 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUplink Single-Snapshot Frugal SLAM in Phase-Coherent Distributed MIMO Systems
Apr 15, 2026We consider uplink frugal simultaneous localization and mapping (SLAM) in phase-coherent distributed MIMO (D-MIMO) systems, where a network of spatially separated single-antenna access points (APs) coherently receives narrowband, single-snapshot pilot signals from a single-antenna user equipment (UE). In contrast to existing phase-coherent localization and SLAM methods that rely on wideband measurements and/or multi-antenna APs, the proposed frugal setting operates with the minimum possible localization resources: a single subcarrier and a single snapshot at each single-antenna AP. In this paper, we formulate phase-coherent frugal SLAM as a coherent imaging problem, constructing a spatial image over a region of interest by treating the distributed AP observations as coming from a large synthetic aperture. Based on the coherent image, we develop a detection and localization framework that jointly identifies the UE, reflective surfaces, and scatterers. Simulation results validate the proposed framework and provide insights into the impact of grid resolution and off-grid error on detection and localization performance.
NLOS-Aided Joint OTA Synchronization and Off-Grid Imaging for Distributed MIMO Systems
Mar 14, 2026Distributed multiple-input multiple-output (MIMO) architectures enable large-scale integrated sensing and communication (ISAC) by providing high spatial resolution and robustness through spatial diversity. However, practical phase-coherent sensing is challenged by phase synchronization errors and modeling mismatch caused by grid discretization. Existing over-the-air (OTA) synchronization methods typically treat synchronization and sensing tasks separately, which may lead to inaccurate phase alignment when multipath components are used for imaging. In this paper, we propose a non-line-of-sight (NLOS)-aided joint OTA synchronization and off-grid imaging framework for distributed MIMO ISAC systems. First, a line-of-sight (LOS)-assisted coarse synchronization is performed to establish initial phase coherence across distributed links. Subsequently, an iterative refinement stage exploits reconstructed NLOS components obtained from imaging results. By modeling off-grid effects via a first-order Taylor expansion, we transform measurements with nonlinear off-grid offset into an augmented linear model with jointly sparse reflectivity and off-set variables. The imaging problem is reformulated as a structured sparse recovery task and solved using a tailored off-grid approximate message passing (OG-AMP) algorithm. The imaging and synchronization modules are coupled within a closed-loop alternative optimization framework, where improved imaging enables more accurate phase refinement, and vice versa. Numerical results show that the proposed framework achieves accurate synchronization and imaging under phase errors. Compared with conventional approaches, it shows superior robustness and accuracy.
Exploiting Double-Bounce Paths in Snapshot Radio SLAM: Bounds, Algorithms and Experiments
Mar 03, 2026Radio-based simultaneous localization and mapping (SLAM) has the potential to provide precise user equipment (UE) localization and environmental sensing capabilities by exploiting radio signals. Most existing approaches leverage line-of-sight (LoS) and single-bounce non-line-of-sight (NLoS) paths solely, while higher-order NLoS paths are treated as disturbance. In this paper, we investigate the benefits of leveraging double-bounce NLoS paths for solving the bistatic snapshot radio SLAM problem. We derive the Cramer-Rao bound (CRB) for joint estimation of the UE state and landmark positions when double-bounce NLoS paths are present. In addition, we propose an algorithm to identify double-bounce NLoS paths and leverage them into joint UE and landmarks estimation. The derived bounds are validated through simulated data, and the proposed algorithms are evaluated using experimental millimeter wave (mmWave) measurements harnessing beamformed 5G cellular reference signals. The numerical and experimental results demonstrate that the double-bounce NLoS paths which share at least one incidence point (IP) with the single-bounce NLoS paths improve the estimation accuracy of the UE state and existing IPs of single-bounce NLoS paths. Importantly, exploiting double-bounce NLoS paths enhances environmental mapping capabilities by revealing landmarks that are unobservable with single-bounce NLoS paths alone.
