assignment (GOSPA) metric, termed P-GOSPA metric. GOSPA is a popular metric for evaluating the distance between finite sets, typically in multi-object estimation applications. P-GOSPA extends GOSPA to the space of multi-Bernoulli set densities, incorporating the inherent uncertainty in probabilistic multi-object representations. In addition, P-GOSPA retains the interpretability of GOSPA, such as decomposability into localization, missed and false detection errors, in a sound manner. Examples and simulations are presented to demonstrate the efficacy of P-GOSPA.
Autoencoder Regularized Network For Driving Style Representation Learning
Jan 05, 2017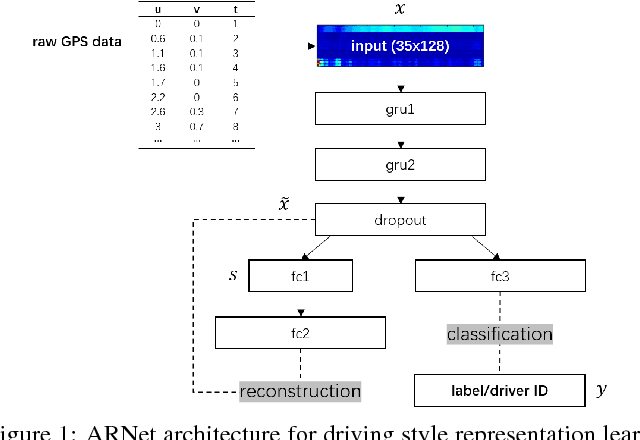
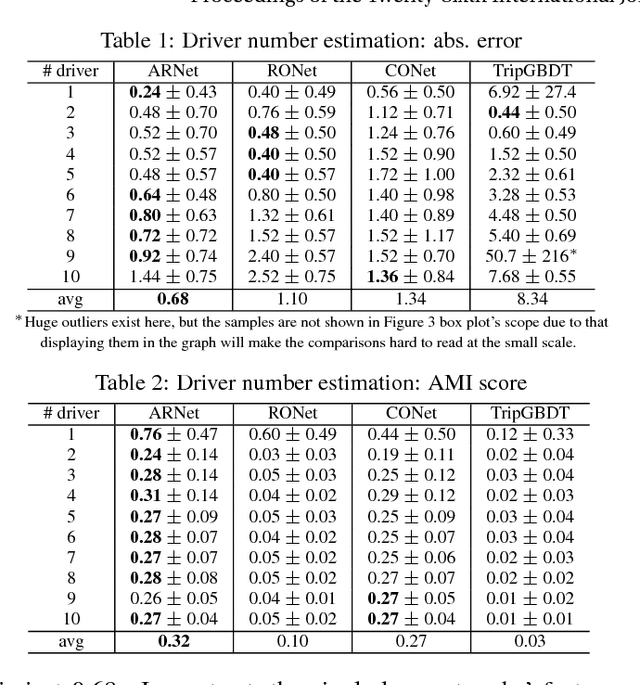
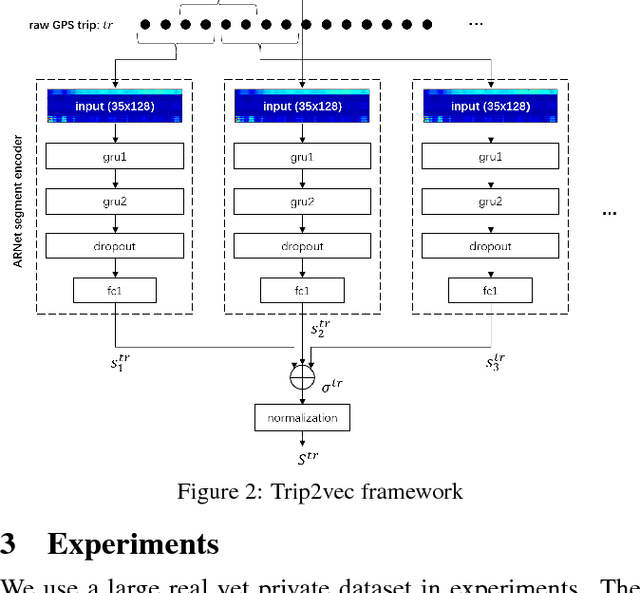
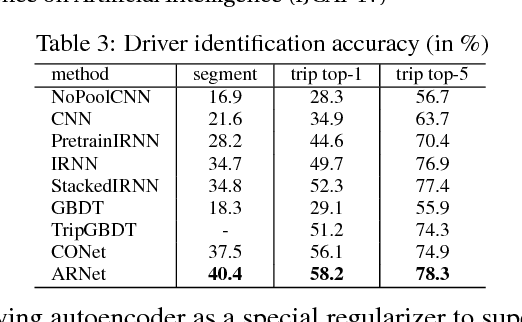
In this paper, we study learning generalized driving style representations from automobile GPS trip data. We propose a novel Autoencoder Regularized deep neural Network (ARNet) and a trip encoding framework trip2vec to learn drivers' driving styles directly from GPS records, by combining supervised and unsupervised feature learning in a unified architecture. Experiments on a challenging driver number estimation problem and the driver identification problem show that ARNet can learn a good generalized driving style representation: It significantly outperforms existing methods and alternative architectures by reaching the least estimation error on average (0.68, less than one driver) and the highest identification accuracy (by at least 3% improvement) compared with traditional supervised learning methods.
