 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCLAMP: Contrastive Learning for 3D Multi-View Action-Conditioned Robotic Manipulation Pretraining
Jan 31, 2026Leveraging pre-trained 2D image representations in behavior cloning policies has achieved great success and has become a standard approach for robotic manipulation. However, such representations fail to capture the 3D spatial information about objects and scenes that is essential for precise manipulation. In this work, we introduce Contrastive Learning for 3D Multi-View Action-Conditioned Robotic Manipulation Pretraining (CLAMP), a novel 3D pre-training framework that utilizes point clouds and robot actions. From the merged point cloud computed from RGB-D images and camera extrinsics, we re-render multi-view four-channel image observations with depth and 3D coordinates, including dynamic wrist views, to provide clearer views of target objects for high-precision manipulation tasks. The pre-trained encoders learn to associate the 3D geometric and positional information of objects with robot action patterns via contrastive learning on large-scale simulated robot trajectories. During encoder pre-training, we pre-train a Diffusion Policy to initialize the policy weights for fine-tuning, which is essential for improving fine-tuning sample efficiency and performance. After pre-training, we fine-tune the policy on a limited amount of task demonstrations using the learned image and action representations. We demonstrate that this pre-training and fine-tuning design substantially improves learning efficiency and policy performance on unseen tasks. Furthermore, we show that CLAMP outperforms state-of-the-art baselines across six simulated tasks and five real-world tasks.
Improving cosmological reach of a gravitational wave observatory using Deep Loop Shaping
Sep 17, 2025Improved low-frequency sensitivity of gravitational wave observatories would unlock study of intermediate-mass black hole mergers, binary black hole eccentricity, and provide early warnings for multi-messenger observations of binary neutron star mergers. Today's mirror stabilization control injects harmful noise, constituting a major obstacle to sensitivity improvements. We eliminated this noise through Deep Loop Shaping, a reinforcement learning method using frequency domain rewards. We proved our methodology on the LIGO Livingston Observatory (LLO). Our controller reduced control noise in the 10--30Hz band by over 30x, and up to 100x in sub-bands surpassing the design goal motivated by the quantum limit. These results highlight the potential of Deep Loop Shaping to improve current and future GW observatories, and more broadly instrumentation and control systems.
Imitating Language via Scalable Inverse Reinforcement Learning
Sep 02, 2024



The majority of language model training builds on imitation learning. It covers pretraining, supervised fine-tuning, and affects the starting conditions for reinforcement learning from human feedback (RLHF). The simplicity and scalability of maximum likelihood estimation (MLE) for next token prediction led to its role as predominant paradigm. However, the broader field of imitation learning can more effectively utilize the sequential structure underlying autoregressive generation. We focus on investigating the inverse reinforcement learning (IRL) perspective to imitation, extracting rewards and directly optimizing sequences instead of individual token likelihoods and evaluate its benefits for fine-tuning large language models. We provide a new angle, reformulating inverse soft-Q-learning as a temporal difference regularized extension of MLE. This creates a principled connection between MLE and IRL and allows trading off added complexity with increased performance and diversity of generations in the supervised fine-tuning (SFT) setting. We find clear advantages for IRL-based imitation, in particular for retaining diversity while maximizing task performance, rendering IRL a strong alternative on fixed SFT datasets even without online data generation. Our analysis of IRL-extracted reward functions further indicates benefits for more robust reward functions via tighter integration of supervised and preference-based LLM post-training.
Learning Robot Soccer from Egocentric Vision with Deep Reinforcement Learning
May 03, 2024



We apply multi-agent deep reinforcement learning (RL) to train end-to-end robot soccer policies with fully onboard computation and sensing via egocentric RGB vision. This setting reflects many challenges of real-world robotics, including active perception, agile full-body control, and long-horizon planning in a dynamic, partially-observable, multi-agent domain. We rely on large-scale, simulation-based data generation to obtain complex behaviors from egocentric vision which can be successfully transferred to physical robots using low-cost sensors. To achieve adequate visual realism, our simulation combines rigid-body physics with learned, realistic rendering via multiple Neural Radiance Fields (NeRFs). We combine teacher-based multi-agent RL and cross-experiment data reuse to enable the discovery of sophisticated soccer strategies. We analyze active-perception behaviors including object tracking and ball seeking that emerge when simply optimizing perception-agnostic soccer play. The agents display equivalent levels of performance and agility as policies with access to privileged, ground-truth state. To our knowledge, this paper constitutes a first demonstration of end-to-end training for multi-agent robot soccer, mapping raw pixel observations to joint-level actions, that can be deployed in the real world. Videos of the game-play and analyses can be seen on our website https://sites.google.com/view/vision-soccer .