Mismatch Analysis and Cooperative Calibration of Array Beam Patterns for ISAC Systems
Feb 01, 2026Integrated sensing and communication (ISAC) is a key technology for enabling a wide range of applications in future wireless systems. However, the sensing performance is often degraded by model mismatches caused by geometric errors (e.g., position and orientation) and hardware impairments (e.g., mutual coupling and amplifier non-linearity). This paper focuses on the angle estimation performance with antenna arrays and tackles the critical challenge of array beam pattern calibration for ISAC systems. To assess calibration quality from a sensing perspective, a novel performance metric that accounts for angle estimation error, rather than beam pattern similarity, is proposed and incorporated into a differentiable loss function. Additionally, a cooperative calibration framework is introduced, allowing multiple user equipments to iteratively optimize the beam pattern based on the proposed loss functions and local data, and collaboratively update global calibration parameters. The proposed models and algorithms are validated using real-world beam pattern measurements collected in an anechoic chamber. Experimental results show that the angle estimation error can be reduced from {$\textbf{1.01}^\circ$} to $\textbf{0.11}^\circ$ in 2D calibration scenarios, and from $\textbf{5.19}^\circ$ to $\textbf{0.86}^\circ$ in 3D calibration ones.
AscendCraft: Automatic Ascend NPU Kernel Generation via DSL-Guided Transcompilation
Jan 30, 2026The performance of deep learning models critically depends on efficient kernel implementations, yet developing high-performance kernels for specialized accelerators remains time-consuming and expertise-intensive. While recent work demonstrates that large language models (LLMs) can generate correct and performant GPU kernels, kernel generation for neural processing units (NPUs) remains largely underexplored due to domain-specific programming models, limited public examples, and sparse documentation. Consequently, directly generating AscendC kernels with LLMs yields extremely low correctness, highlighting a substantial gap between GPU and NPU kernel generation. We present AscendCraft, a DSL-guided approach for automatic AscendC kernel generation. AscendCraft introduces a lightweight DSL that abstracts non-essential complexity while explicitly modeling Ascend-specific execution semantics. Kernels are first generated in the DSL using category-specific expert examples and then transcompiled into AscendC through structured, constraint-driven LLM lowering passes. Evaluated on MultiKernelBench across seven operator categories, AscendCraft achieves 98.1% compilation success and 90.4% functional correctness. Moreover, 46.2% of generated kernels match or exceed PyTorch eager execution performance, demonstrating that DSL-guided transcompilation can enable LLMs to generate both correct and competitive NPU kernels. Beyond benchmarks, AscendCraft further demonstrates its generality by successfully generating two correct kernels for newly proposed mHC architecture, achieving performance that substantially surpasses PyTorch eager execution.
Sensing with Mobile Devices through Radio SLAM: Models, Methods, Opportunities, and Challenges
Sep 09, 2025



The integration of sensing and communication (ISAC) is a cornerstone of 6G, enabling simultaneous environmental awareness and communication. This paper explores radio SLAM (simultaneous localization and mapping) as a key ISAC approach, using radio signals for mapping and localization. We analyze radio SLAM across different frequency bands, discussing trade-offs in coverage, resolution, and hardware requirements. We also highlight opportunities for integration with sensing, positioning, and cooperative networks. The findings pave the way for standardized solutions in 6G applications such as autonomous systems and industrial robotics.
Probabilistic Trajectory GOSPA: A Metric for Uncertainty-Aware Multi-Object Tracking Performance Evaluation
Jun 18, 2025This paper presents a generalization of the trajectory general optimal sub-pattern assignment (GOSPA) metric for evaluating multi-object tracking algorithms that provide trajectory estimates with track-level uncertainties. This metric builds on the recently introduced probabilistic GOSPA metric to account for both the existence and state estimation uncertainties of individual object states. Similar to trajectory GOSPA (TGOSPA), it can be formulated as a multidimensional assignment problem, and its linear programming relaxation--also a valid metric--is computable in polynomial time. Additionally, this metric retains the interpretability of TGOSPA, and we show that its decomposition yields intuitive costs terms associated to expected localization error and existence probability mismatch error for properly detected objects, expected missed and false detection error, and track switch error. The effectiveness of the proposed metric is demonstrated through a simulation study.
