 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKey Decision-Makers in Multi-Agent Debates: Who Holds the Power?
Nov 14, 2025Recent studies on LLM agent scaling have highlighted the potential of Multi-Agent Debate (MAD) to enhance reasoning abilities. However, the critical aspect of role allocation strategies remains underexplored. In this study, we demonstrate that allocating roles with differing viewpoints to specific positions significantly impacts MAD's performance in reasoning tasks. Specifically, we find a novel role allocation strategy, "Truth Last", which can improve MAD performance by up to 22% in reasoning tasks. To address the issue of unknown truth in practical applications, we propose the Multi-Agent Debate Consistency (MADC) strategy, which systematically simulates and optimizes its core mechanisms. MADC incorporates path consistency to assess agreement among independent roles, simulating the role with the highest consistency score as the truth. We validated MADC across a range of LLMs (9 models), including the DeepSeek-R1 Distilled Models, on challenging reasoning tasks. MADC consistently demonstrated advanced performance, effectively overcoming MAD's performance bottlenecks and providing a crucial pathway for further improvements in LLM agent scaling.
LadderMoE: Ladder-Side Mixture of Experts Adapters for Bronze Inscription Recognition
Oct 02, 2025



Bronze inscriptions (BI), engraved on ritual vessels, constitute a crucial stage of early Chinese writing and provide indispensable evidence for archaeological and historical studies. However, automatic BI recognition remains difficult due to severe visual degradation, multi-domain variability across photographs, rubbings, and tracings, and an extremely long-tailed character distribution. To address these challenges, we curate a large-scale BI dataset comprising 22454 full-page images and 198598 annotated characters spanning 6658 unique categories, enabling robust cross-domain evaluation. Building on this resource, we develop a two-stage detection-recognition pipeline that first localizes inscriptions and then transcribes individual characters. To handle heterogeneous domains and rare classes, we equip the pipeline with LadderMoE, which augments a pretrained CLIP encoder with ladder-style MoE adapters, enabling dynamic expert specialization and stronger robustness. Comprehensive experiments on single-character and full-page recognition tasks demonstrate that our method substantially outperforms state-of-the-art scene text recognition baselines, achieving superior accuracy across head, mid, and tail categories as well as all acquisition modalities. These results establish a strong foundation for bronze inscription recognition and downstream archaeological analysis.
Robust Vision-Language Models via Tensor Decomposition: A Defense Against Adversarial Attacks
Sep 19, 2025



Vision language models (VLMs) excel in multimodal understanding but are prone to adversarial attacks. Existing defenses often demand costly retraining or significant architecture changes. We introduce a lightweight defense using tensor decomposition suitable for any pre-trained VLM, requiring no retraining. By decomposing and reconstructing vision encoder representations, it filters adversarial noise while preserving meaning. Experiments with CLIP on COCO and Flickr30K show improved robustness. On Flickr30K, it restores 12.3\% performance lost to attacks, raising Recall@1 accuracy from 7.5\% to 19.8\%. On COCO, it recovers 8.1\% performance, improving accuracy from 3.8\% to 11.9\%. Analysis shows Tensor Train decomposition with low rank (8-32) and low residual strength ($\alpha=0.1-0.2$) is optimal. This method is a practical, plug-and-play solution with minimal overhead for existing VLMs.
A Multiclass Acoustic Dataset and Interactive Tool for Analyzing Drone Signatures in Real-World Environments
Sep 05, 2025
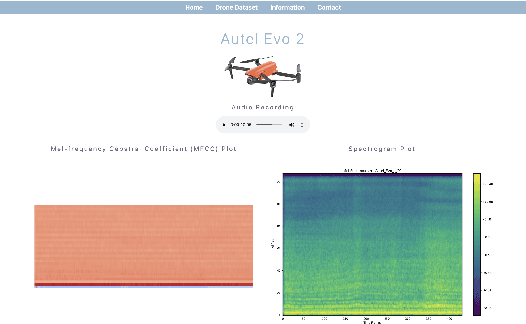