Characterizing Driving Styles with Deep Learning
Oct 08, 2016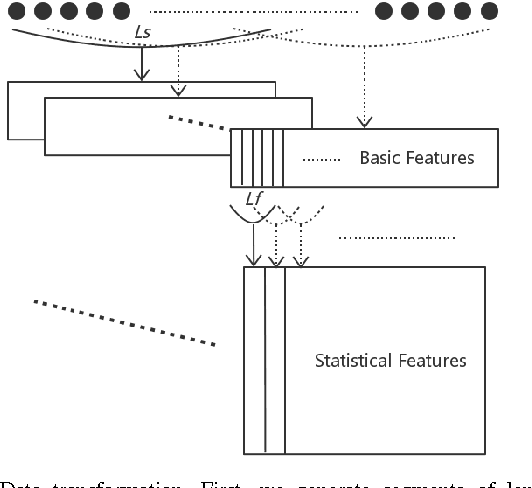
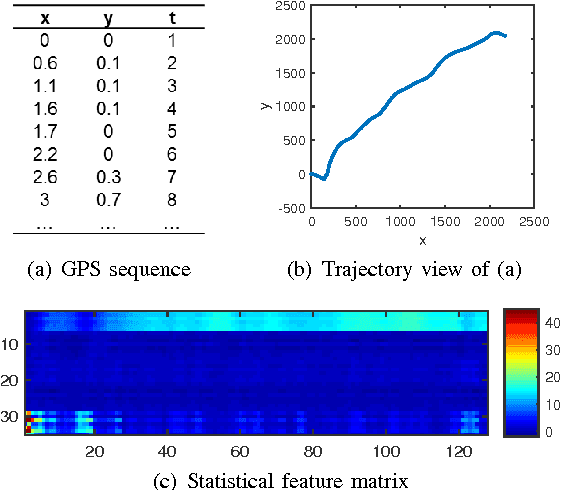
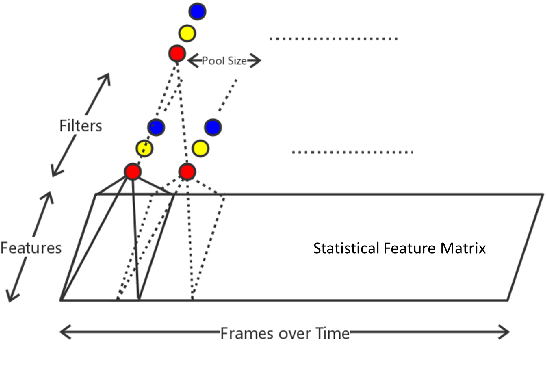
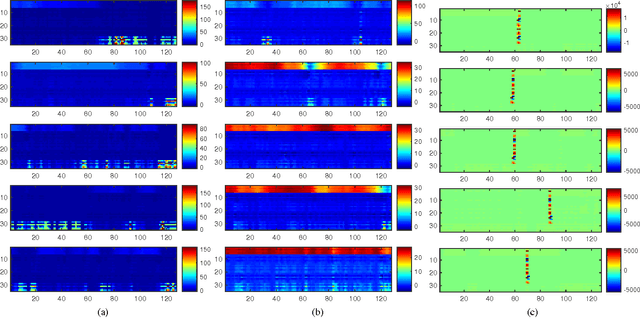
Characterizing driving styles of human drivers using vehicle sensor data, e.g., GPS, is an interesting research problem and an important real-world requirement from automotive industries. A good representation of driving features can be highly valuable for autonomous driving, auto insurance, and many other application scenarios. However, traditional methods mainly rely on handcrafted features, which limit machine learning algorithms to achieve a better performance. In this paper, we propose a novel deep learning solution to this problem, which could be the first attempt of extending deep learning to driving behavior analysis based on GPS data. The proposed approach can effectively extract high level and interpretable features describing complex driving patterns. It also requires significantly less human experience and work. The power of the learned driving style representations are validated through the driver identification problem using a large real dataset.