RIS Beam Calibration for ISAC Systems: Modeling and Performance Analysis
May 21, 2025High-accuracy localization is a key enabler for integrated sensing and communication (ISAC), playing an essential role in various applications such as autonomous driving. Antenna arrays and reconfigurable intelligent surface (RIS) are incorporated into these systems to achieve high angular resolution, assisting in the localization process. However, array and RIS beam patterns in practice often deviate from the idealized models used for algorithm design, leading to significant degradation in positioning accuracy. This mismatch highlights the need for beam calibration to bridge the gap between theoretical models and real-world hardware behavior. In this paper, we present and analyze three beam models considering several key non-idealities such as mutual coupling, non-ideal codebook, and measurement uncertainties. Based on the models, we then develop calibration algorithms to estimate the model parameters that can be used for future localization tasks. This work evaluates the effectiveness of the beam models and the calibration algorithms using both theoretical bounds and real-world beam pattern data from an RIS prototype. The simulation results show that the model incorporating combined impacts can accurately reconstruct measured beam patterns. This highlights the necessity of realistic beam modeling and calibration to achieve high-accuracy localization.
Cross-layer Integrated Sensing and Communication: A Joint Industrial and Academic Perspective
May 16, 2025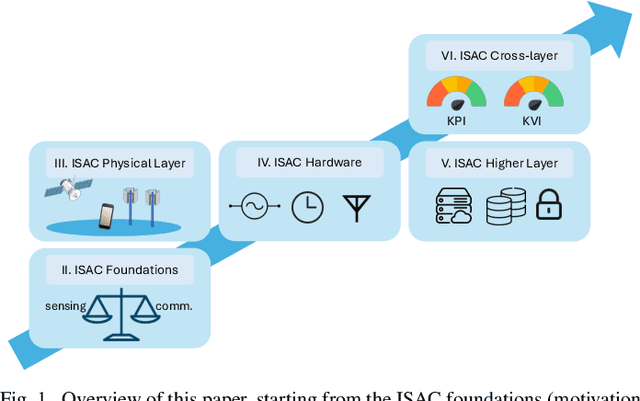



Integrated sensing and communication (ISAC) enables radio systems to simultaneously sense and communicate with their environment. This paper, developed within the Hexa-X-II project funded by the European Union, presents a comprehensive cross-layer vision for ISAC in 6G networks, integrating insights from physical-layer design, hardware architectures, AI-driven intelligence, and protocol-level innovations. We begin by revisiting the foundational principles of ISAC, highlighting synergies and trade-offs between sensing and communication across different integration levels. Enabling technologies, such as multiband operation, massive and distributed MIMO, non-terrestrial networks, reconfigurable intelligent surfaces, and machine learning, are analyzed in conjunction with hardware considerations including waveform design, synchronization, and full-duplex operation. To bridge implementation and system-level evaluation, we introduce a quantitative cross-layer framework linking design parameters to key performance and value indicators. By synthesizing perspectives from both academia and industry, this paper outlines how deeply integrated ISAC can transform 6G into a programmable and context-aware platform supporting applications from reliable wireless access to autonomous mobility and digital twinning.
Pilot-Based End-to-End Radio Positioning and Mapping for ISAC: Beyond Point-Based Landmarks
May 12, 2025



Integrated sensing and communication enables simultaneous communication and sensing tasks, including precise radio positioning and mapping, essential for future 6G networks. Current methods typically model environmental landmarks as isolated incidence points or small reflection areas, lacking detailed attributes essential for advanced environmental interpretation. This paper addresses these limitations by developing an end-to-end cooperative uplink framework involving multiple base stations and users. Our method uniquely estimates extended landmark objects and incorporates obstruction-based outlier removal to mitigate multi-bounce signal effects. Validation using realistic ray-tracing data demonstrates substantial improvements in the richness of the estimated environmental map.