The rapid proliferation of drones across various industries has introduced significant challenges related to privacy, security, and noise pollution. Current drone detection systems, primarily based on visual and radar technologies, face limitations under certain conditions, highlighting the need for effective acoustic-based detection methods. This paper presents a unique and comprehensive dataset of drone acoustic signatures, encompassing 32 different categories differentiated by brand and model. The dataset includes raw audio recordings, spectrogram plots, and Mel-frequency cepstral coefficient (MFCC) plots for each drone. Additionally, we introduce an interactive web application that allows users to explore this dataset by selecting specific drone categories, listening to the associated audio, and viewing the corresponding spectrogram and MFCC plots. This tool aims to facilitate research in drone detection, classification, and acoustic analysis, supporting both technological advancements and educational initiatives. The paper details the dataset creation process, the design and implementation of the web application, and provides experimental results and user feedback. Finally, we discuss potential applications and future work to expand and enhance the project.
OccTENS: 3D Occupancy World Model via Temporal Next-Scale Prediction
Sep 04, 2025In this paper, we propose OccTENS, a generative occupancy world model that enables controllable, high-fidelity long-term occupancy generation while maintaining computational efficiency. Different from visual generation, the occupancy world model must capture the fine-grained 3D geometry and dynamic evolution of the 3D scenes, posing great challenges for the generative models. Recent approaches based on autoregression (AR) have demonstrated the potential to predict vehicle movement and future occupancy scenes simultaneously from historical observations, but they typically suffer from \textbf{inefficiency}, \textbf{temporal degradation} in long-term generation and \textbf{lack of controllability}. To holistically address these issues, we reformulate the occupancy world model as a temporal next-scale prediction (TENS) task, which decomposes the temporal sequence modeling problem into the modeling of spatial scale-by-scale generation and temporal scene-by-scene prediction. With a \textbf{TensFormer}, OccTENS can effectively manage the temporal causality and spatial relationships of occupancy sequences in a flexible and scalable way. To enhance the pose controllability, we further propose a holistic pose aggregation strategy, which features a unified sequence modeling for occupancy and ego-motion. Experiments show that OccTENS outperforms the state-of-the-art method with both higher occupancy quality and faster inference time.
SAIL-Recon: Large SfM by Augmenting Scene Regression with Localization
Aug 25, 2025



Scene regression methods, such as VGGT, solve the Structure-from-Motion (SfM) problem by directly regressing camera poses and 3D scene structures from input images. They demonstrate impressive performance in handling images under extreme viewpoint changes. However, these methods struggle to handle a large number of input images. To address this problem, we introduce SAIL-Recon, a feed-forward Transformer for large scale SfM, by augmenting the scene regression network with visual localization capabilities. Specifically, our method first computes a neural scene representation from a subset of anchor images. The regression network is then fine-tuned to reconstruct all input images conditioned on this neural scene representation. Comprehensive experiments show that our method not only scales efficiently to large-scale scenes, but also achieves state-of-the-art results on both camera pose estimation and novel view synthesis benchmarks, including TUM-RGBD, CO3Dv2, and Tanks & Temples. We will publish our model and code. Code and models are publicly available at: https://hkust-sail.github.io/ sail-recon/.
MGVQ: Could VQ-VAE Beat VAE? A Generalizable Tokenizer with Multi-group Quantization
Jul 10, 2025



Vector Quantized Variational Autoencoders (VQ-VAEs) are fundamental models that compress continuous visual data into discrete tokens. Existing methods have tried to improve the quantization strategy for better reconstruction quality, however, there still exists a large gap between VQ-VAEs and VAEs. To narrow this gap, we propose \NickName, a novel method to augment the representation capability of discrete codebooks, facilitating easier optimization for codebooks and minimizing information loss, thereby enhancing reconstruction quality. Specifically, we propose to retain the latent dimension to preserve encoded features and incorporate a set of sub-codebooks for quantization. Furthermore, we construct comprehensive zero-shot benchmarks featuring resolutions of 512p and 2k to evaluate the reconstruction performance of existing methods rigorously. \NickName~achieves the \textbf{state-of-the-art performance on both ImageNet and $8$ zero-shot benchmarks} across all VQ-VAEs. Notably, compared with SD-VAE, we outperform them on ImageNet significantly, with rFID $\textbf{0.49}$ v.s. $\textbf{0.91}$, and achieve superior PSNR on all zero-shot benchmarks. These results highlight the superiority of \NickName~in reconstruction and pave the way for preserving fidelity in HD image processing tasks. Code will be publicly available at https://github.com/MKJia/MGVQ.
Airway Segmentation Network for Enhanced Tubular Feature Extraction
Jul 09, 2025