Replay across Experiments: A Natural Extension of Off-Policy RL
Nov 28, 2023



Replaying data is a principal mechanism underlying the stability and data efficiency of off-policy reinforcement learning (RL). We present an effective yet simple framework to extend the use of replays across multiple experiments, minimally adapting the RL workflow for sizeable improvements in controller performance and research iteration times. At its core, Replay Across Experiments (RaE) involves reusing experience from previous experiments to improve exploration and bootstrap learning while reducing required changes to a minimum in comparison to prior work. We empirically show benefits across a number of RL algorithms and challenging control domains spanning both locomotion and manipulation, including hard exploration tasks from egocentric vision. Through comprehensive ablations, we demonstrate robustness to the quality and amount of data available and various hyperparameter choices. Finally, we discuss how our approach can be applied more broadly across research life cycles and can increase resilience by reloading data across random seeds or hyperparameter variations.
Exploring Exploration: Comparing Children with RL Agents in Unified Environments
May 06, 2020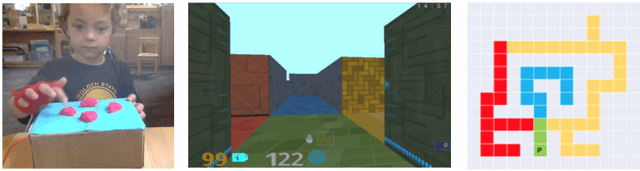
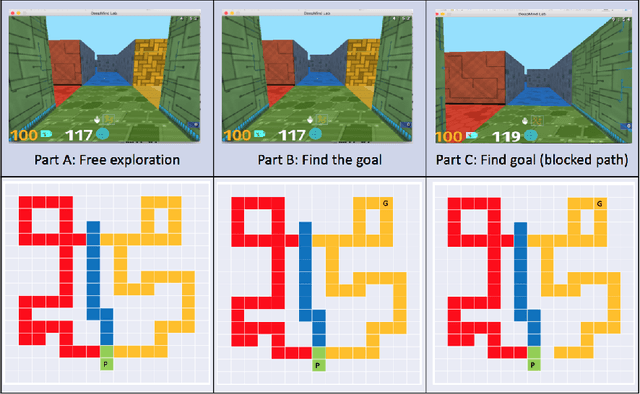
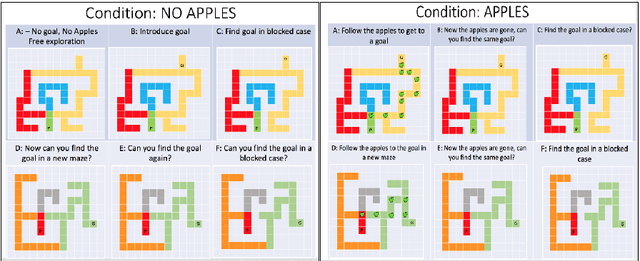
Research in developmental psychology consistently shows that children explore the world thoroughly and efficiently and that this exploration allows them to learn. In turn, this early learning supports more robust generalization and intelligent behavior later in life. While much work has gone into developing methods for exploration in machine learning, artificial agents have not yet reached the high standard set by their human counterparts. In this work we propose using DeepMind Lab (Beattie et al., 2016) as a platform to directly compare child and agent behaviors and to develop new exploration techniques. We outline two ongoing experiments to demonstrate the effectiveness of a direct comparison, and outline a number of open research questions that we believe can be tested using this methodology.