A Random Finite Set Approach for Dynamic Occupancy Grid Maps with Real-Time Application
Sep 10, 2016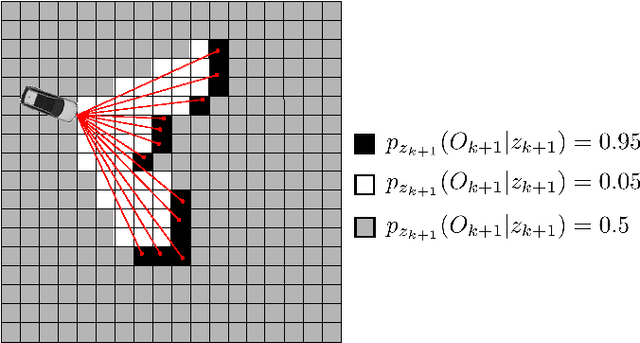
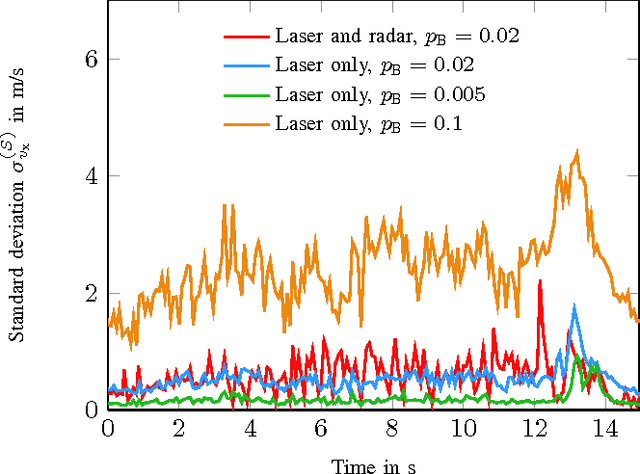
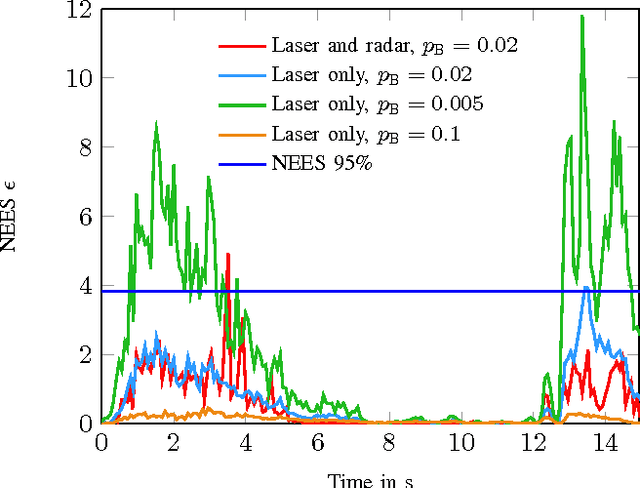
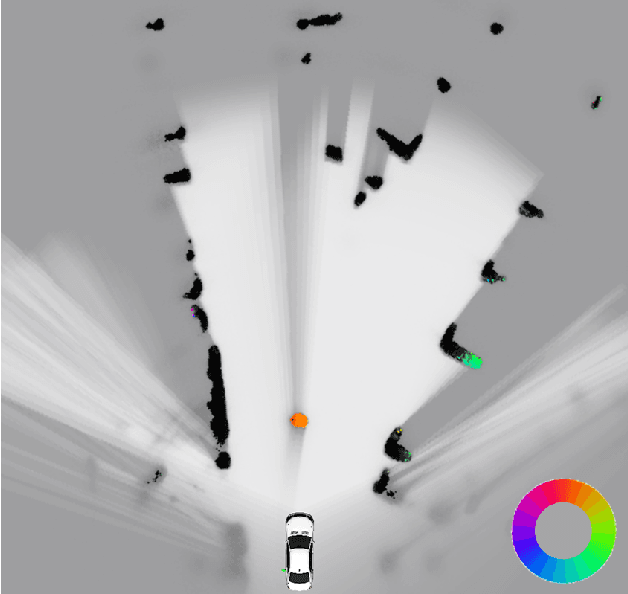
Grid mapping is a well established approach for environment perception in robotic and automotive applications. Early work suggests estimating the occupancy state of each grid cell in a robot's environment using a Bayesian filter to recursively combine new measurements with the current posterior state estimate of each grid cell. This filter is often referred to as binary Bayes filter (BBF). A basic assumption of classical occupancy grid maps is a stationary environment. Recent publications describe bottom-up approaches using particles to represent the dynamic state of a grid cell and outline prediction-update recursions in a heuristic manner. This paper defines the state of multiple grid cells as a random finite set, which allows to model the environment as a stochastic, dynamic system with multiple obstacles, observed by a stochastic measurement system. It motivates an original filter called the probability hypothesis density / multi-instance Bernoulli (PHD/MIB) filter in a top-down manner. The paper presents a real-time application serving as a fusion layer for laser and radar sensor data and describes in detail a highly efficient parallel particle filter implementation. A quantitative evaluation shows that parameters of the stochastic process model affect the filter results as theoretically expected and that appropriate process and observation models provide consistent state estimation results.