Manual annotation of airway regions in computed tomography images is a time-consuming and expertise-dependent task. Automatic airway segmentation is therefore a prerequisite for enabling rapid bronchoscopic navigation and the clinical deployment of bronchoscopic robotic systems. Although convolutional neural network methods have gained considerable attention in airway segmentation, the unique tree-like structure of airways poses challenges for conventional and deformable convolutions, which often fail to focus on fine airway structures, leading to missed segments and discontinuities. To address this issue, this study proposes a novel tubular feature extraction network, named TfeNet. TfeNet introduces a novel direction-aware convolution operation that first applies spatial rotation transformations to adjust the sampling positions of linear convolution kernels. The deformed kernels are then represented as line segments or polylines in 3D space. Furthermore, a tubular feature fusion module (TFFM) is designed based on asymmetric convolution and residual connection strategies, enhancing the network's focus on subtle airway structures. Extensive experiments conducted on one public dataset and two datasets used in airway segmentation challenges demonstrate that the proposed TfeNet achieves more accuracy and continuous airway structure predictions compared with existing methods. In particular, TfeNet achieves the highest overall score of 94.95% on the current largest airway segmentation dataset, Airway Tree Modeling(ATM22), and demonstrates advanced performance on the lung fibrosis dataset(AIIB23). The code is available at https://github.com/QibiaoWu/TfeNet.
ScEdit: Script-based Assessment of Knowledge Editing
May 29, 2025Knowledge Editing (KE) has gained increasing attention, yet current KE tasks remain relatively simple. Under current evaluation frameworks, many editing methods achieve exceptionally high scores, sometimes nearing perfection. However, few studies integrate KE into real-world application scenarios (e.g., recent interest in LLM-as-agent). To support our analysis, we introduce a novel script-based benchmark -- ScEdit (Script-based Knowledge Editing Benchmark) -- which encompasses both counterfactual and temporal edits. We integrate token-level and text-level evaluation methods, comprehensively analyzing existing KE techniques. The benchmark extends traditional fact-based ("What"-type question) evaluation to action-based ("How"-type question) evaluation. We observe that all KE methods exhibit a drop in performance on established metrics and face challenges on text-level metrics, indicating a challenging task. Our benchmark is available at https://github.com/asdfo123/ScEdit.
LiloDriver: A Lifelong Learning Framework for Closed-loop Motion Planning in Long-tail Autonomous Driving Scenarios
May 22, 2025Recent advances in autonomous driving research towards motion planners that are robust, safe, and adaptive. However, existing rule-based and data-driven planners lack adaptability to long-tail scenarios, while knowledge-driven methods offer strong reasoning but face challenges in representation, control, and real-world evaluation. To address these challenges, we present LiloDriver, a lifelong learning framework for closed-loop motion planning in long-tail autonomous driving scenarios. By integrating large language models (LLMs) with a memory-augmented planner generation system, LiloDriver continuously adapts to new scenarios without retraining. It features a four-stage architecture including perception, scene encoding, memory-based strategy refinement, and LLM-guided reasoning. Evaluated on the nuPlan benchmark, LiloDriver achieves superior performance in both common and rare driving scenarios, outperforming static rule-based and learning-based planners. Our results highlight the effectiveness of combining structured memory and LLM reasoning to enable scalable, human-like motion planning in real-world autonomous driving. Our code is available at https://github.com/Hyan-Yao/LiloDriver.