Adversarial Attacks on Neural Network Policies
Feb 08, 2017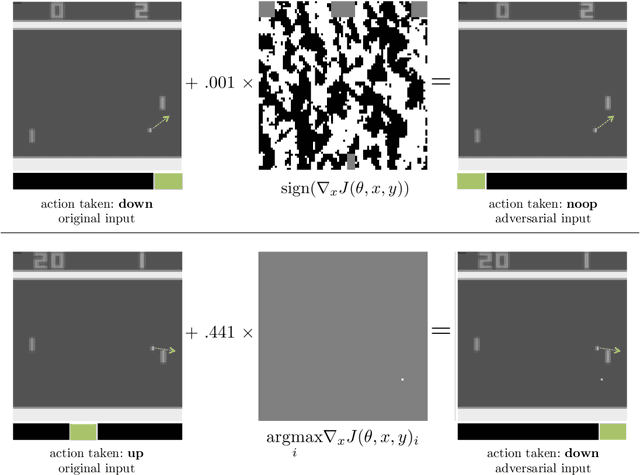
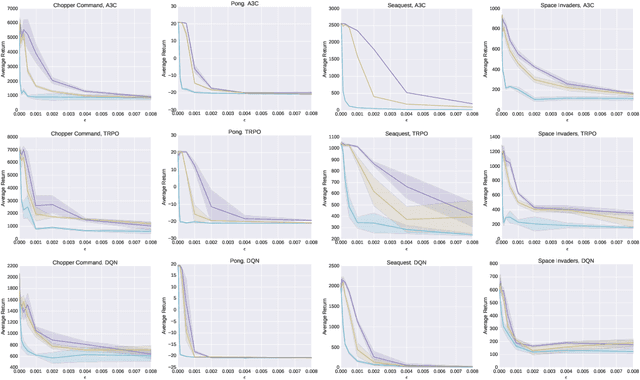
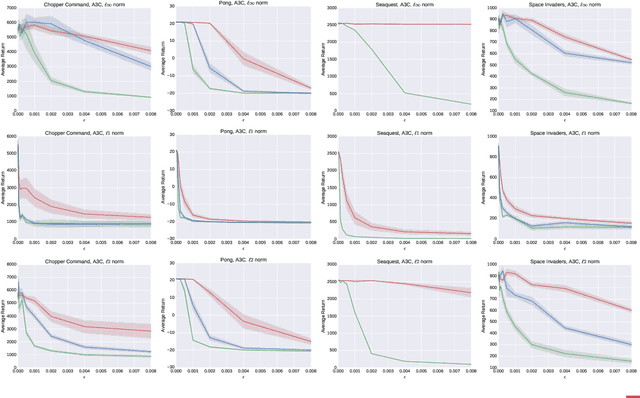
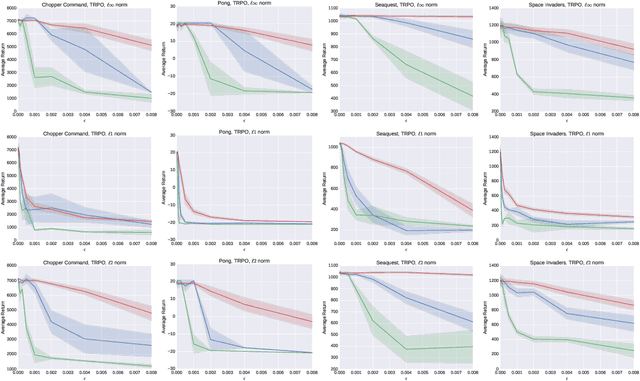
Machine learning classifiers are known to be vulnerable to inputs maliciously constructed by adversaries to force misclassification. Such adversarial examples have been extensively studied in the context of computer vision applications. In this work, we show adversarial attacks are also effective when targeting neural network policies in reinforcement learning. Specifically, we show existing adversarial example crafting techniques can be used to significantly degrade test-time performance of trained policies. Our threat model considers adversaries capable of introducing small perturbations to the raw input of the policy. We characterize the degree of vulnerability across tasks and training algorithms, for a subclass of adversarial-example attacks in white-box and black-box settings. Regardless of the learned task or training algorithm, we observe a significant drop in performance, even with small adversarial perturbations that do not interfere with human perception. Videos are available at http://rll.berkeley.edu/adversarial.