 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign Guidelines for Nonlinear Kalman Filters via Covariance Compensation
Mar 24, 2026Nonlinear extensions of the Kalman filter (KF), such as the extended Kalman filter (EKF) and the unscented Kalman filter (UKF), are indispensable for state estimation in complex dynamical systems, yet the conditions for a nonlinear KF to provide robust and accurate estimations remain poorly understood. This work proposes a theoretical framework that identifies the causes of failure and success in certain nonlinear KFs and establishes guidelines for their improvement. Central to our framework is the concept of covariance compensation: the deviation between the covariance predicted by a nonlinear KF and that of the EKF. With this definition and detailed theoretical analysis, we derive three design guidelines for nonlinear KFs: (i) invariance under orthogonal transformations, (ii) sufficient covariance compensation beyond the EKF baseline, and (iii) selection of compensation magnitude that favors underconfidence. Both theoretical analysis and empirical validation confirm that adherence to these principles significantly improves estimation accuracy, whereas fixed parameter choices commonly adopted in the literature are often suboptimal. The codes and the proofs for all the theorems in this paper are available at https://github.com/Shida-Jiang/Guidelines-for-Nonlinear-Kalman-Filters.
A New Framework for Nonlinear Kalman Filters
Jul 08, 2024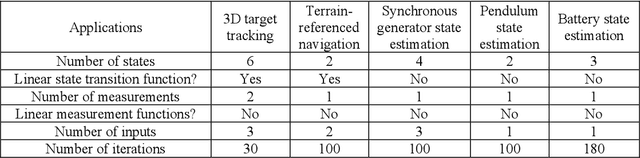
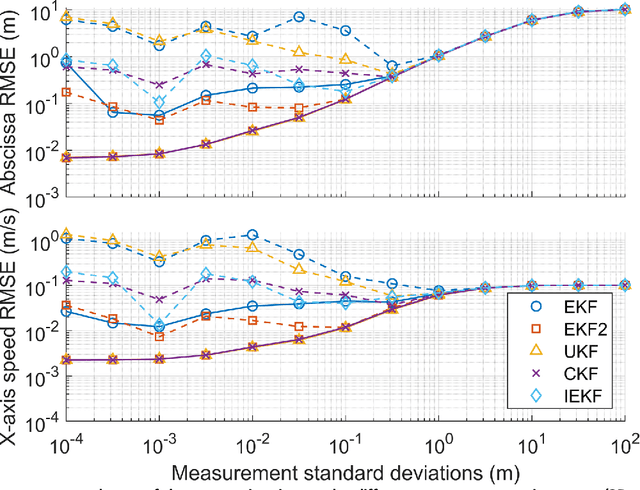
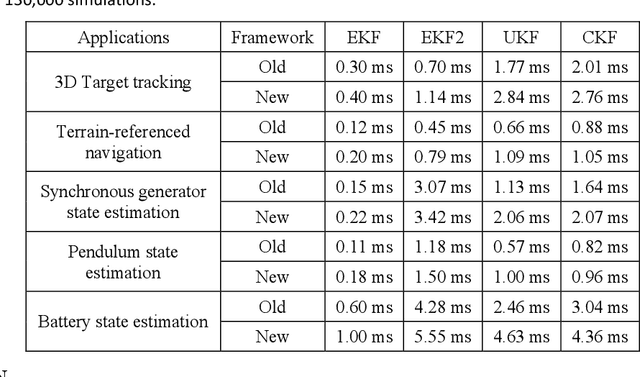

The Kalman filter (KF) is a state estimation algorithm that optimally combines system knowledge and measurements to minimize the mean squared error of the estimated states. While KF was initially designed for linear systems, numerous extensions of it, such as extended Kalman filter (EKF), unscented Kalman filter (UKF), cubature Kalman filter (CKF), etc., have been proposed for nonlinear systems. Although different types of nonlinear KFs have different pros and cons, they all use the same framework of linear KF, which, according to what we found in this paper, tends to give overconfident and less accurate state estimations when the measurement functions are nonlinear. Therefore, in this study, we designed a new framework for nonlinear KFs and showed theoretically and empirically that the new framework estimates the states and covariance matrix more accurately than the old one. The new framework was tested on four different nonlinear KFs and five different tasks, showcasing its ability to reduce the estimation errors by several orders of magnitude in low-measurement-noise conditions, with only about a 10 to 90% increase in computational time. All types of nonlinear KFs can benefit from the new framework, and the benefit will increase as the sensors become more and more accurate in the future. As an example, EKF, the simplest nonlinear KF that was previously believed to work poorly for strongly nonlinear systems, can now provide fast and fairly accurate state estimations with the help of the new framework. The codes are available at https://github.com/Shida-Jiang/A-new-framework-for-nonlinear-Kalman-filters.