 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOrchANN: A Unified I/O Orchestration Framework for Skewed Out-of-Core Vector Search
Dec 28, 2025Approximate nearest neighbor search (ANNS) at billion scale is fundamentally an out-of-core problem: vectors and indexes live on SSD, so performance is dominated by I/O rather than compute. Under skewed semantic embeddings, existing out-of-core systems break down: a uniform local index mismatches cluster scales, static routing misguides queries and inflates the number of probed partitions, and pruning is incomplete at the cluster level and lossy at the vector level, triggering "fetch-to-discard" reranking on raw vectors. We present OrchANN, an out-of-core ANNS engine that uses an I/O orchestration model for unified I/O governance along the route-access-verify pipeline. OrchANN selects a heterogeneous local index per cluster via offline auto-profiling, maintains a query-aware in-memory navigation graph that adapts to skewed workloads, and applies multi-level pruning with geometric bounds to filter both clusters and vectors before issuing SSD reads. Across five standard datasets under strict out-of-core constraints, OrchANN outperforms four baselines including DiskANN, Starling, SPANN, and PipeANN in both QPS and latency while reducing SSD accesses. Furthermore, OrchANN delivers up to 17.2x higher QPS and 25.0x lower latency than competing systems without sacrificing accuracy.
Characterizing Driving Styles with Deep Learning
Oct 08, 2016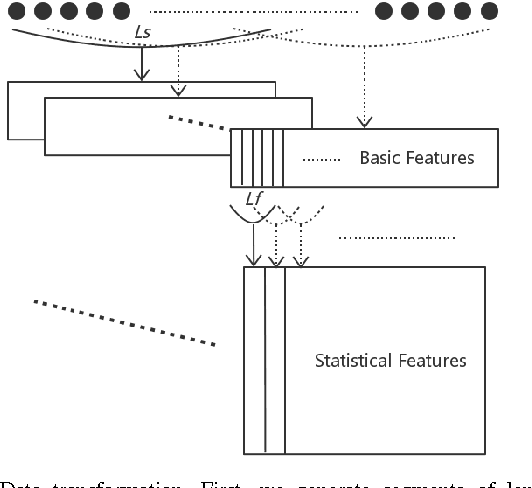
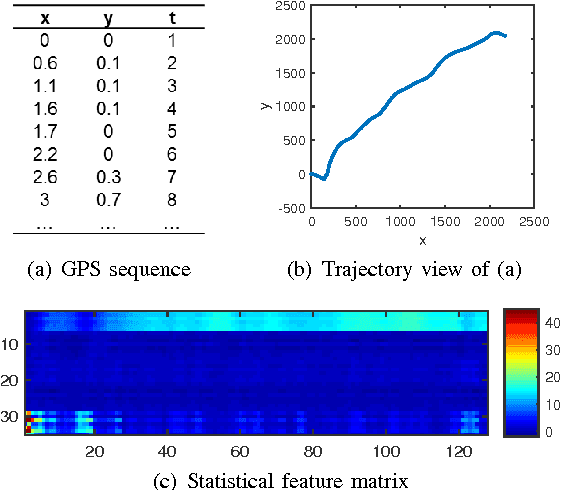
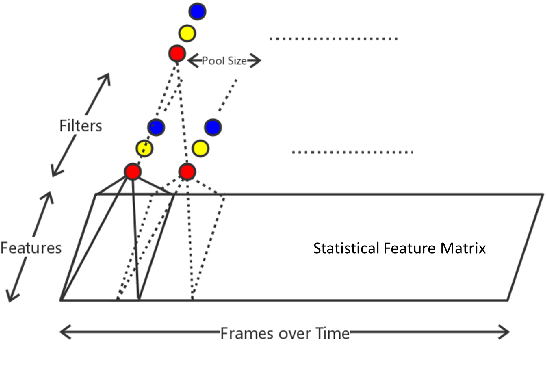
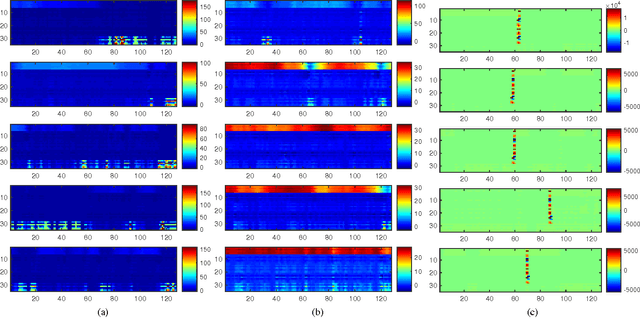
Characterizing driving styles of human drivers using vehicle sensor data, e.g., GPS, is an interesting research problem and an important real-world requirement from automotive industries. A good representation of driving features can be highly valuable for autonomous driving, auto insurance, and many other application scenarios. However, traditional methods mainly rely on handcrafted features, which limit machine learning algorithms to achieve a better performance. In this paper, we propose a novel deep learning solution to this problem, which could be the first attempt of extending deep learning to driving behavior analysis based on GPS data. The proposed approach can effectively extract high level and interpretable features describing complex driving patterns. It also requires significantly less human experience and work. The power of the learned driving style representations are validated through the driver identification problem using a large real dataset.